目录
1.摘要
针对移动机器人兼顾路径长度、安全性与平滑度多目标规划需求,本文提出一种学习驱动人工蜂群算法(LBABC),其利用竞争策略初始化多样化种群,融合定制的差分进化算子以强化全局搜索,同时引入基于Q学习算子选择机制提升局部开采精度。多场景对比实验与消融分析证实,LBABC在HV和反世代距离IGD等指标上较现有主流算法实现了显著突破,展现出处理复杂多目标路径规划问题的优异性能。
2.多目标路径规划
路径编码

针对具备坐标属性的二维环境,本文采用变长坐标序列进行路径编码。空间内的任意节点定义为 p i = ( x i , y i ) p_i=(x_i,y_i) pi=(xi,yi),一条完整的路径 ζ \zeta ζ则由起点 p 0 p_0 p0、可变数量的 n n n个中间节点以及终点 p n + 1 p_{n+1} pn+1依次连接构成,该节点列表的数学表示为:
ζ = ( p 0 , p 1 , ... , p n , p n + 1 ) \zeta=(p_0,p_1,\ldots,p_n,p_{n+1}) ζ=(p0,p1,...,pn,pn+1)
路径目标
路径长度:
f l e n g t h ( ζ ) = ∑ i = 0 n d ( P i , P i + 1 ) f_{length}(\zeta) = \sum_{i=0}^{n} d(P_i, P_{i+1}) flength(ζ)=i=0∑nd(Pi,Pi+1)
安全性指标:
f s a f e t y ( ζ ) = − min 0 ≤ i ≤ n min 1 ≤ j ≤ m { M i n d i s t a n c e ( P i , P i + 1 , O j ) } f_{safety}(\zeta) = -\min_{0 \leq i \leq n} \min_{1 \leq j \leq m} \{Mindistance(P_i, P_{i+1}, O_j)\} fsafety(ζ)=−0≤i≤nmin1≤j≤mmin{Mindistance(Pi,Pi+1,Oj)}
平滑度:
f s m o o t h n e s s ( ζ ) = max i = 1 , ... , n π − a ( P i − 1 , P i , P i + 1 ) f_{smoothness}(\zeta) = \max_{i=1,\dots,n} \\pi - a(P_{i-1}, P_i, P_{i+1}) fsmoothness(ζ)=i=1,...,nmaxπ−a(Pi−1,Pi,Pi+1)
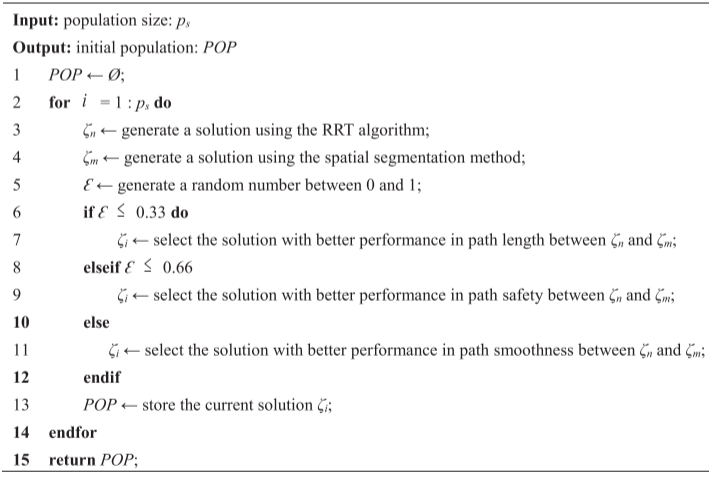
3.学习驱动人工蜂群算法
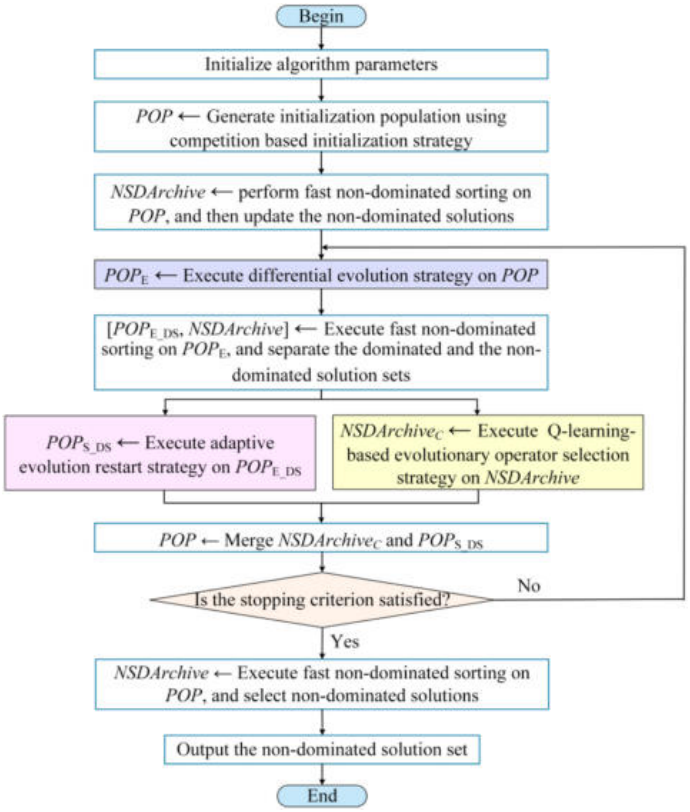
针对传统人工蜂群算法在离散栅格地图中随机初始化易产生劣质或不可行解的缺陷,本文引入了一种竞争初始化策略,该机制以等概率竞争的方式融合了空间分割法与RRT算法,前者通过生成具有明确方向性的路径来保障局部连通性,后者则致力于在构型空间中构建无碰撞且分布广泛的轨迹以拓宽全局探索范围。
为提升帕累托前沿的分布质量,算法基于Q学习进行策略选择,若新生成的解能够支配原解、两者互不支配或原解支配新解,系统将分别赋予正向、中性或负向反馈:
r t = { 1 i f ( ζ o l d ≺ ζ n e w ) 0 i f ( ζ o l d ≃ ζ n e w ) − 1 i f ( ζ n e w ≺ ζ o l d ) r_t=\begin{cases}1&\mathrm{if}(\zeta_{old}\prec\zeta_{new})\\0&\mathrm{if}(\zeta_{old}\simeq\zeta_{new})\\-1&\mathrm{if}(\zeta_{new}\prec\zeta_{old})&\end{cases} rt=⎩ ⎨ ⎧10−1if(ζold≺ζnew)if(ζold≃ζnew)if(ζnew≺ζold)
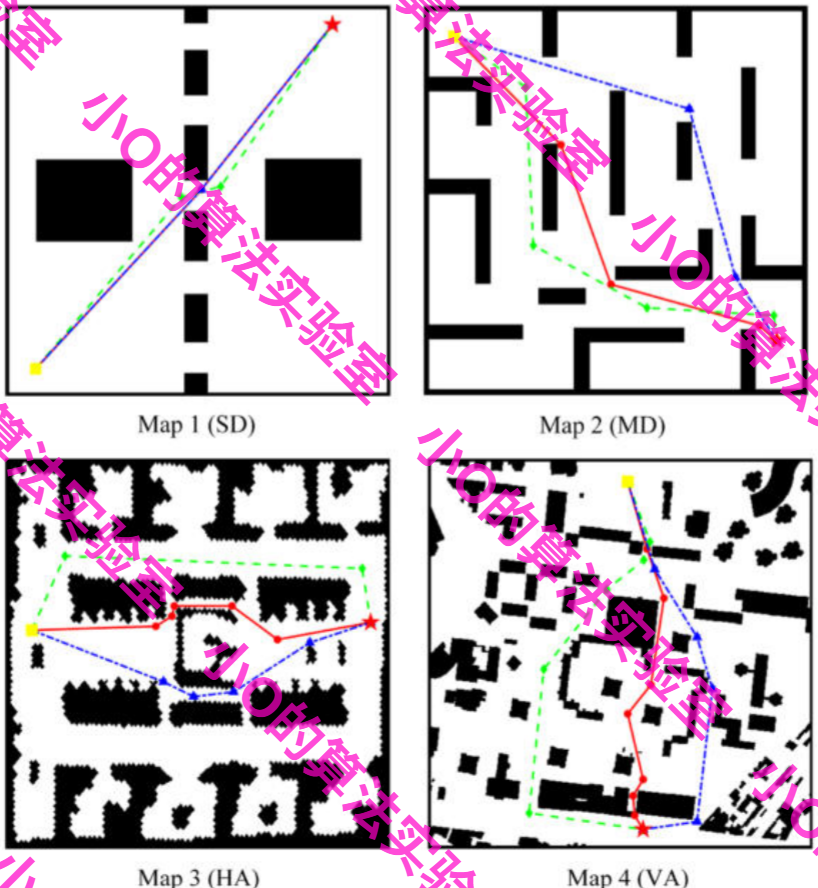
4.结果展示
5.参考文献
Ye F, Duan P, Meng L, et al. A learning-driven artificial bee colony algorithm for mobile robot multi-objective path planningJ. Applied Soft Computing, 2026: 114692.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx