在很多工程问题中,我们并不是直接计算目标结果,而是根据观测数据去反推系统状态。例如室内定位、无线感知乃至医学成像,本质上都属于"反问题"(Inverse Problem)。这类问题通常具有一个共同特点:正向过程可以通过物理模型准确描述,但反向求解往往是非线性且对噪声敏感的。
本文分析的 MATLAB 项目构建了一个完整的仿真框架,从磁偶极子建模出发,经过信号传播、环境衰减、噪声叠加,再到信号解调与位置反演,最终形成一个闭环系统。这种"从物理到算法"的结构,比单一算法实现更接近真实工程系统。
一、磁偶极子模型:信号源的物理基础
在自由空间中,磁偶极子产生的磁场可以表示为:
B(r)=μ04π⋅3(m⋅r^)r^−mr3 \mathbf{B}(\mathbf{r}) = \frac{\mu_0}{4\pi} \cdot \frac{3(\mathbf{m}\cdot \hat{\mathbf{r}})\hat{\mathbf{r}} - \mathbf{m}}{r^3} B(r)=4πμ0⋅r33(m⋅r^)r^−m
其中:
r^=r∣r∣,r=∣r∣ \hat{\mathbf{r}} = \frac{\mathbf{r}}{|\mathbf{r}|}, \quad r = |\mathbf{r}| r^=∣r∣r,r=∣r∣
该模型最重要的特性是:
∣B∣∝1r3 |\mathbf{B}| \propto \frac{1}{r^3} ∣B∣∝r31
这意味着磁场强度随着距离快速衰减,从而使不同位置的信号具有明显差异,这正是定位可行的基础。
对应代码实现如下:
matlab
r = R(:,k) - tx_pos;
rn = norm(r);
rhat = r / rn;
m = m_Am2(:,k);
mdotr = dot(m, rhat);
B(:, k) = c * ((3 * mdotr * rhat - m) / (rn^3));二、接收模型:从磁场到电压信号
在实际系统中,接收端通过线圈感应磁场变化产生电压。其幅值为:
Vamp=N⋅A⋅ω⋅∣B⋅n^∣ V_{\text{amp}} = N \cdot A \cdot \omega \cdot |\mathbf{B} \cdot \hat{\mathbf{n}}| Vamp=N⋅A⋅ω⋅∣B⋅n^∣
对应的时间信号为:
V(t)=Vampcos(ωt+ϕ) V(t) = V_{\text{amp}} \cos(\omega t + \phi) V(t)=Vampcos(ωt+ϕ)
代码实现:
matlab
B_parallel = dot(B0_T(:), axis_hat);
Vamp = n_turns * area_m2 * omega * abs(B_parallel);
V = Vamp * cos(omega * t_s + omega_phase_rad);这一阶段完成了从空间磁场到时间信号的转换。
三、传播与环境建模:墙体与障碍物
在实际环境中,信号传播会受到材料影响。项目中采用指数衰减模型:
T=exp(−d⋅πμσf) T = \exp\left(-d \cdot \sqrt{\pi \mu \sigma f}\right) T=exp(−d⋅πμσf )
代码如下:
matlab
T = exp(-d_m .* sqrt(pi .* mu .* sigma_Sm .* f_Hz));对于复杂环境,还可以引入经验修正:
Twall=Tα T_{\text{wall}} = T^{\alpha} Twall=Tα
在多节点场景中,链路衰减表示为:
Tij=Tbase⋅exp(−Δij) T_{ij} = T_{\text{base}} \cdot \exp(-\Delta_{ij}) Tij=Tbase⋅exp(−Δij)
四、噪声建模:测量误差
系统中采用加性高斯白噪声模型:
y=x+n,n∼N(0,σ2) y = x + n, \quad n \sim \mathcal{N}(0, \sigma^2) y=x+n,n∼N(0,σ2)
代码实现:
matlab
noisy_signal = signal + noise;噪声的引入使问题更加接近真实情况,同时也增加了反演难度。
五、IQ 解调:信号幅值恢复
接收信号经过 IQ 解调恢复幅值:
I(t)=v(t)cos(ωt),Q(t)=−v(t)sin(ωt) I(t) = v(t)\cos(\omega t), \quad Q(t) = -v(t)\sin(\omega t) I(t)=v(t)cos(ωt),Q(t)=−v(t)sin(ωt)
A(t)=2I2(t)+Q2(t) A(t) = 2\sqrt{I^2(t) + Q^2(t)} A(t)=2I2(t)+Q2(t)
最终取平均:
A=1T∫A(t),dt A = \frac{1}{T} \int A(t),dt A=T1∫A(t),dt
对应代码:
matlab
I_mix = v .* cos(omega * t_s);
Q_mix = v .* (-sin(omega * t_s));
I = filter(1 - a, [1, -a], I_mix);
Q = filter(1 - a, [1, -a], Q_mix);
env = 2 * sqrt(I.^2 + Q.^2);
mag = mean(env(n0:end));六、定位反演:非线性最小二乘
定位问题可以表示为:
minx∣y∗meas−y∗pred(x)∣2 \min_{\mathbf{x}} \left| \mathbf{y}*{\text{meas}} - \mathbf{y}*{\text{pred}}(\mathbf{x}) \right|^2 xmin∣y∗meas−y∗pred(x)∣2
代码实现:
matlab
fun = @(u) residualRx(u, tx_pos, tx_moment, P, obstacles, meas);
[u_hat, resnorm] = lsqnonlin(fun, u0, lb, ub, opts);残差定义:
