文章:Detecting Unknown Objects via Energy-based Separation for Open World Object Detection
代码:暂无
单位:韩国高丽大学、首尔国立大学
一、问题背景
传统目标检测是封闭集模式,只认识训练过的类别,遇到没见过的物体要么乱分类、要么直接忽略。
而开放世界目标检测(OWOD) 要求模型做到三点:
-
incremental 增量学习新类别
-
无监督识别出未知物体
-
用记忆回放缓解灾难性遗忘
但现有方法有两个致命问题:
-
只靠已知类别判断未知,导致未知与背景/已知混淆,漏检严重
-
记忆回放时新旧类别互相干扰,学新类就丢旧知识
二、方法创新
作者提出DEUS框架,核心由两个模块组成,简单好理解:
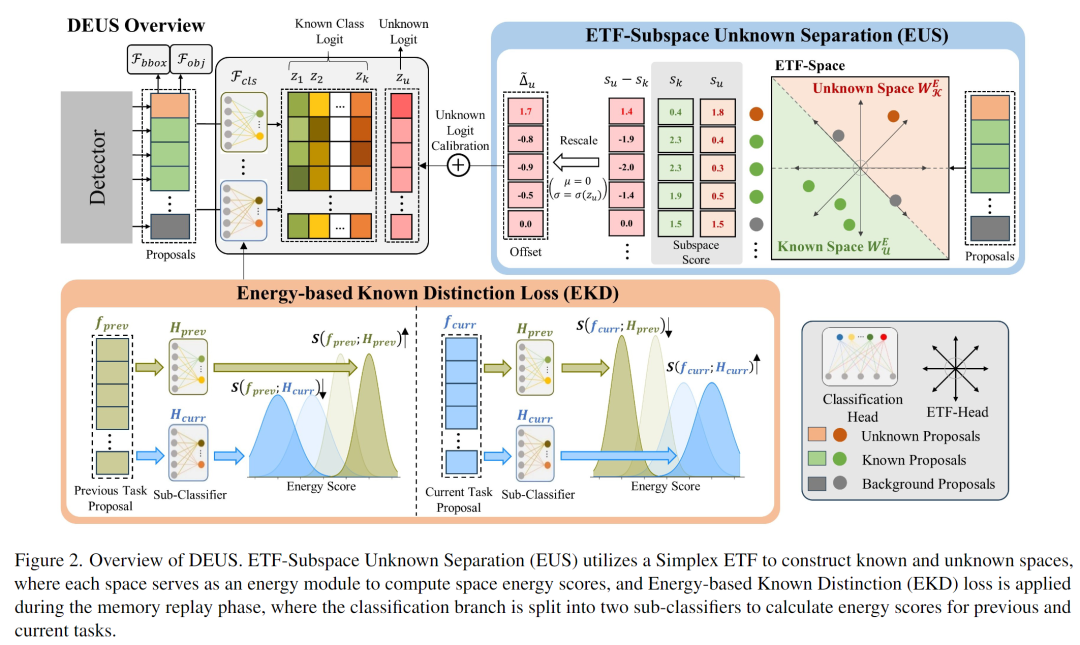
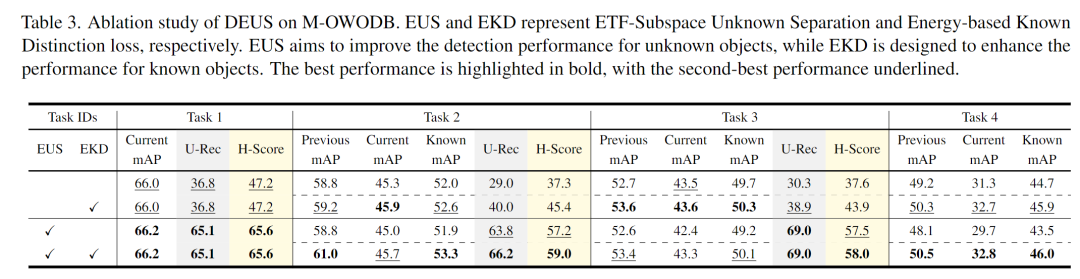
1. ETF子空间未知分离(EUS)
-
用等角紧框架(ETF) 把特征空间拆成已知空间 和未知空间
-
同时计算两个空间的能量分数,让已知、未知、背景各归其位
-
训练时强制拉开已知/未知的能量间隔,推理时校准未知分数
-
解决:未知物体学不到特征、容易和背景混淆的问题
2. 基于能量的已知区分损失(EKD)
-
把分类器拆成旧类别子分类器 和新类别子分类器
-
用能量约束:旧样本只信旧分类器,新样本只信新分类器
-
减少新旧知识互相干扰
-
解决:记忆回放时学新忘旧的问题
总损失 = 分类损失 + 框回归损失 + EUS损失 + EKD损失(仅回放阶段用)
三、实验结果
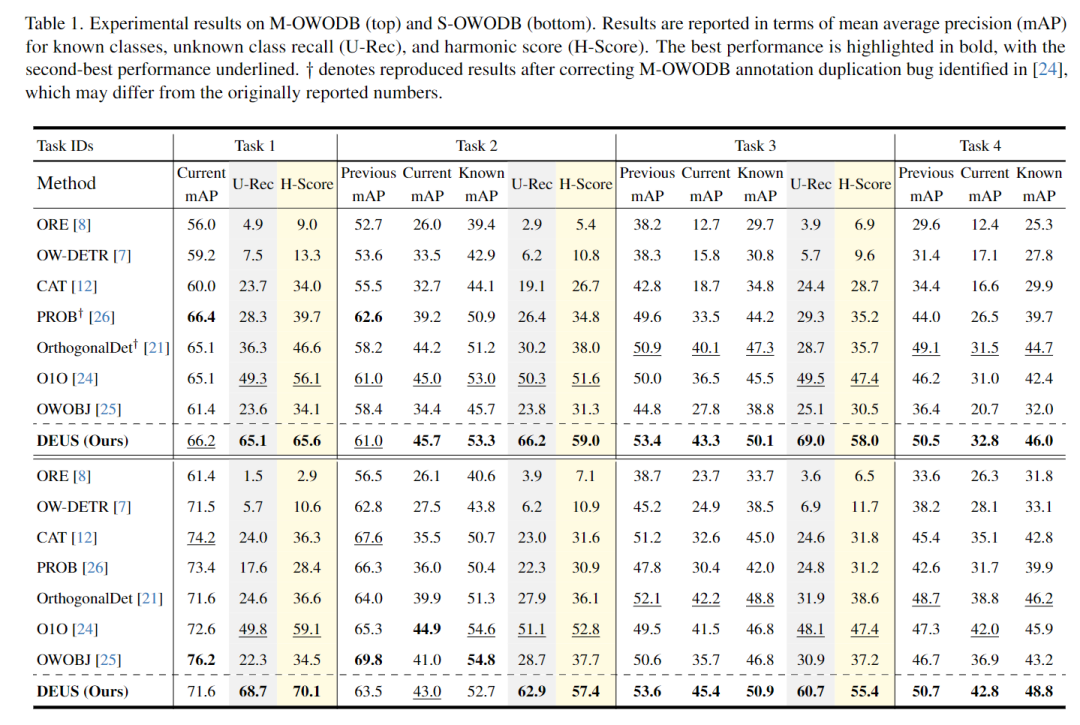
DEUS在三大标准数据集M-OWODB、S-OWODB、RS-OWODB全面屠榜:
-
未知召回率(U-Rec) 大幅领先,Task1最高冲到68.7%
-
已知类别mAP 不掉点,增量学习全程稳定
-
调和均值H-Score 所有任务均为SOTA
-
计算开销极小:推理仅+1.9%,FLOPs仅+0.5%
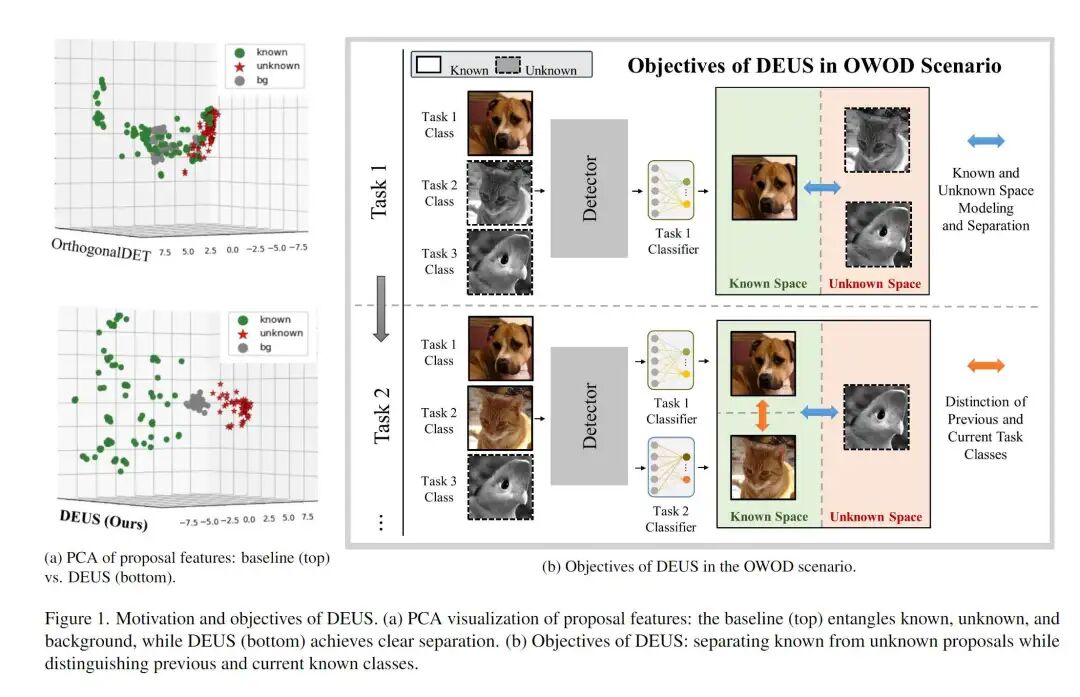
可视化效果更直观:
-
基线把长颈鹿(未知)误判成马,把牛(已知)判成未知
-
DEUS精准框出所有未知,正确识别已知,不漏检
四、优势与局限
优势
-
首次用双ETF子空间+能量建模未知特征,未知检测能力极强
-
EKD损失完美解决记忆回放的新旧干扰问题
-
即插即用,基于MMDetection,轻量无负担
-
自然图像、遥感图像都能打,泛化性强
局限
-
当已知与未知语义高度重叠时,分离效果会下降
-
伪标签质量依然依赖基础检测器的初始能力
五、一句话总结
DEUS用双空间能量分离 搞定未知检测,用新旧分类器解耦 解决灾难性遗忘,在开放世界目标检测上实现未知召回暴涨、已知精度不掉的SOTA效果,轻量好用、落地潜力拉满!