前言
github源码:https://github.com/simplefoc/Arduino-FOC/tree/master/src/common
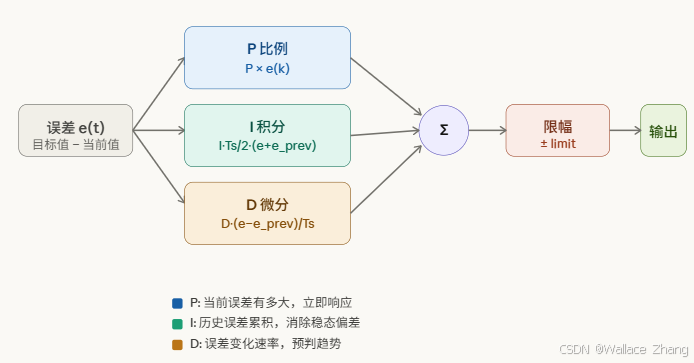
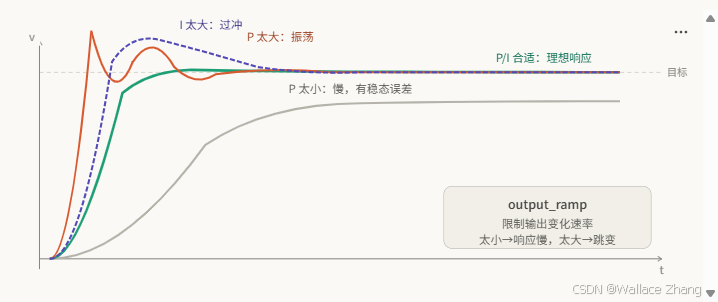
看代码之前,先看一张直觉图:
一、pid.h
cpp
class PIDController
{
public:
/**
*
* @param P - Proportional gain
* @param I - Integral gain
* @param D - Derivative gain
* @param ramp - Maximum speed of change of the output value
* @param limit - Maximum output value
*/
PIDController(float P, float I, float D, float ramp, float limit);
~PIDController() = default;
float operator() (float error);
void reset();
float P; //!< Proportional gain
float I; //!< Integral gain
float D; //!< Derivative gain
float output_ramp; //!< Maximum speed of change of the output value
float limit; //!< Maximum output value
protected:
float error_prev; //!< last tracking error value
float output_prev; //!< last pid output value
float integral_prev; //!< last integral component value
unsigned long timestamp_prev; //!< Last execution timestamp
};pid.h 是头文件,定义了 PIDController 这个类的结构,就像一张设计图纸。
公开成员(外部可以访问):
P, I, D--- 三个增益参数output_ramp--- 输出变化速率的上限limit--- 输出值的绝对上限- 构造函数
PIDController(...)--- 初始化控制器 operator()--- 核心计算函数(调用方式像函数一样:pid(error))reset()--- 重置状态
受保护成员(内部状态,外部不可访问):
error_prev--- 上次的误差output_prev--- 上次的输出integral_prev--- 上次的积分值timestamp_prev--- 上次调用的时间戳
二、pid.cpp
2.1、理解构造函数
cpp
PIDController::PIDController(float P, float I, float D, float ramp, float limit)
: P(P)
, I(I)
, D(D)
, output_ramp(ramp) // output derivative limit [volts/second]
, limit(limit) // output supply limit [volts]
, error_prev(0.0f)
, output_prev(0.0f)
, integral_prev(0.0f)
{
timestamp_prev = _micros();
}这段代码的作用是:接收 5 个参数,把所有"记忆状态"初始化为 0,并记录当前时间戳,为第一次计算做好准备。
2.2、核心函数 operator() 逐行解读
cpp
float PIDController::operator() (float error){
// calculate the time from the last call
unsigned long timestamp_now = _micros();
float Ts = (timestamp_now - timestamp_prev) * 1e-6f;
// quick fix for strange cases (micros overflow)
if(Ts <= 0 || Ts > 0.5f) Ts = 1e-3f;
// u(s) = (P + I/s + Ds)e(s)
// Discrete implementations
// proportional part
