一、环境说明
- 操作系统:Ubuntu 22.04 LTS(Jammy)
- ROS2 版本:Humble(长期支持版,支持至 2027)
- 安装方式:APT 官方源安装(推荐)
二、系统更新
1.设置语言环境
首先检查本地语言环境是否支持UTF-8编码,可调用如下指令检查并设置UTF-8编码:
locale # 检查是否支持 UTF-8
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
locale # 验证设置是否成果2.启动Ubuntu universe存储库
通过如下命令检查是否已经启动了Ubuntu universe存储库:
apt-cache policy | grep universe
500 http://us.archive.ubuntu.com/ubuntu jammy/universe amd64 Packages
release v=22.04,o=Ubuntu,a=jammy,n=jammy,l=Ubuntu,c=universe,b=amd64如果没有如上所示的输出,那么请调用如下命令启动Ubuntu universe存储库:
sudo apt install software-properties-common
sudo add-apt-repository universe3.安装基础工具:
sudo apt update && sudo apt install -y software-properties-common curl gnupg lsb-release三、添加 ROS2 软件源
1. 添加 GPG 密钥
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key \
-o /usr/share/keyrings/ros-archive-keyring.gpg2. 添加软件源
echo "deb [arch=$(dpkg --print-architecture) \
signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] \
http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | \
sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null3. 更新软件列表
sudo apt update四、安装 ROS2
ROS2 提供不同安装版本,根据需求选择:
1. 桌面完整版(推荐)
sudo apt install -y ros-humble-desktop包含:
- RViz2(3D 可视化)
- rqt 工具集
- demo 示例
- 常用功能包
2. 基础版(精简)
sudo apt install -y ros-humble-ros-base包含:
- 通信库、
- 消息包、
- 命令行工具,
- 但是没有 GUI 工具
适用于:
- 服务器
- 嵌入式设备
- 无 GUI 环境
五、配置环境变量
安装完成后,需要加载 ROS2 环境:
source /opt/ros/humble/setup.bash为了每次打开终端自动生效:
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc
source ~/.bashrc六、安装开发工具(推荐)
sudo apt install -y python3-colcon-common-extensions python3-rosdep python3-vcstool初始化 rosdep(依赖管理工具):
sudo rosdep init
rosdep update七、验证安装是否成功
打开两个终端:
1.打开两个终端(可以使用快捷键Ctrl + Alt + T);
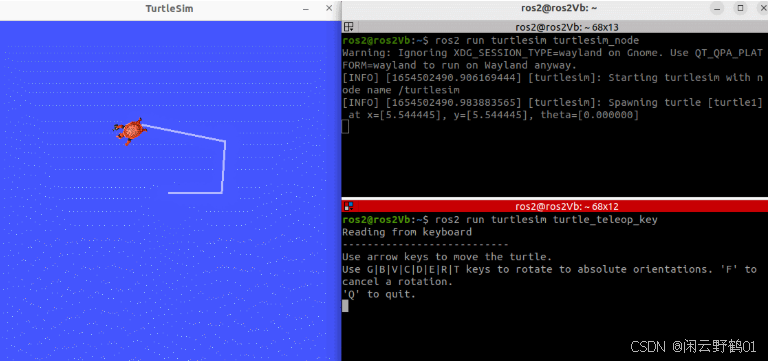
2.终端1中输入指令:
ros2 run turtlesim turtlesim_node执行完毕,会启动一个绘有小乌龟的窗口;
3.终端2中输入指令
ros2 run turtlesim turtle_teleop_key执行完毕,可以在此终端中通过键盘控制乌龟运动。
八、常见问题及解决
1. 找不到 ros2 命令
原因:未加载环境变量
解决:
sudo rosdep init
rosdep update2. rosdep 初始化失败
尝试:
sudo rosdep init
rosdep update或检查网络连接。
3. 软件源访问慢
可以考虑使用国内镜像源(如清华、中科大)提升下载速度。
4. 关于卸载(谨慎操作)
ROS2安装完毕之后,如果想卸载ROS2,可以执行如下命令:
sudo apt remove ~nros-humble-* && sudo apt autoremove还可以再删除ROS2对应的存储库:
sudo rm /etc/apt/sources.list.d/ros2.list
sudo apt update
sudo apt autoremove
# Consider upgrading for packages previously shadowed.
sudo apt upgrade