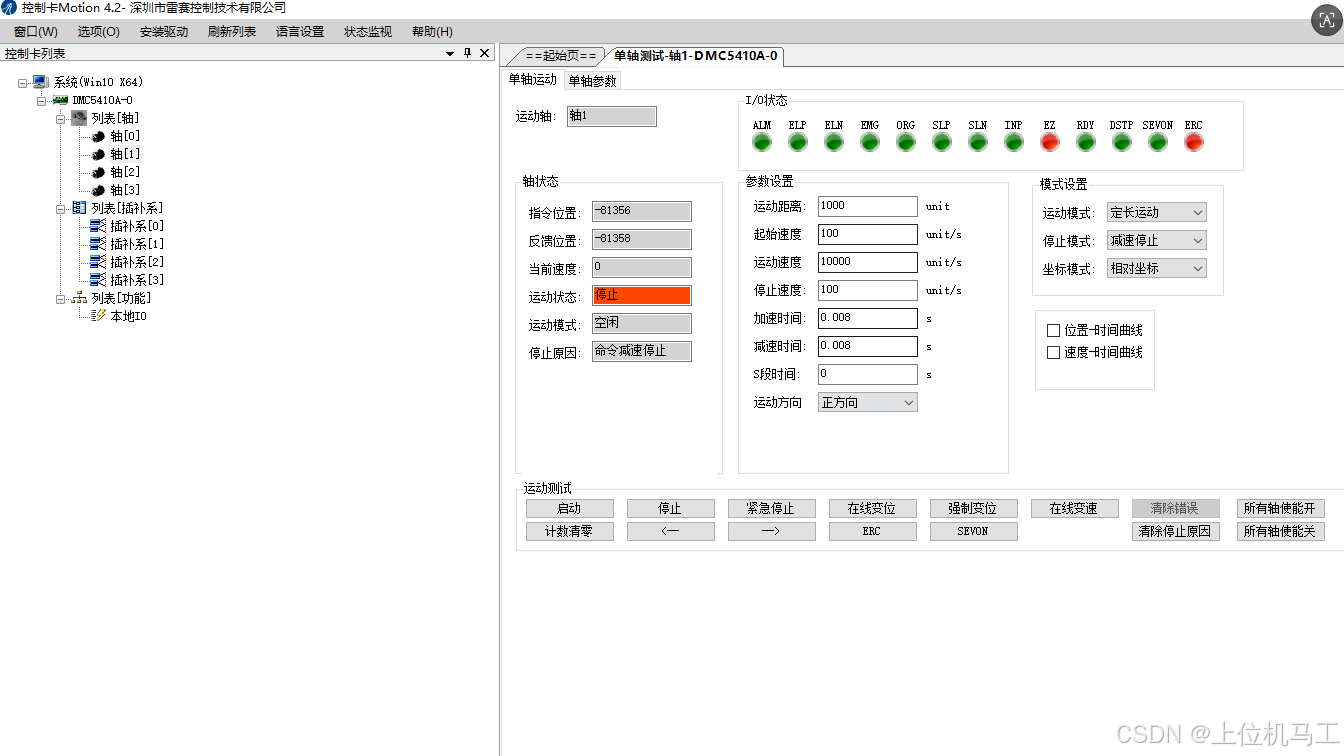
原则是正常状态绿色,不正常是红色。
1、ALM
没有触发是绿色,报警了是红色
2、ELP(正极限)
没有触发是绿色,碰到正极限是红色
3、ELN(负极限)
没有触发是绿色,碰到负极限是红色
4、EMG(急停)
没有触发是绿色,急停按下是红色
5、ORG(原点)
没有触发是绿色,碰到原点传感器是红色
6、SLP(软正极限)
没有触发是绿色,碰到负极限是红色
7、SLN(软负极限)
没有触发是绿色,碰到负极限是红色
8、EZ
没有触发是红色,触发是绿色。
9、SEVON(伺服使能)
不上使能是红色,上了使能是绿色。