参考:
型号配置:
控制板:ESP32
驱动板:SimpleFOC V2.0.3
电机:咸鱼买的2804电机,极对数7,编码器AS5600。link
IDE:Espressif-IDE,3.1.0
ESP-IDE:5.3.1
流程:
硬件部分
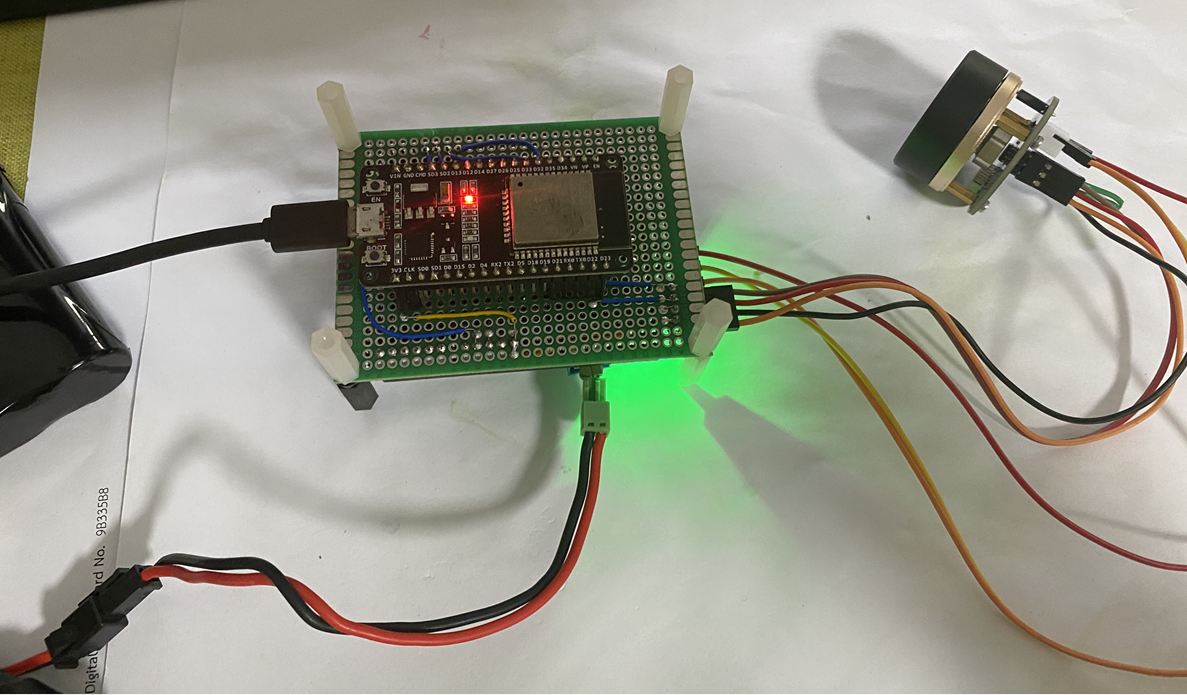
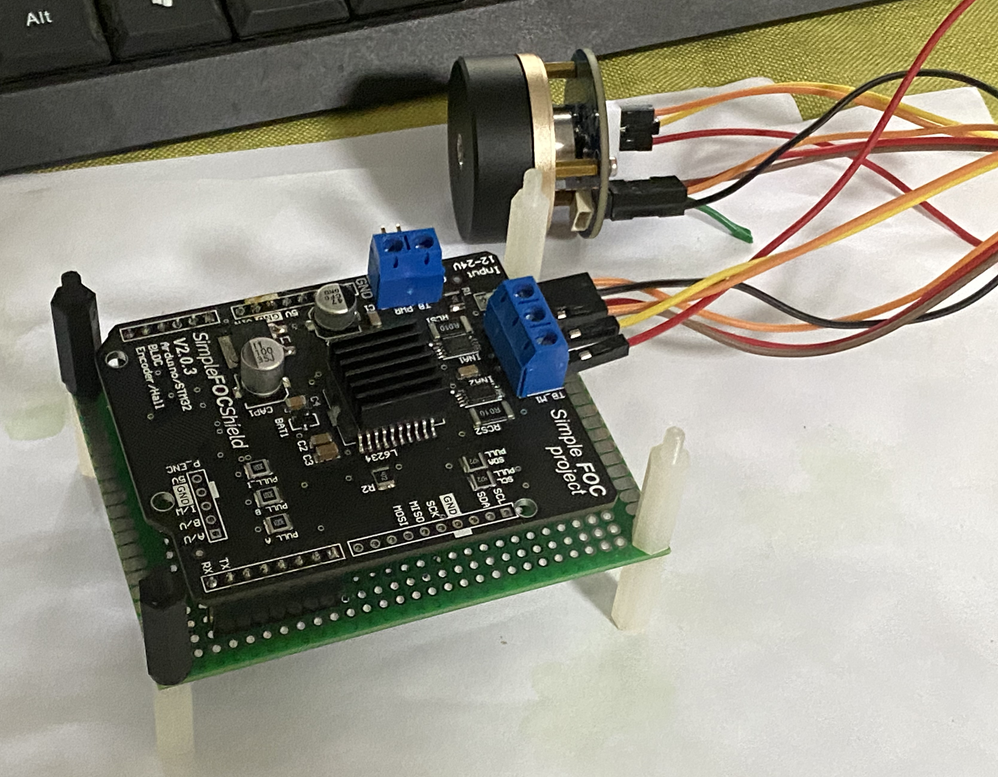
为了可靠连接,控制板和驱动板通过洞洞板焊接连接。由于驱动板是适配Arduino的,引脚布局十分奇葩,无法跟洞洞板对齐,需要拆掉右上引脚。又因为驱动板公针又软又薄,无法跟插座可靠连接,故将驱动板其余引脚全部拆掉,换上结实的插针。将驱动芯片IN2脚与插座pin4口连接。
硬件完成图如下:
软件部分
硬件完成后,编写ESP32控制程序。此步参考视频教程,主要步骤如下:
