上节提到,开环控制系统具有以下问题
一是对外部的扰动无法感知,导致误差不断累计,输出转速不稳定。
二是在要求稳定性高且调速范围窄的工艺标准下,很难满足。
本节就来解决这个问题,引入闭环控制。
我们将从系统结构、稳态分析以及与开环系统的对比三个方面进行讲解。
原理框图
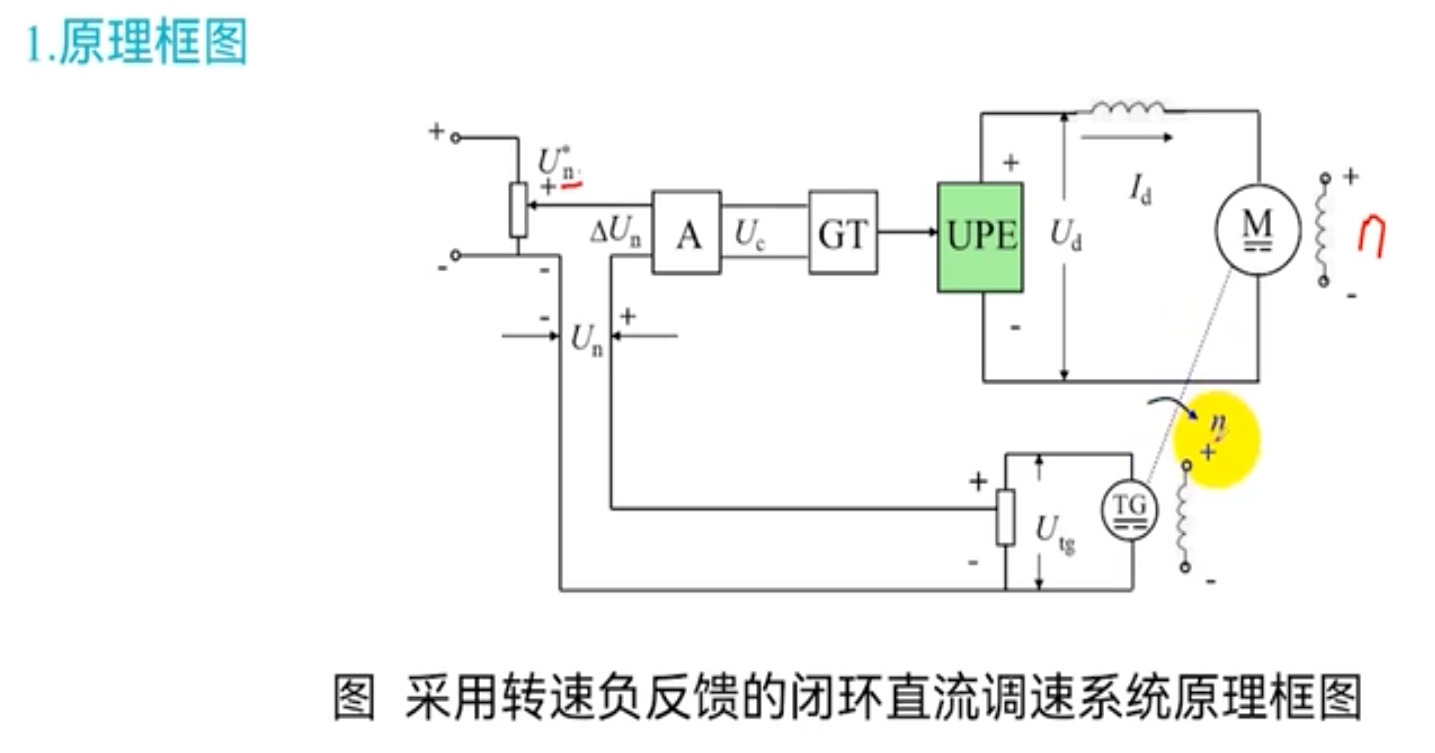
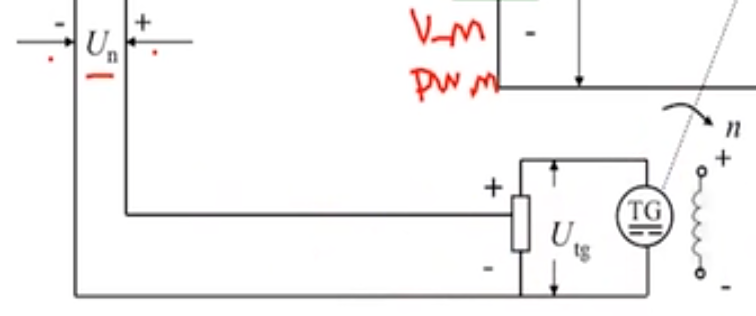
结构流程:
输入电压是,输出是转速n。
我们将一个测速发电机(TG)与电动机(M)同轴安装 ,测速发电机(TG)产生与测速成正比的反馈电压。
反馈电压zhua和给定电压
是串接在一起的,且极性相反,也就是相当于通过他们两个做减法
那这两个电压减出来的结果就是转速偏差电压。
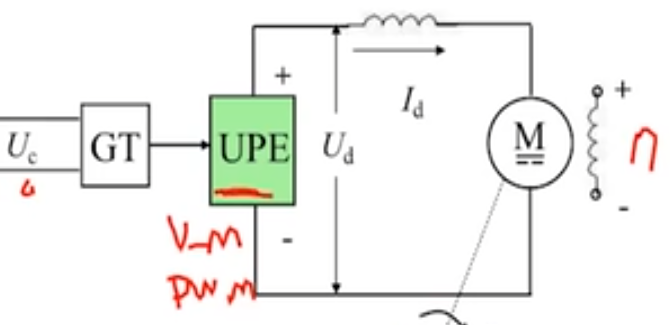