r=y∗meas−y∗pred(x) \mathbf{r} = \mathbf{y}*{\text{meas}} - \mathbf{y}*{\text{pred}}(\mathbf{x}) r=y∗meas−y∗pred(x)
七、仿真系统界面与场景展示
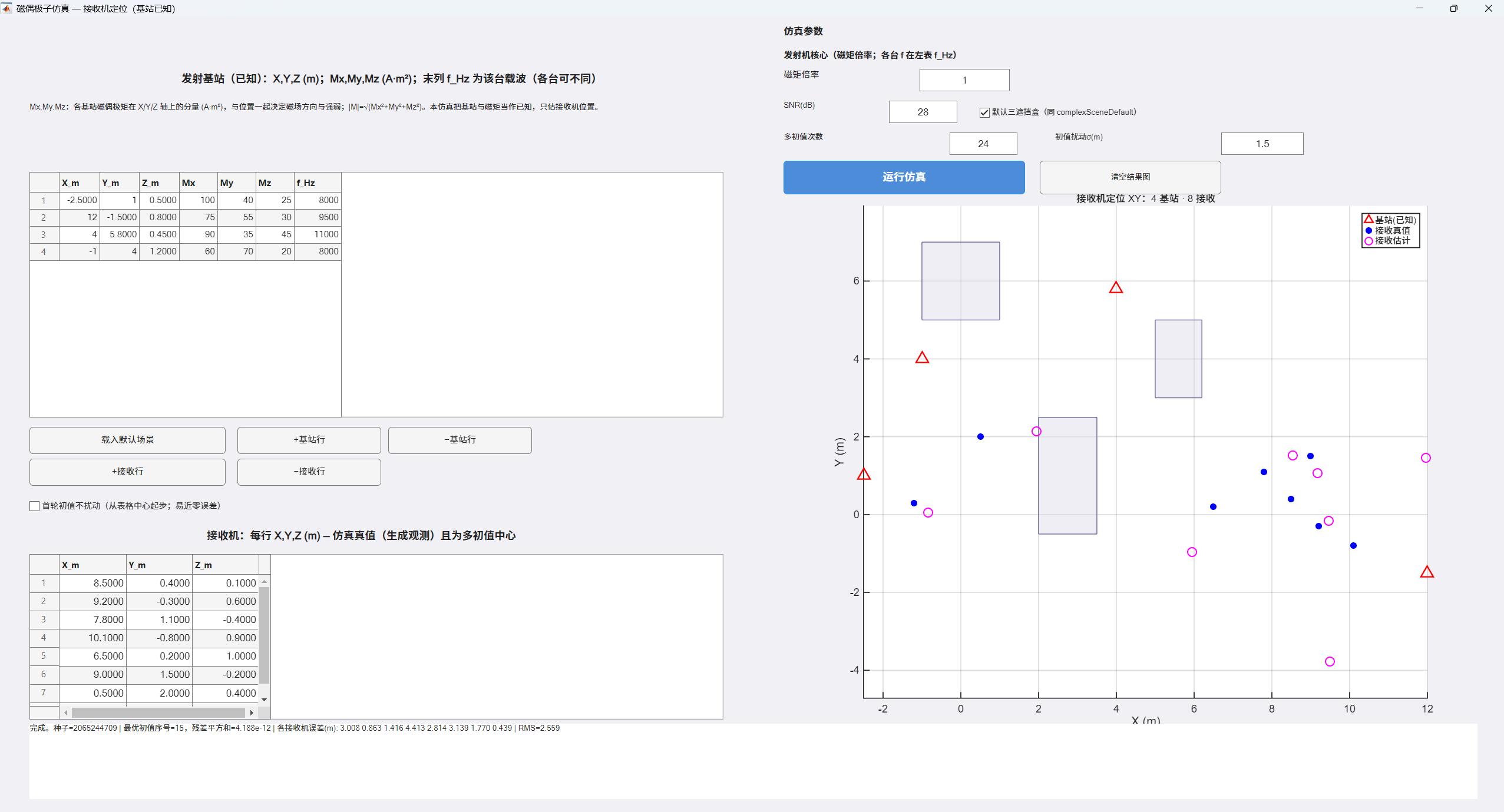
该图展示了完整仿真场景,包括:
- 红色三角:基站(已知)
- 蓝色点:接收机真实位置
- 紫色圈:估计位置
- 灰色区域:障碍物
可以看到系统支持多基站、多接收机以及复杂环境建模。
八、定位结果与误差分析
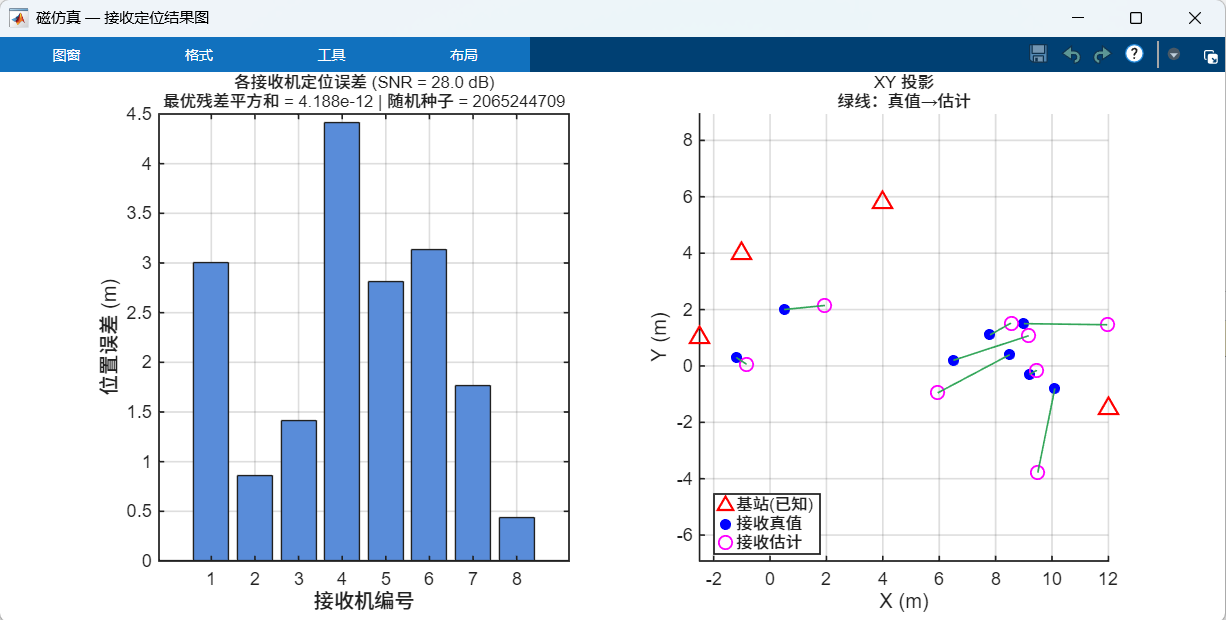
左图为定位误差:
ei=∣xiest−xitrue∣ e_i = |\mathbf{x}_i^{\text{est}} - \mathbf{x}_i^{\text{true}}| ei=∣xiest−xitrue∣
右图为定位结果对比:
ei=xiest−xitrue \mathbf{e}_i = \mathbf{x}_i^{\text{est}} - \mathbf{x}_i^{\text{true}} ei=xiest−xitrue
可以观察到:
- 误差大致在 2∼3.5,m2 \sim 3.5,\text{m}2∼3.5,m 范围
- 障碍物附近误差更大
- 几何结构对结果影响明显
九、结果分析与系统特性
从实验结果可以总结出几个关键结论:
1. 距离非线性影响显著
∣B∣∝1r3 |\mathbf{B}| \propto \frac{1}{r^3} ∣B∣∝r31
导致远距离区域定位更困难。
2. 优化问题非线性
minx∣y∗meas−y∗pred(x)∣2 \min_{\mathbf{x}} |\mathbf{y}*{\text{meas}} - \mathbf{y}*{\text{pred}}(\mathbf{x})|^2 xmin∣y∗meas−y∗pred(x)∣2
存在局部最优问题,因此需要多初值策略。
3. 环境建模决定精度上限
T=exp(−dπμσf) T = \exp\left(-d \sqrt{\pi \mu \sigma f}\right) T=exp(−dπμσf )
模型误差会直接影响最终定位结果。
十、总结
该项目构建了一个完整的工程闭环:
正向过程:
Dipole→Field→Voltage→Signal \text{Dipole} \rightarrow \text{Field} \rightarrow \text{Voltage} \rightarrow \text{Signal} Dipole→Field→Voltage→Signal
反向过程:
Signal→Position Estimation \text{Signal} \rightarrow \text{Position Estimation} Signal→Position Estimation
它不仅展示了磁场建模与定位反演之间的关系,也体现了物理建模、信号处理与优化算法之间的紧密联系,是一个非常典型且具有参考价值的仿真系统。