端点检测
好的,我们来详细解释一下语音端点检测的原理。
语音端点检测原理详解
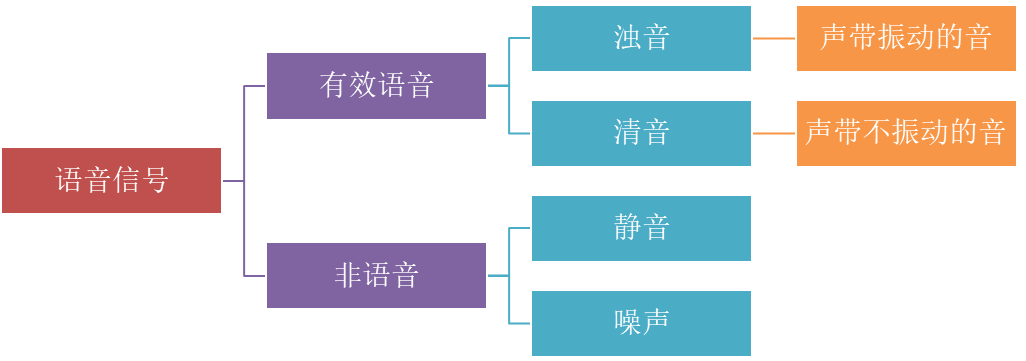
语音端点检测是语音信号处理中的一项基础技术,其核心目标是准确地定位一段录音信号中语音段的起始点 和终止点 ,即区分出语音段和非语音段(如静音、背景噪声)。它在语音识别、语音增强、说话人识别等系统中扮演着至关重要的前置角色,能有效提高后续处理的效率和准确性。
核心原理
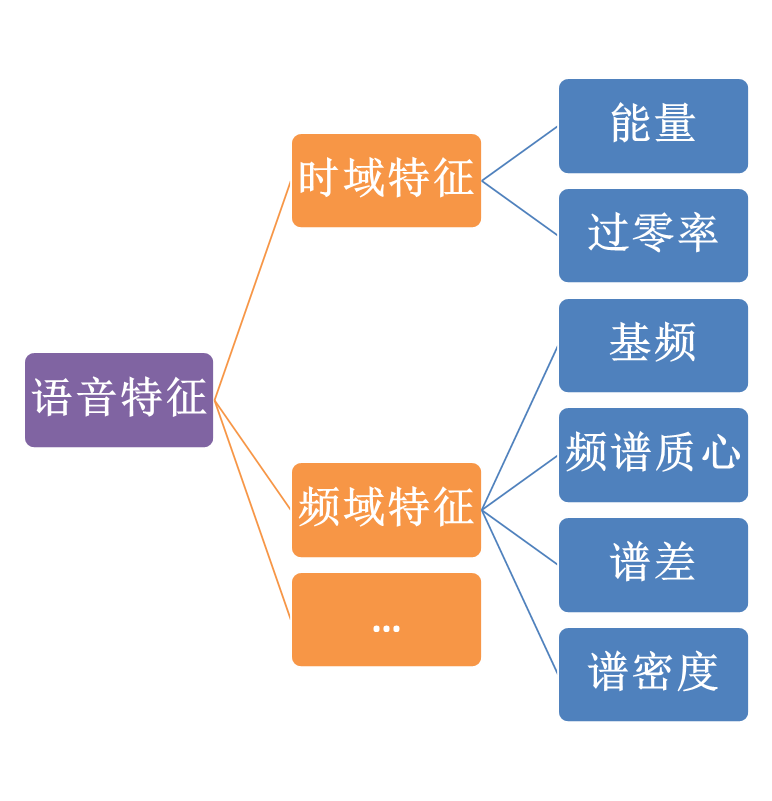
其基本原理在于利用语音信号 和非语音信号 在时域 和频域 上的显著统计特性差异:
-
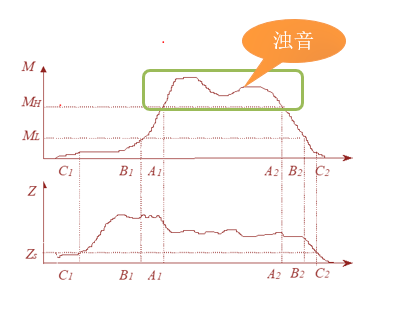
能量特征差异:
- 语音段(特别是元音和浊辅音)通常具有较高的能量(振幅)。
- 静音段或背景噪声段的能量通常较低且相对平稳。
- 因此,计算信号的短时能量 是端点检测最常用、最基础的判据之一。定义短时能量 E n E_n En 为:
E n = 1 N ∑ m = − ∞ ∞ x ( m ) w ( n − m ) 2 E_n = \frac{1}{N} \sum_{m=-\infty}^{\infty} x(m)w(n-m)^2 En=N1m=−∞∑∞x(m)w(n−m)2
其中 x ( m ) x(m) x(m) 是语音信号, w ( n − m ) w(n-m) w(n−m) 是窗函数(如汉明窗), N N N 是窗长。当 E n E_n En 超过某个预设的能量阈值时,可能表示语音开始。
-
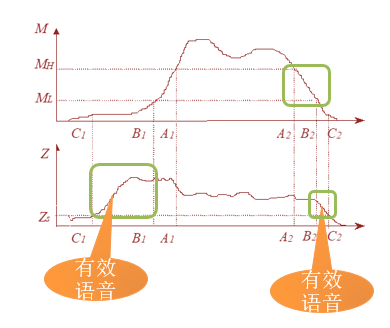
过零率特征差异:
- 过零率指信号波形穿过零电平轴的次数。单位时间内过零的次数。
- 清音(如 /s/, /f/)和背景噪声通常具有较高的过零率。
- 浊音(如元音)和静音段的过零率较低。
- 因此,结合短时过零率 Z n Z_n Zn 可以辅助区分清音和静音/背景噪声。定义 Z n Z_n Zn 为:
Z n = 1 2 N ∑ m = − ∞ ∞ ∣ sgn x ( m ) − sgn x ( m − 1 ) ∣ w ( n − m ) Z_n = \frac{1}{2N} \sum_{m=-\infty}^{\infty} |\text{sgn}x(m) - \text{sgn}x(m-1)| w(n-m) Zn=2N1m=−∞∑∞∣sgnx(m)−sgnx(m−1)∣w(n−m)
其中 sgn ⋅ \text{sgn}\\cdot sgn⋅ 是符号函数。高过零率可能表示清音或噪声。
-
频谱特征差异:
- 语音信号(特别是浊音)在频谱上具有明显的谐波结构 或共振峰结构。
- 背景噪声的频谱通常较平坦或具有不同的分布。
- 可以使用更复杂的特征如频谱熵 、梅尔频率倒谱系数的统计量(如第一维系数的均值和方差)等来表征这种差异,提高检测鲁棒性。
更先进的方法
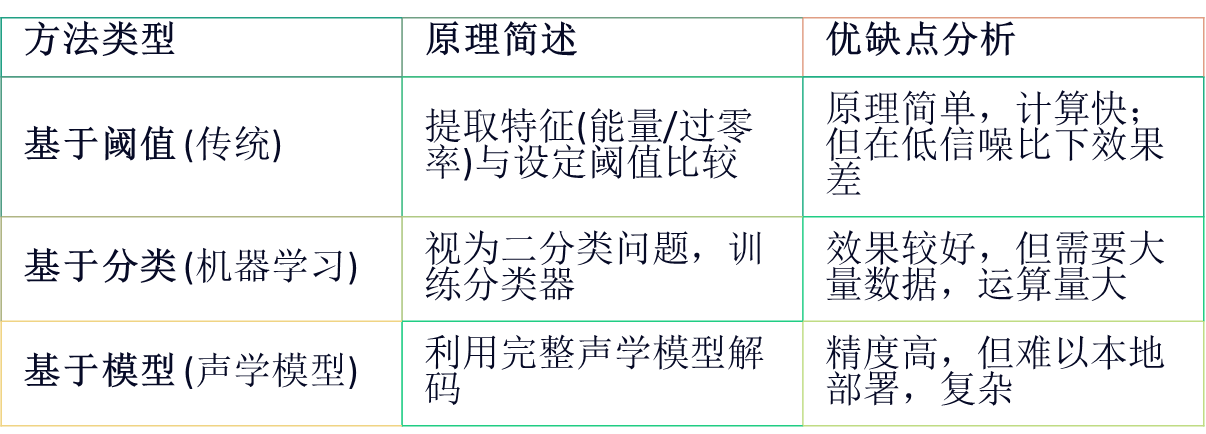
为了在复杂噪声环境下提高端点检测的鲁棒性,研究者提出了许多更先进的方法:
- 基于统计模型的方法 :如使用隐马尔可夫模型对语音和噪声状态进行建模。
- 基于机器学习的方法 :使用分类器(如支持向量机 , 深度神经网络)将每一帧信号分类为"语音"或"非语音"。
- 结合多特征融合:综合利用能量、过零率、频谱特征、倒谱特征等多种信息。
- 自适应阈值调整 :根据背景噪声水平动态调整检测阈值。
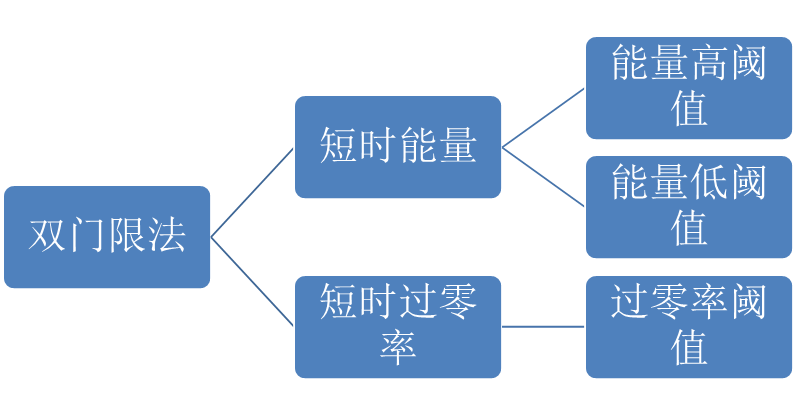
一、双门限法基本原理
双门限法是一种基于短时能量 和过零率 的语音端点检测方法。通过设置两个门限值(能量门限 T E T_E TE 和过零率门限 T Z T_Z TZ),结合噪声特性,实现语音段的起止点定位。其核心优势在于抗噪声干扰能力强,尤其适用于低信噪比环境。
二、完整步骤详解
步骤1:预处理
-
分帧
将语音信号 s ( n ) s(n) s(n) 分割为长度为 N N N 的帧,帧移 M M M(通常 M = N / 2 M = N/2 M=N/2)。
s i ( m ) = s ( i ⋅ M + m ) , 0 ≤ m < N s_i(m) = s(i \cdot M + m), \quad 0 \leq m < N si(m)=s(i⋅M+m),0≤m<N -
加窗
每帧加汉明窗以减少频谱泄漏:
w ( m ) = 0.54 − 0.46 cos ( 2 π m N − 1 ) w(m) = 0.54 - 0.46 \cos\left(\frac{2\pi m}{N-1}\right) w(m)=0.54−0.46cos(N−12πm)
步骤2:计算短时能量
每帧能量 E i E_i Ei 定义为:
E i = ∑ m = 0 N − 1 s i ( m ) ⋅ w ( m ) 2 E_i = \sum_{m=0}^{N-1} s_i(m) \\cdot w(m)^2 Ei=m=0∑N−1si(m)⋅w(m)2
步骤3:计算短时过零率
过零率 Z i Z_i Zi 表示信号穿过零轴的次数:
