引言
前几节我们逐渐从开环系统走入了闭环系统控制,
在开环系统中,由于缺乏反馈机制,系统无法根据实际表现自动调整控制动作来补偿误差,因此使用的是不需要反馈的P控制。即由放大器+开环系统组成的比例(Propotion)控制系统。
从这节开始,我们讲逐步探究 I控制 和 D控制,即积分、微分控制,并通过一节实践课,在wokwi仿真环境实现步进电机的PID控制算法。
本节我们将承接上节讲的闭环比例控制系统,讲解反馈控制的三大基本规律,并学习一种判断系统稳定性的方法。
反馈控制的基本规律
上一节我们通过对比开闭环控制系统,得到其三个重要参数的关系。
分别是调速范围、静差率、稳态转速降落的关系。

这三条关系就是反馈控制的基本规律:
Ⅰ 比例控制(P)的反馈闭环系统:被调量有静差
对于上一节提到的比例闭环控制系统 以及此前讲的开环控制系统 ,我们通过放大器和开环控制系统的对输出电压调节,输出电压是根据误差电压ΔUn控制的,其中Kp是增益系数。由于其不涉及时间变量,因此能够迅速响应误差的变化,使系统较快地逼近目标值。
然而它通常无法完全消除误差,特别是在稳定状态下仍会存在一定的误差,这就是所谓的"静差"。
静差的存在主要是因为比例控制器仅依赖于当前误差ΔUn来进行调节 ,而没有考虑过去(I积分)或未来的(D微分)信息。
假设在山大宿舍开了暖气控制系统,目标是将宿舍保持在25℃。如果实际室温低于25℃,比例控制器会产生一个与误差成正比的加热信号。随着温度逐渐接近25℃,误差变小,控制器产生的加热信号也随之减小。
但在某一时刻,系统可能会达到一种平衡状态,其中仍有轻微的误差(例如实际温度为24.5℃),但此时比例控制器生成的加热信号刚好等于热量损失,使得温度不再上升也不下降,从而形成了静差。
宿舍温度就一直停留在24.5℃。
Ⅱ 反馈控制系统的作用:抵抗扰动,服从给定
由于反馈环的存在,负载引起的误差通过反馈回路传回给控制器,控制器根据误差信号调节系统的输入,使输出逼近给定值。
在上一节的闭环比例控制系统中,转速作为输出只由输入的给定电压决定。
Ⅲ 系统的精度依赖于给定和反馈检测的精度
反馈回路上除了传感器本身的精度外,数据采集、转换以及传输过程中的任何损失或延迟都会影响到反馈信号的真实性和及时性。因此系统精度受反馈检测精度影响。
比例闭环控制系统的稳态分析
我们将通过分析各分环节的传递函数得到整个系统的传递函数,并通过传递函数得到特性方程从而判定的分析系统的稳定性。
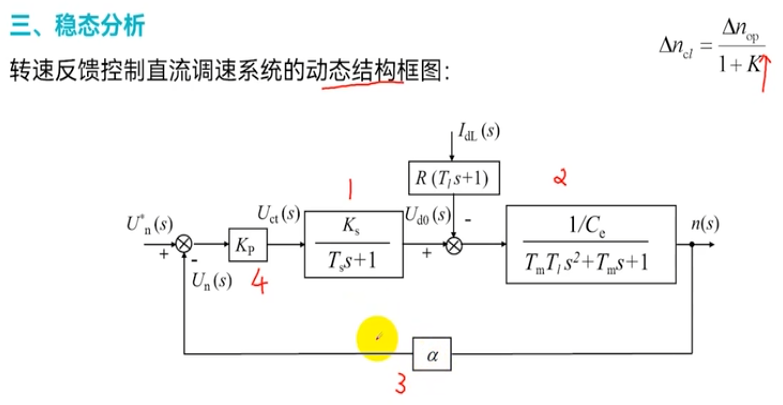
我们将整个系统分为四个部分,
1是开环控制系统,可以是VM或PWM系统,第二节我们推导过其传递函数;
2是直流电机环节,直流电动机由两部分变化构成,一是电和磁的变换,二是电能和机械能的变化,因此要考虑两方面的延时:Tm表示电动机的机电惯性,Tl表示电磁惯性,Tm表示电能和机械能转换过程的延时,Tl表示电磁和磁场转换过程的延时。因此传递函数关于时间是二阶的。
3是反馈环节,也是比例放大作用;
4是比例放大环节;
比例放大是瞬时的,因此不存在延时。
因此整个比例控制系统可以看作是三阶的线性时不变系统。
传递函数
由各部分分传递函数我们得出其整个传递函数:
- Y(s) 是输出的拉普拉斯变换,这里是给定电压
。
- X(s) 是输入的拉普拉斯变换,这里是转速n。
带入得
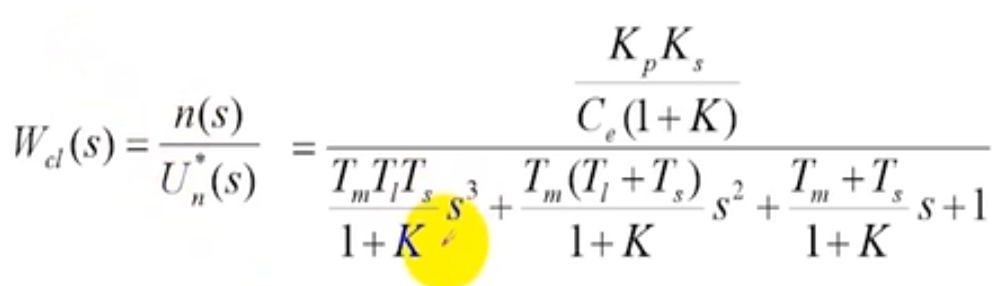
特性方程
特性方程是一个用于确定系统的稳定性、动态响应等特性的工具。(基于纯能量分析我们会使用拉格朗日+李雅普诺夫方程)
他通常是从传递函数的分母中提取出来的,通过将传递函数的分母设置为零来得到。
由传递函数我们可以得到其特性方程:

稳定性 与 劳斯-赫尔维茨稳定性判据
系统的稳定性
指系统在受到扰动后能否能回到原来状态或达到一个新的平衡状态的能力。
根据系统的响应特性,可以分为以下几类:
-
稳定系统:如果一个系统在受到外界干扰后,其输出能够随着时间逐渐回到原来的稳态值(或者是新的稳态值),那么这个系统就是稳定的。
-
临界稳定系统:这种系统的输出在受到扰动后不会发散也不会收敛到某个点,而是保持在一个恒定的波动状态或是等幅振荡。
-
不稳定系统:当一个系统受到任何微小的扰动后,其输出会随着时间无限增大或产生不可预测的行为,无法自行恢复至原先的状态或达到新的稳定状态,则该系统被认为是不稳定的。
劳斯-赫尔维茨稳定性判据
劳斯-赫尔维茨稳定性判据 是
如果系统稳定则要求劳斯表的第一列为正。
因此如何构建一个劳斯表就是关键:
构建劳斯表的核心步骤包括:
- 确定特征方程的系数;
- 按照降幂顺序填入初始行;
- 使用递推公式计算后续行;
- 检查第一列元素的符号变化。
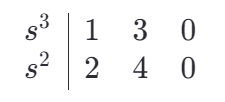
比如有如下三阶特征方程,

Ⅰ 根据特征方程的系数,将它们按降幂顺序排列,填入劳斯表的第一行和第二行:
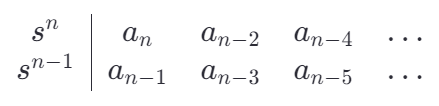
- 第一行包含
- 第二行包含
注意:如果某些次幂的系数缺失(即系数为零),则直接用零填充。
我们根据式子填入:
Ⅱ 计算后续行
从第三行开始,通过递推公式计算每一行的元素。当前行是第 i 行,则其元素由前两行(第 i−1 行和第 i−2 行)计算得到。
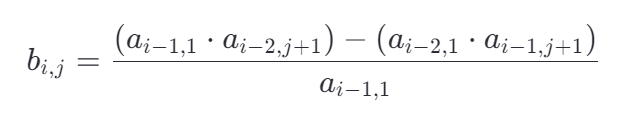
注意:如果在计算过程中某一行的第一个元素为零,则可以用一个很小的正数(如 ϵϵ)代替该零值,继续计算。
带入12行计算第三行,迭代得到第四行有:
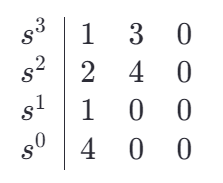
Ⅲ 检查第一列
若为正则系统稳定。
显然为正,因此稳定。
我们考虑这个三阶线性时不变系统:
经计算T与K都为正,因此a0,a1,a2,a3为正,只要证明b大于零,即
a1a2-a0a3>0,
即可确定系统稳定性。
临界放大系数
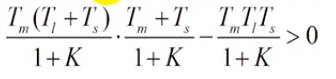
经移项,我们得到K与T的关系:

当系统稳定时,也就是经干扰仍能输出稳定值时,K要满足这个式子,
此时称K为临界放大系数。只有K小于临界放大系数,系统才稳定。
一般这一节最常考的就是最后的临界放大系数的应用,题目先不发。
小结:
Ⅰ 比例控制有无法消除的静差,静差是指输出的修正值与干扰值抵消导致系统始终无法达到给定值的状态。
Ⅱ 反馈控制系统的作用:抵抗扰动,服从给定
Ⅲ 系统的精度依赖于给定和反馈检测的精度
Ⅳ 判断一个系统的稳定性:
先求得各部分传递函数,得到整体传递函数
根据复频域s算子的次数写传递函数
令传递函数的分母为零,得到特征方程
根据劳斯-赫尔维兹判据判断稳定性(或稳定时需要满足的条件)。
下一节我们将从比例系统的不足出发,解决"静差"无法消除的问题。