转速偏压经过放大器A放大成控制器接受的控制电压Uc,最后连接GT晶闸管和UPE模块,这个整体可以是V-M系统也可以是PWM开环控制系统。
也就是说,闭环控制系统是在开环控制系统外部加了反馈电路,转速被转化为电压实时反馈运动状态。
稳态分析
我们分别列出各部分的稳态关系
- 对于输入部分:
- 对于放大器:
- 对于开环控制系统与输出转速:
- 对于反馈回路:
综上得到原理框图:
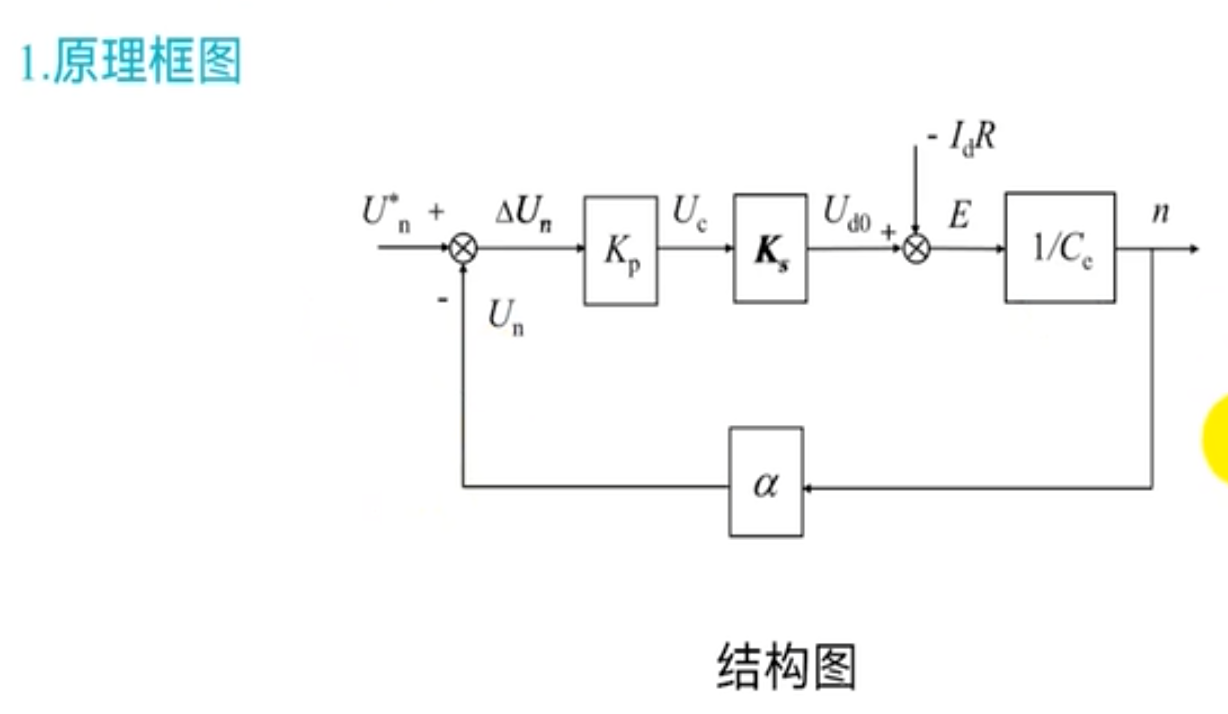
控制流程:
输出一个转速n后,会立马得到反馈电压Un,与标准输入电压做差得到转速偏压ΔUn,经放大器A放大后输入开环控制系统,得到Ud,从而使得n改变。
闭环控制核心概念
这里要建立一个概念,对于闭环系统,我们调节的对象都是 目标量 关于时间的 高阶物理量,什么意思呢?