// u_p = P *e(k)
float proportional = P * error;
// Tustin transform of the integral part
// u_ik = u_ik_1 + I*Ts/2*(ek + ek_1)
float integral = integral_prev + I*Ts*0.5f*(error + error_prev);
// antiwindup - limit the output
integral = _constrain(integral, -limit, limit);
// Discrete derivation
// u_dk = D(ek - ek_1)/Ts
float derivative = D*(error - error_prev)/Ts;
// sum all the components
float output = proportional + integral + derivative;
// antiwindup - limit the output variable
output = _constrain(output, -limit, limit);
// if output ramp defined
if(output_ramp > 0){
// limit the acceleration by ramping the output
float output_rate = (output - output_prev)/Ts;
if (output_rate > output_ramp)
output = output_prev + output_ramp*Ts;
else if (output_rate < -output_ramp)
output = output_prev - output_ramp*Ts;
}
// saving for the next pass
integral_prev = integral;
output_prev = output;
error_prev = error;
timestamp_prev = timestamp_now;
return output;
}计算时间间隔 Ts:
cpp
unsigned long timestamp_now = _micros();
float Ts = (timestamp_now - timestamp_prev) * 1e-6f;
if(Ts <= 0 || Ts > 0.5f) Ts = 1e-3f; // 防止异常值_micros() 返回微秒,乘以 1e-6 换算成秒。如果时间异常(比如定时器溢出),就用默认值 1ms。
P 比例项
cpp
float proportional = P * error;最简单,直接乘以增益。
I 积分项(Tustin 梯形法)
cpp
float integral = integral_prev + I * Ts * 0.5f * (error + error_prev);
integral = _constrain(integral, -limit, limit); // 防积分饱和用梯形面积来近似积分,比矩形法更精确。_constrain 防止积分无限增大(即"积分饱和")。
D 微分项
cpp
float derivative = D * (error - error_prev) / Ts;误差的变化量除以时间 = 变化速率。
求和 + 限幅
cpp
float output = proportional + integral + derivative;
output = _constrain(output, -limit, limit);输出斜率限制(ramp)
cpp
if(output_ramp > 0){
float output_rate = (output - output_prev) / Ts;
if (output_rate > output_ramp)
output = output_prev + output_ramp * Ts;
else if (output_rate < -output_ramp)
output = output_prev - output_ramp * Ts;
}防止输出跳变过快,比如电机突然全速启动会损坏硬件。
保存状态供下次使用
cpp
integral_prev = integral;
output_prev = output;
error_prev = error;
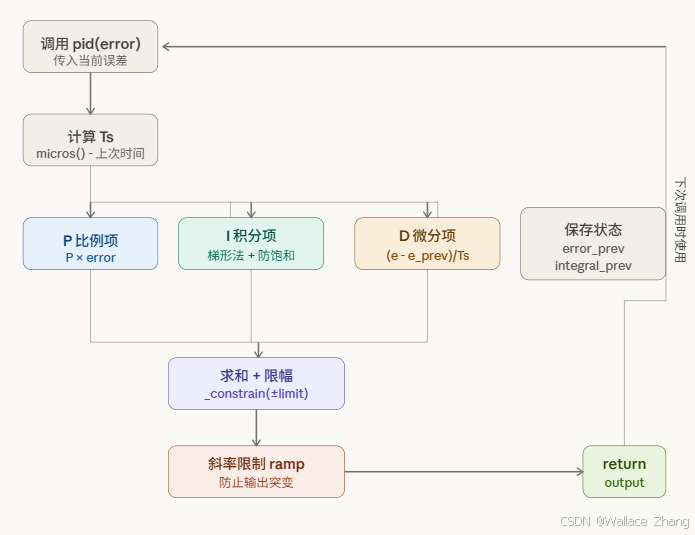
timestamp_prev = timestamp_now;完整数据流动图
总结

2.3、为什么用梯形法?
核心对比是矩形法 vs 梯形法------两者都是用"面积"来近似积分,但精度差别很大。
矩形法(前向欧拉):
cpp
integral = integral_prev + I * Ts * error_prev只用上一步的误差值,相当于用矩形来近似曲线下面积。
梯形法(Tustin / 双线性变换):
cpp
integral = integral_prev + I * Ts * 0.5 * (error + error_prev)同时用这一步和上一步取平均,相当于用梯形来近似面积。
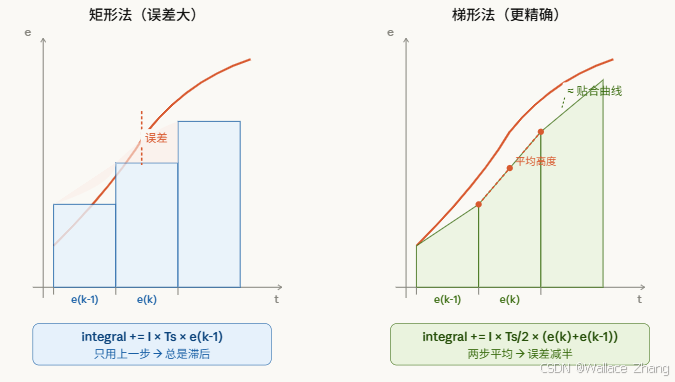
直觉上很清楚:矩形法每一步只用旧值,总是"落后"于真实曲线;梯形法把两端连成斜线,天然地跟曲线贴合得更好。
为什么这在电机控制里特别重要?
梯形法还有一个关键数学性质------它在 s 域(连续)和 z 域(离散)之间的映射是双线性变换(Tustin 变换),保证了:
- 稳定性保持:连续系统稳定,离散化后仍然稳定。矩形法没有这个保证------采样率不够高时可能引入振荡甚至发散。
- 频率特性保真:频率响应的形状被保留,只是略有压缩,不会产生虚假的谐振峰。
- 代价几乎为零 :只是多加了一个
error_prev,乘以0.5f,没有额外的存储或计算负担。
对应代码再看一遍
cpp
// Tustin transform of the integral part
// u_ik = u_ik_1 + I*Ts/2*(ek + ek_1)
float integral = integral_prev + I * Ts * 0.5f * (error + error_prev);注释里直接写了 "Tustin transform",0.5f * (error + error_prev) 就是取两端平均------这就是梯形的高度。
简单说:矩形法便宜但不准,梯形法同样便宜但准得多,所以在嵌入式控制里几乎是默认选择。
三、调节PID
框图:
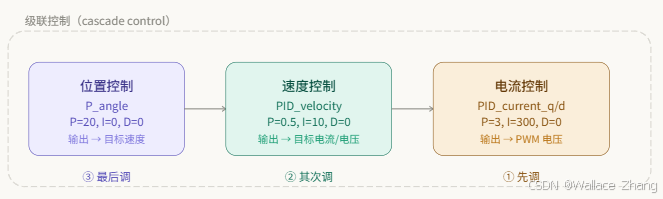
核心原则:从内到外调,内层必须先稳定,外层才有意义。 就是,先调电流环,再调速度环,最后才调位置环。
第一步:调电流环(最内层,最快)
对应代码:PID_current_q 和 PID_current_d,默认值 P=3, I=300, D=0, ramp=0。
电流环响应速度要求最高(kHz 级别),所以 ramp=0(不限速),D=0(噪声太大)。
调法:只有电流传感器时才需要调这层。没有电流传感器就跳过,用电压模式代替。
- 从小 P 开始(比如
P=1),逐渐增大到电流响应变快但不抖动 I消除稳态误差,一般设为P × 100左右(就是代码默认的比例关系)- 如果电流波形振荡,先减
I,再减P
第二步:调速度环(中间层)
对应代码:PID_velocity,默认 P=0.5, I=10, D=0, ramp=1000。注意 D=0 是故意的------速度信号由传感器微分得到,本身已经有噪声,再加 D 会放大噪声导致抖动。
速度环调参步骤:
- 先把
I=0,只用 P。逐渐增大 P 直到速度跟得上目标但还没振荡。 - 加入
I,消除稳态误差(电机在目标速度附近的静差)。I 太大会过冲,适量即可。 output_ramp(默认 1000 V/s)控制输出突变速率。启动保护要求高时调小,想要快速响应时调大。- 配合低通滤波器
LPF_velocity(默认Tf=0.005s)------Tf 越大越平滑但越滞后。
第三步:调位置环(最外层)
对应:P_angle,默认 P=20, I=0, D=0,输出限幅是速度上限 vel_limit=20 rad/s。
位置环只用 P 控制器,这不是偷懒------是因为速度环已经处理了积分(消除稳态误差),位置环加 I 反而容易引起积分饱和导致过冲。
- 从小 P 开始(比如
P=5),逐渐增大到位置跟踪准确但没有过冲 - 调
vel_limit(P_angle.limit)来限制最大运动速度,防止大角度命令让电机猛冲