- 新建一个空白的sample_project。
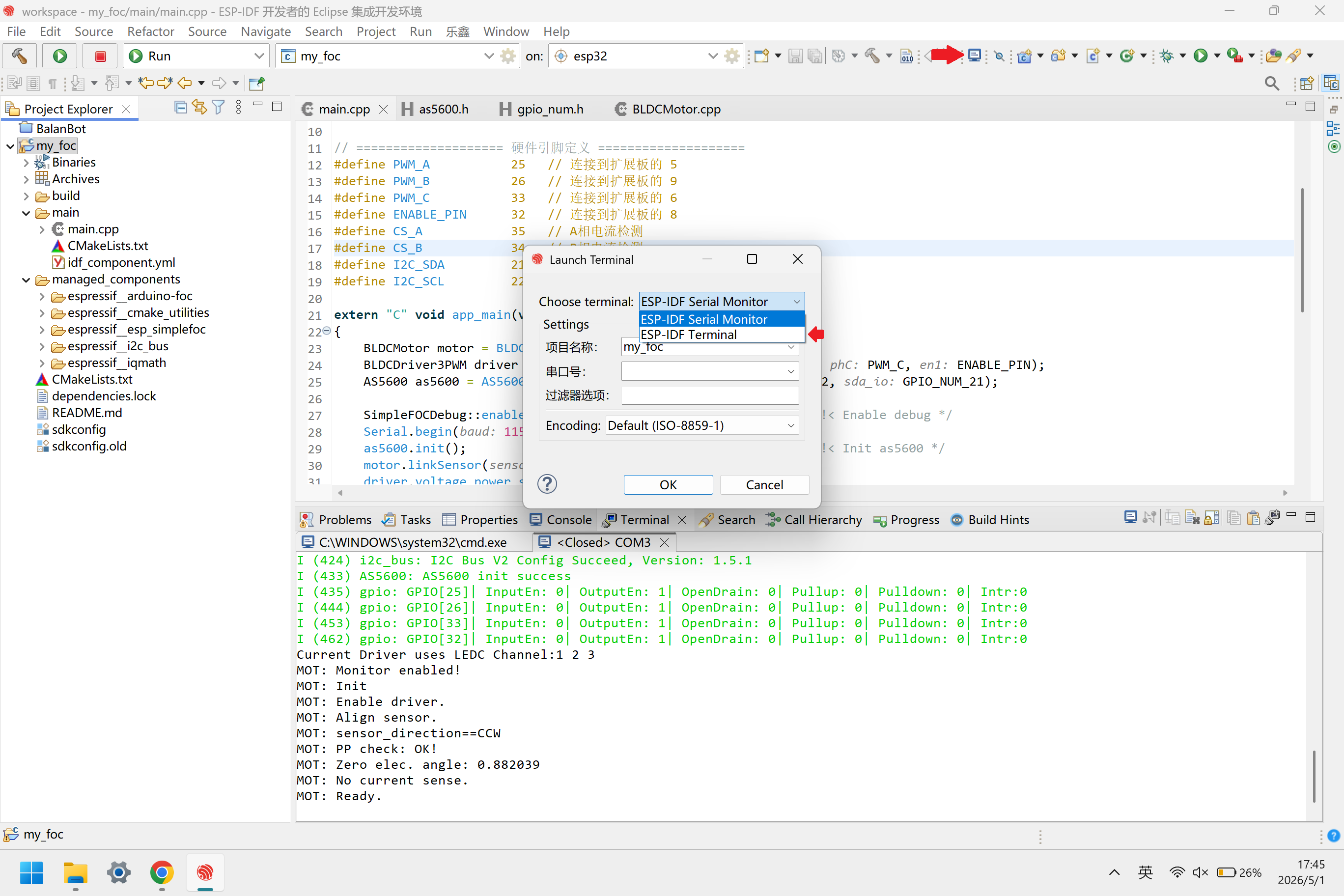
- 打开命令行(见下图)。
- 命令行输入:idf.py add-dependency "espressif/esp_simplefoc^1.2.3"。此步会在main文件夹下创建一个idf_component.yml配置文件。
- 修改main.c为main.cpp,修改CMakeLists.txt。
- 修改sdkconfig,将TICK_RATE_HZ改为1000。
- 执行编译,会将依附程序下载到managed_components文件夹。
此时,编译会报错,因为esp_simplefoc 与 i2c_bus 两个组件版本不兼容:在 ESP-IDF v5.2 及更高版本中,I2C 驱动从旧版 driver/i2c.h 迁移到了新版 driver/i2c_master.h。旧版中使用的 i2c_master_get_bus_handle() 函数在新版驱动中已被移除。
修正方法为将i2c_bus_v2.c中104行到114行,即下述代码,注释掉。
/*if (i2c_master_get_bus_handle(port, &s_i2c_bus[port].bus_handle) == ESP_OK) {
s_i2c_bus[port].is_init = true;
s_i2c_bus[port].conf_activate = *conf;
s_i2c_bus[port].bus_config.i2c_port = port;
s_i2c_bus[port].device_config.scl_speed_hz = conf->master.clk_speed;
s_i2c_bus[port].mutex = xSemaphoreCreateMutex();
I2C_BUS_CHECK(s_i2c_bus[port].mutex != NULL, "i2c_bus xSemaphoreCreateMutex failed", NULL);
s_i2c_bus[port].ref_counter = 0;
ESP_LOGI(TAG, "I2C Bus V2 uses the externally initialized bus handle");
return (i2c_bus_handle_t)&s_i2c_bus[port];
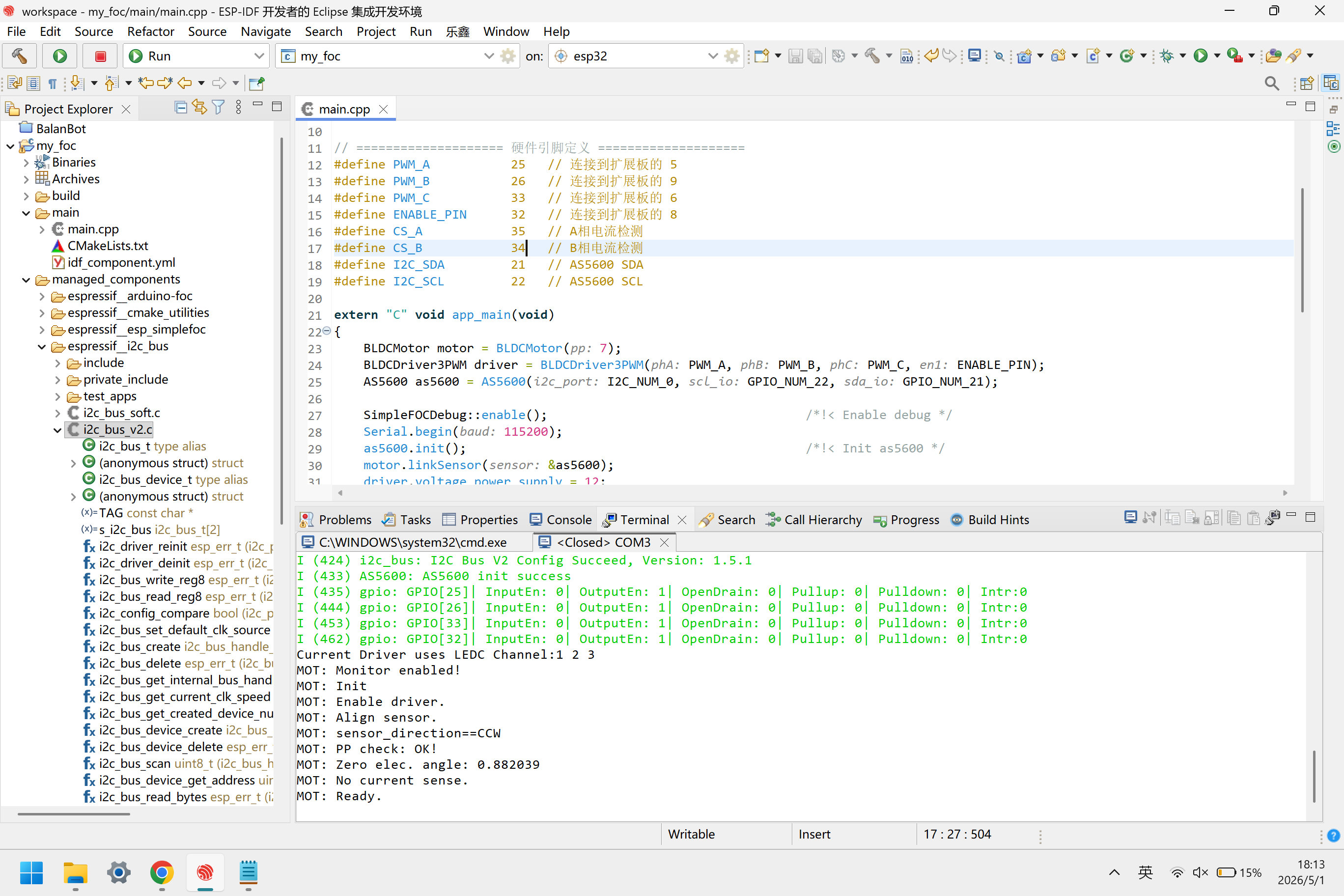
}*/- 编译完成后,按视频内容修改main.cpp内容,修改引脚定义与电机极对数(见下图),再次编译。连接硬件,正常执行,输出见下图: