目录
本系列需要具备 永磁同步电机数学模型全程推导基础。
无感观测器在零低速下无法得到足够高信噪比的信息,一种比较简单的方法就是让电机开环拖动到具有一定速度,再切入观测器。开环拖动固然有很多缺点,比如开环电流效率低、无法重载启动等,但是它的原理比较简单,实现起来比较容易。
V/F
在开环拖动时,随着电机转速升高,转子切割绕组线圈的反电动势越来越大,绕组的电压会越来越多地被反电动势吃掉,导致电机力矩降低而发生失步。因此,需要根据转速升高,额外提高绕组电压(PWM占空比),如何把握"额外提高多少"这个度是有讲究的,给多给少了都会造成电机开环失步,这就是V/F研究的内容。
接下来研究一下用于转矩的q轴电压是如何被反电动势消耗掉的,观察q轴电压方程:
u q = R s i q + L q d i q d t + ω L d i d + ω ψ f u_q=R_si_q+L_q\frac{di_q}{dt}+\omega L_di_d+\omega\psi_f uq=Rsiq+Lqdtdiq+ωLdid+ωψf
开环拖动时,可以认为 d i q d t \frac{di_q}{dt} dtdiq处于稳态是0;完全用q轴进行拖动,即 i d i_d id等于0。于是q轴电压方程可以近似为:
u q = R s i q + ω ψ f u_q=R_si_q+\omega\psi_f uq=Rsiq+ωψf
u q u_q uq是给定的PWM占空比,随着 ω \omega ω增大,如果 u q u_q uq不进行干预, i q i_q iq会越来越小,而转矩与 i q i_q iq直接相关。因此要想让 i q i_q iq保持恒定, u q − ω ψ f u_q-\omega\psi_f uq−ωψf要为常数,如下所示, K , R s K,R_s K,Rs均为常数:
i q = u q − ω ψ f R s = K R s i_q=\frac{u_q-\omega\psi_f}{R_s}=\frac{K}{R_s} iq=Rsuq−ωψf=RsK