就是说,我们改变这个量后,需要经过一段时间才能反馈到目标量上。
比如说这个ΔUn,在达到稳态前,**转速的改变量由输出电压Uc决定,**Uc又由反馈电压Un和给定电压共同决定。当接近目标转速时,ΔUn就接近于0,此时代表转速基本不改变了,稳定在某个值。
电压与转速正相关,因此改变的是 转速的改变量,即电压的变化量。
闭环系统能够减少稳态速降的实质,在于它能随着负载的变化而相应地改变电枢电压,以补偿电枢回路电阻压降。
开环闭环系统的对比
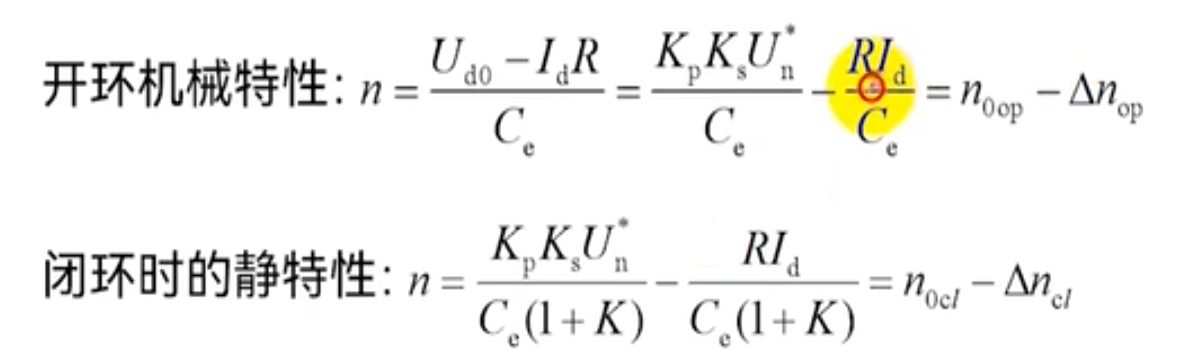
机械特性曲线:
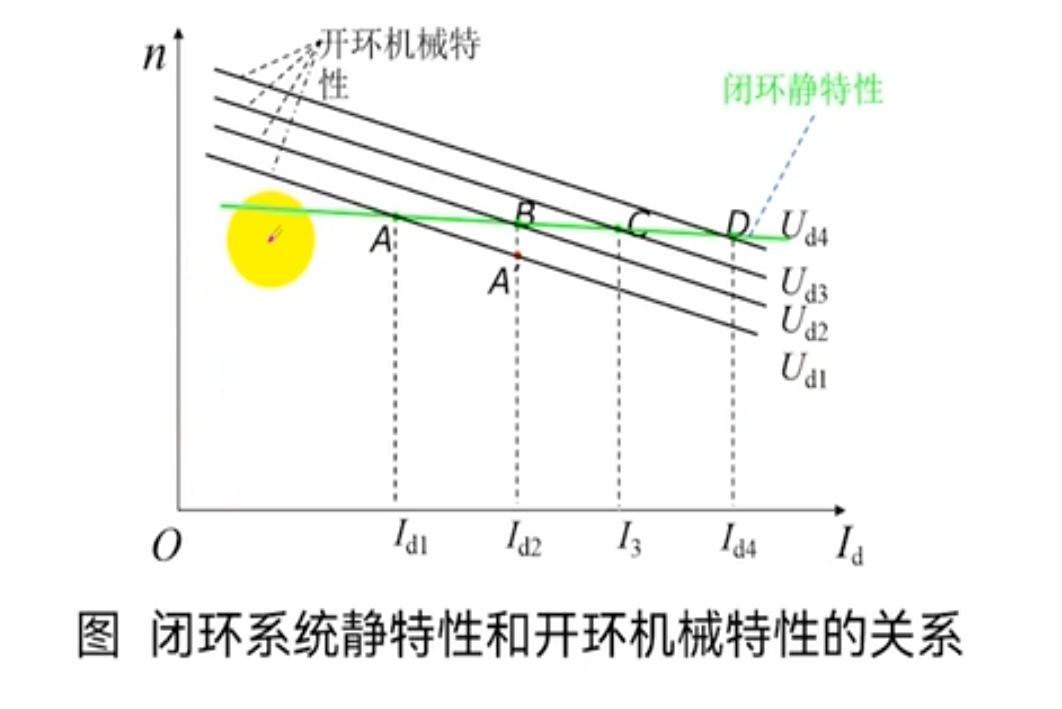
开环系统:

当负载电流变大时,转速显然是线性下降的。
闭环系统:
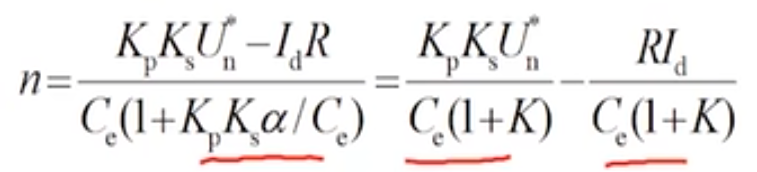