Z i = ∑ m = 1 N − 1 ∣ sgn s i ( m ) − sgn s i ( m − 1 ) ∣ Z_i = \sum_{m=1}^{N-1} \left| \operatorname{sgn}s_i(m) - \operatorname{sgn}s_i(m-1) \right| Zi=m=1∑N−1∣sgnsi(m)−sgnsi(m−1)∣
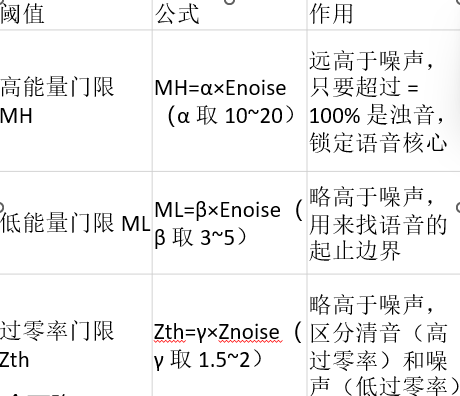
步骤4:噪声估计与门限设定
噪声难点:背景噪声会导致能量和过零率波动,需动态调整门限。
- 初始噪声估计
取前 K K K 帧(纯噪声段)计算平均能量 E ˉ noise \bar{E}\text{noise} Eˉnoise 和平均过零率 Z ˉ noise \bar{Z}\text{noise} Zˉnoise。 - 动态门限
- 能量门限:
- 过零率门限:
其中 α \alpha α、 β \beta β 为经验系数(通常 α ∈ 1.5 , 2.5 \alpha \in 1.5, 2.5 α∈1.5,2.5, β ∈ 1.2 , 1.8 \beta \in 1.2, 1.8 β∈1.2,1.8)。
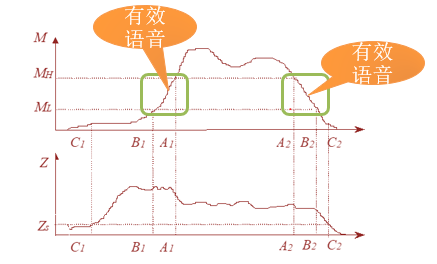
步骤5:双门限判决
- 初步检测
- 若 E i > T E E_i > T_E Ei>TE 且 Z i > T Z Z_i > T_Z Zi>TZ,标记为 语音段。
- 否则标记为 噪声段。
- 连续段合并
合并相邻的语音段,并忽略过短的孤立段(如长度 < 0.1 s < 0.1\text{s} <0.1s)。
步骤6:后处理优化
- 端点修正
语音起始点前扩展 T 1 T_1 T1 帧,结束点后扩展 T 2 T_2 T2 帧(捕获弱辅音)。 - 过零率补偿
对清音(如/s/)进行过零率加权: Z_i' = Z_i \\cdot \\gamma ( ( (\\gamma \> 1)。
三、噪声难点处理策略
- 非平稳噪声
- 动态更新 E ˉ noise \bar{E}\text{noise} Eˉnoise 和 Z ˉ noise \bar{Z}\text{noise} Zˉnoise(如每 10 10 10 帧更新一次)。
- 突发噪声
- 增加 过零率变化率检测 :若 Δ Z i = ∣ Z i − Z i − 1 ∣ > δ \Delta Z_i = |Z_i - Z_{i-1}| > \delta ΔZi=∣Zi−Zi−1∣>δ,暂不标记为语音。
- 低能量语音
- 使用 多通道门限 :
T E ′ = max ( T E , η ⋅ max ( E i ) ) ( η ≈ 0.1 ) T_E' = \max(T_E, \eta \cdot \max(E_i)) \quad (\eta \approx 0.1) TE′=max(TE,η⋅max(Ei))(η≈0.1)
- 使用 多通道门限 :
四、示意图说明
下图展示了双门限法在含噪语音中的检测过程:
---
### **五、示例代码(Python)**
```python
import numpy as np
def dual_threshold_detection(signal, fs, frame_len=0.025, frame_shift=0.01):
# 分帧与加窗
n_frame_len = int(frame_len * fs)
n_frame_shift = int(frame_shift * fs)
frames = [signal[i:i+n_frame_len] for i in range(0, len(signal)-n_frame_len, n_frame_shift)]
# 计算能量与过零率
energy = [np.sum(np.abs(frame)**2) for frame in frames]
zcr = [np.sum(np.abs(np.diff(np.sign(frame)))) / 2 for frame in frames]
# 噪声估计(前10%帧)
noise_frames = int(0.1 * len(frames))
E_noise = np.mean(energy[:noise_frames])
Z_noise = np.mean(zcr[:noise_frames])
# 设置门限
alpha, beta = 2.0, 1.5
T_E = alpha * E_noise
T_Z = beta * Z_noise
# 双门限判决
speech_flags = [(e > T_E and z > T_Z) for e, z in zip(energy, zcr)]
# 合并连续段并扩展端点
# ...(具体实现略)
return speech_segments六、总结
双门限法通过能量与过零率的协同判决 ,结合动态噪声估计 和后处理优化 ,显著提升了在噪声环境下的端点检测鲁棒性。实际应用中需根据场景调整 α \alpha α、 β \beta β 等参数,并针对非平稳噪声设计自适应更新策略。