二、算法原理
2.1 整体思路
初始定位:用户提供起始经纬度范围(矩形框),程序将其转换为图像像素坐标,作为追踪的初始目标框。
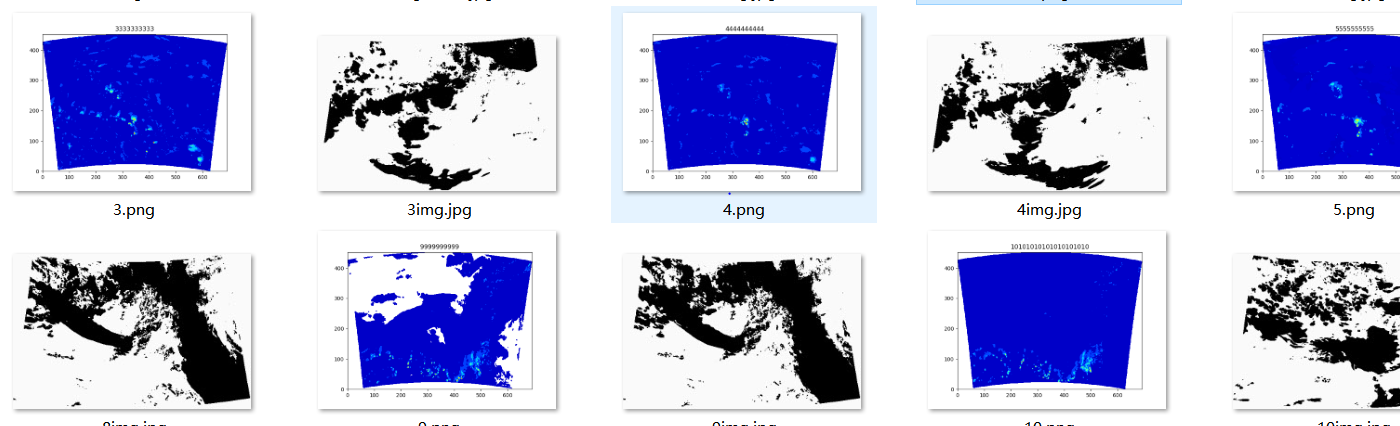
逐帧追踪:利用 OpenCV 的 MIL(Multiple Instance Learning)追踪器 对后续时次的云顶图进行目标跟踪,获取每一帧中云块的位置矩形。
轮廓提取与质心计算:在追踪到的矩形区域内,通过阈值分割提取云顶高大于 210(单位:0.1K?实际为灰度值)的连通区域,找出最大面积轮廓,计算其几何质心。
坐标转换与速度计算:将像素质心转换为经纬度,利用大圆距离计算相邻时次间的位移,最终得到平均移速(km/h)和移动轨迹点。
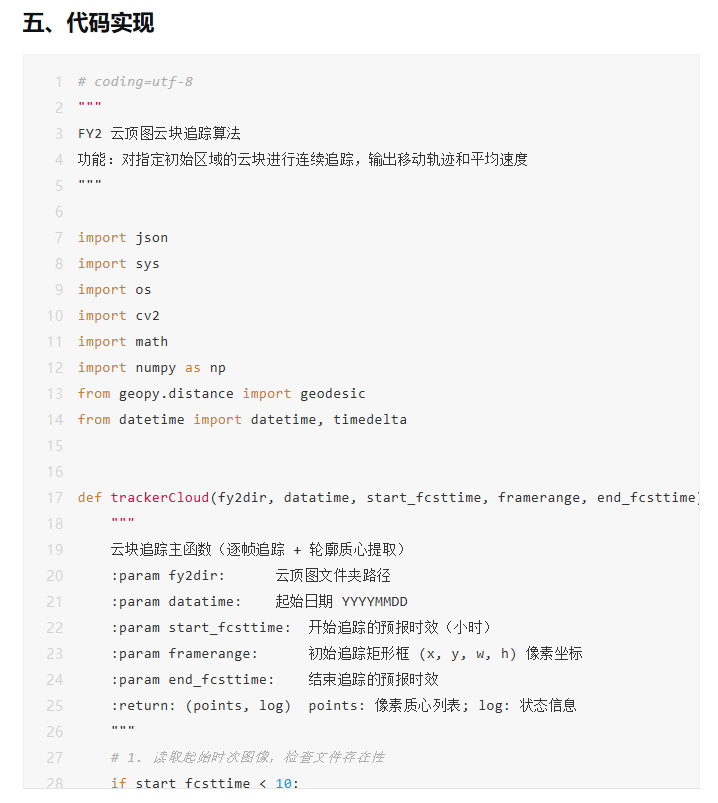
观看 详细文章和获取完整代码请点击 基于 OpenCV 的 FY2 云顶图云块追踪算法实现