目录
[锅盖噪声抑制模块 :](#锅盖噪声抑制模块 :)
[条纹噪声抑制模块 :](#条纹噪声抑制模块 :)
简介
红外探测器由于制作工艺的缺陷、自身工作温度变换、外部环境影响等原因导致生成的 图像都会带有非均匀性,降低了红外成像质量。
设计思路
基于FPGA核心算法,分为四大校正模块
设计四个模块 锅盖噪声抑制模块、固定模式噪声抑制模块、条纹噪声抑制模块、鬼影噪声抑制模块。
定义说明
锅盖噪声抑制模块 :
在两个不同辐照度下对均匀遮盖片分别获取两个辅助校正图像。根据 辅助校正图像的输出响应,映射待处理图像的校正增益与校正偏移,以此获取锅盖噪声 校正参数。
固定模式噪声抑制模块:
单 点校正法进行设计,将一块均匀挡片遮挡住红外相机镜头,拍下的图像当作辅助校正图 像。最后,通过辅助校正图像的参数映射出待处理图像中的固定模式噪声校正参数。
条纹噪声抑制模块 :
将二维高斯函数作为维纳滤波的核函数,保留图像细节,更好的获取待处理图像 中的高频信息。通过待处理图像中高频信息的行中值、列中值以及图像方差,获取待处 理图像中的条纹噪声信息。
详细原理介绍
锅盖噪声抑制模块:
两点校正法是在传统单点校正模型的理论基础上进行改良与升级而形成的高级 图像处理技术,增加了对红外图像的光学增益进行补偿的校正方案,校正效果相对较好。
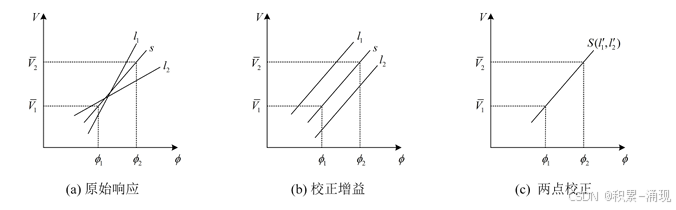
由于在同一光辐射下的响应一致,所以可以将非均匀性噪声,简单的看成加性与乘 性噪声。在实际操作过程中,为了尽可能降低随机噪声的影响及提升校正数据的信噪比, 会对某一特定温度下的黑体辐射源的多帧图像数据进行连续采集,通过对这些数据采集 序列进行算术平均处理,期望得到一个更为稳定且可靠的温度响应基准值,确保在后续 的图像校正过程中,能够获得更高质量的校正效果。当辐射为φL 与φH 时,探测器像元输 出响应( )φ ij L V , ( )φ ij H V的校正为平均信号( )φ′ij V,
红外图像外围区域与中心区域的分布呈现出明显的不均衡性,为抑制该噪声,该模块以 两点校正法为基础进行设计。
固定模式噪声抑制模块
在DeShade 模块工作前,在两个不同辐照度下对黑色均匀遮盖片分别获取两个辅助 校正图像shade_0和shade_1,根据 shade_0和shade_1获得输出响应差参数sh与平均输 出响应差参数。
在设计的DeShade模块中,首先,将输入的待处理红外图像经过以滤波核为-1, 1 的普通二维滤波,即与-1, 1数组进行卷积运算。以此突出图像中的水平边缘,如果图 像右侧的像素强度大于左侧的像素强度,则输出正值;如果左侧的像素强度大于右侧的 像素强度,则输出负值。
接着,将辅助校正图像shade_0与细节加强后的图像进行点乘,获得的图像补偿系 数记作m;将辅助校正图像shade_1与细节加强后的图像进行点乘,获得的图像补偿系 数记作n。 最后,通过两个不同辐照度下辅助校正图像得到的图像补偿系数,进而优化出待处 理红外图像的校正偏移与校正增益。若当前校正偏移与校正增益为首次更新时,则当前 红外图像的校正增益beta即为整个系统的校正增益alphaSh_1。