于是V/F的 u q u_q uq给定就有了:
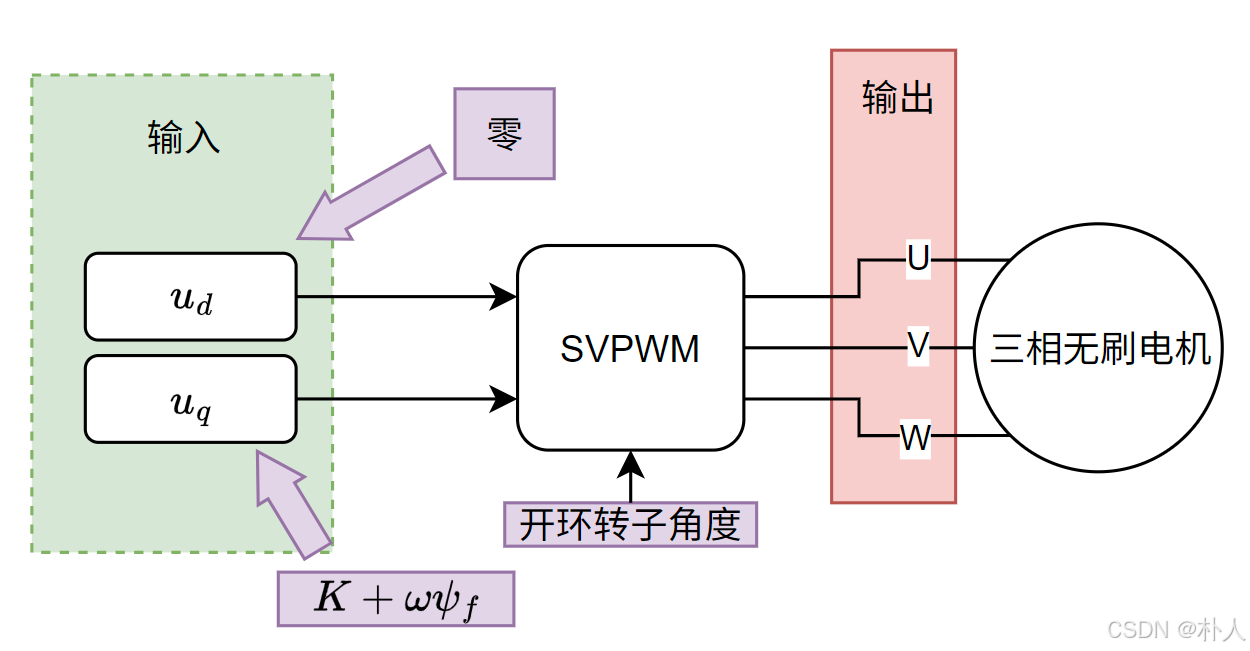
u q = K + ω ψ f u_q=K+\omega\psi_f uq=K+ωψf
从上式可以看出, u q u_q uq是一条直线方程,自变量是 ω \omega ω,斜率是 ϕ f \phi_f ϕf,这也就是V/F取名的由来,即 V f = 斜率常数 = ϕ f \frac{V}{f}=斜率常数=\phi_f fV=斜率常数=ϕf。
K的选择就决定了V/F阶段 i q i_q iq的大小。当然,V/F没有电流环,这里的 i q i_q iq是固定的,稍微有点负载就扛不住 了,或者绕组电阻很小的时候容易过流 。
V/F阶段要逐渐提高转子转速(切入观测器前需要有足够转速),可以让转速随着时间成比例增加,即 ω = ω + a c c ∗ Δ t \omega=\omega+acc*\Delta t ω=ω+acc∗Δt,acc是升速比例,是人工给定的参数。到达一定转速后,即可切入观测器。V/F阶段的转子角度可以通过对转速进行积分得到。
根据上述推导,V/F的框图为:
I/F
V/F方式对于有负载情况下,很难拖动起来,或者绕组电阻小的时候容易过流,因此可以在开环阶段加上电流环,能够适应一定负载和绕组情况,I/F就是基于这个思想的。
I/F的电流环除了转子位置是开环的,其他与有感电流环没有区别:
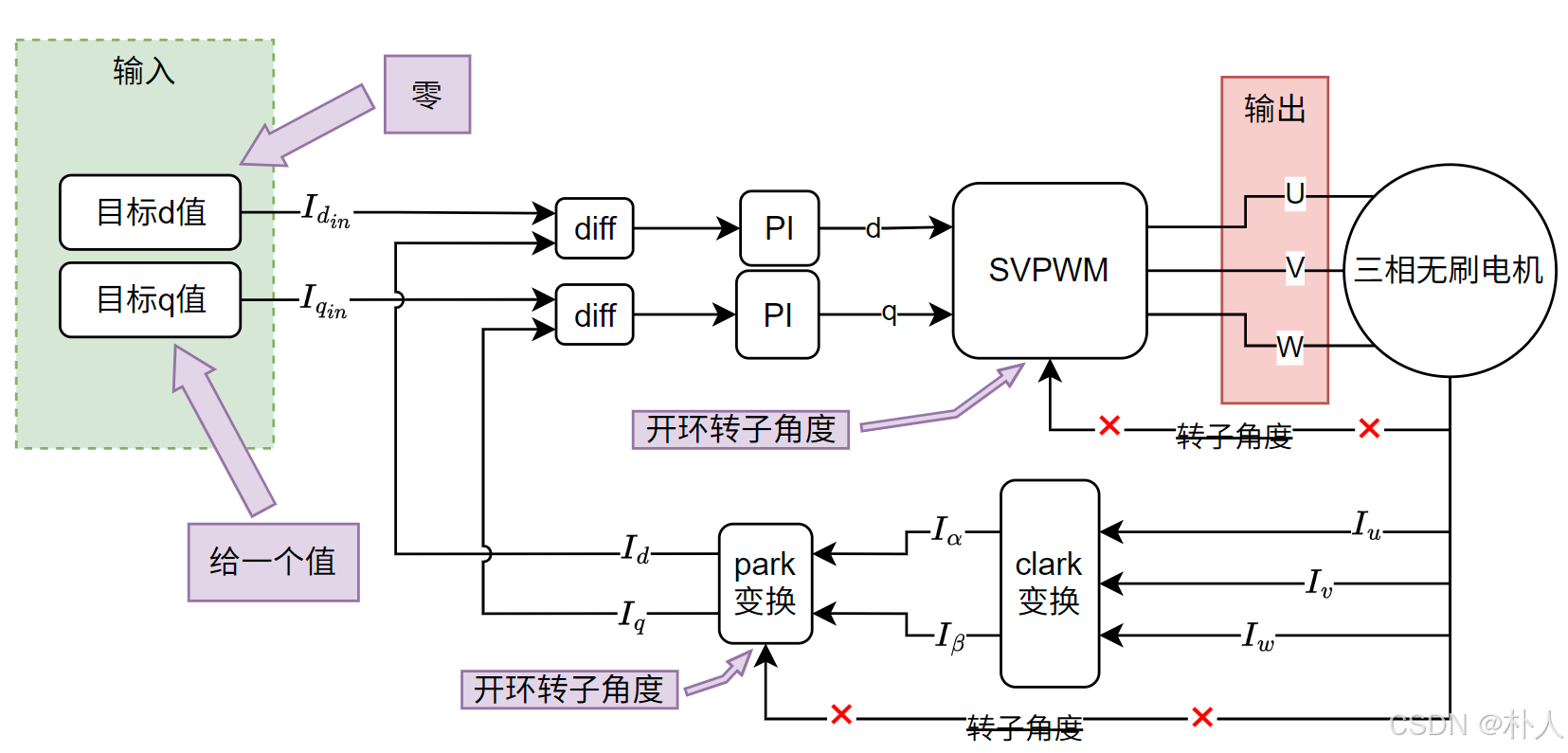
转速和转子角度的计算方式和V/F一致,分别是随着时间成比例增加和通过积分转速得到。
I/F虽然名称结构和V/F一样,但不是说 I F \frac{I}{F} FI是一个常数,这只是命名上的。
总结一下理论推导:V/F目的是为了保持拉力稳定,尽量做到开环拖动时不失步;I/F可以做到有负载时,根据电流采样情况自动提高输出。当然,不管是V/F还是I/F,都是开环拖动,都可能会出现不同程度的发热现象。