由于有反馈机制,K是闭环系统的开环部分放大系数,电动机放大系数:
。
分母很大,转速降落很小,n较为稳定。
放在一起,
显然,
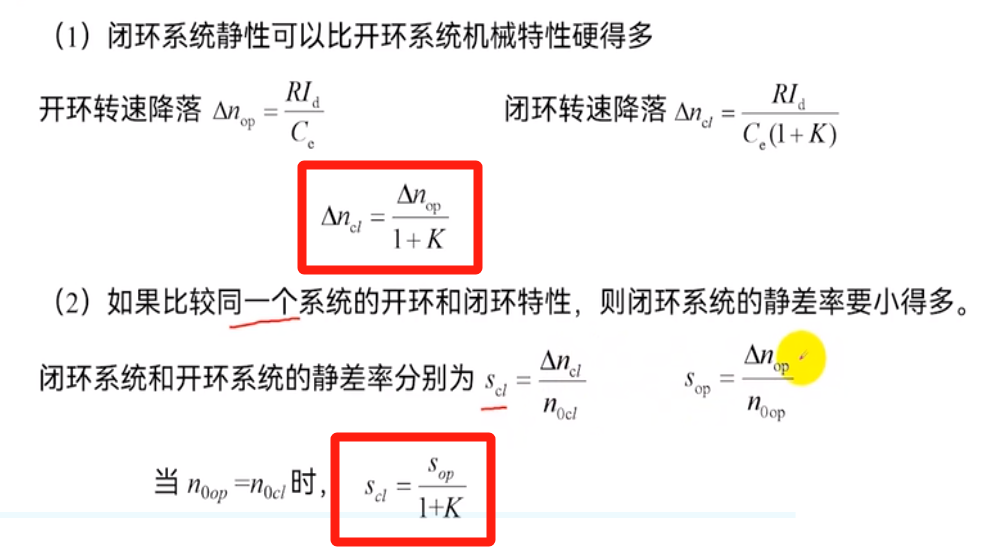
综上,

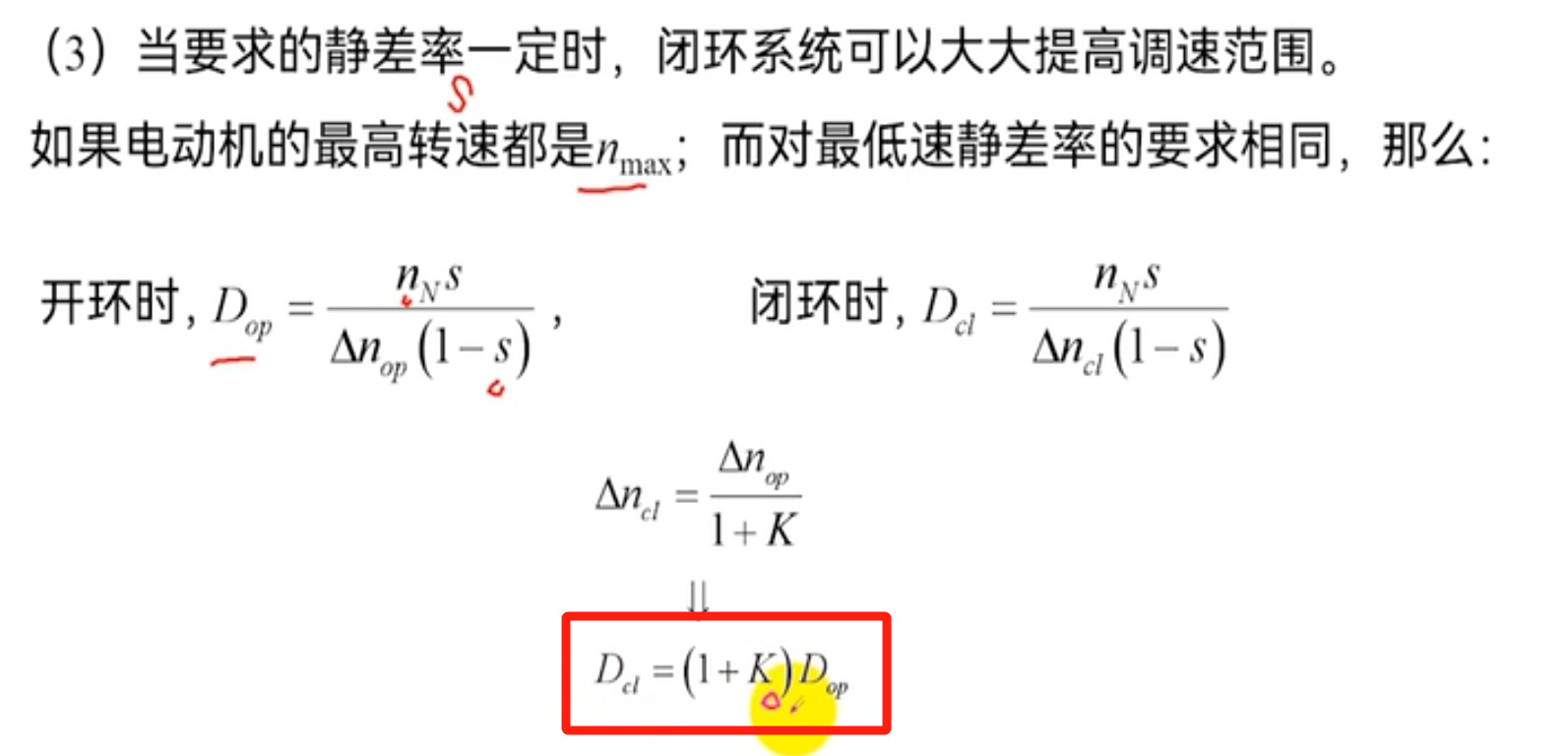
闭环系统的调速范围远大于开环系统;
闭环系统的稳定性越高于闭环系统;
闭环系统的转速降落远小于开环系统;
完胜开环控制系统,唯一的不足是要加装反馈检测装置和放大器。
两个系统的联系
闭环系统的UPE是开环系统构成的,也就是说开环系统是闭环系统结构的一部分。上述对比是为了建立开环系统与闭环系统的三个参数的关系,对于必修课很重要,请务必牢记。
解题思路:一般开环系统满足不了的要求都会由闭环系统实现,因此题目很可能考如果无法满足,在闭环系统如何满足?这时可以利用开闭环系统的比例关系建立等式,求得三个参数的范围。
形象体会一下,依然是上一节最后的题目,接下来求在闭环系统中如何满足这个要求。

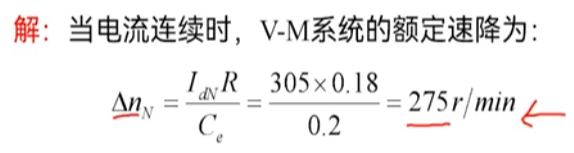
第一小问计算出
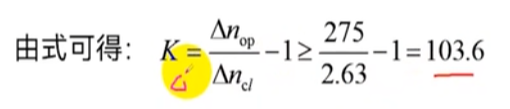
第二小问计算出

现在我们要用闭环控制系统使得DS要求满足,也就是令
又
由开闭环系统参数关系
K是由Kp和Ks构成的,而Ks正好是开环系统的放大倍率,因此只用求Kp:
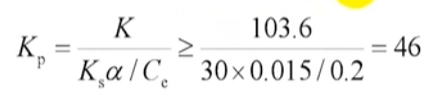
因此只要放大器的增益倍数大于等于46即可满足条件。
作业:
实现一个PID闭环系统,参考链接是这位大佬的,写的非常非常非常好:PID超详细教程------PID原理+串级PID+C代码+在线仿真调参-CSDN博客