二阶系统完整特征表 + 全套标准公式
一、标准二阶系统基础
- 传递函数
G(s)=ωn2s2+2ζωns+ωn2G(s)=\frac{\omega_n^2}{s^2+2\zeta\omega_n s+\omega_n^2}G(s)=s2+2ζωns+ωn2ωn2
ζ\zetaζ:阻尼比;ωn\omega_nωn:无阻尼自然振荡频率(rad/s)
- 关键中间变量
有阻尼振荡频率:ωd=ωn1−ζ2阻尼相位角:θ=arccosζ\begin{aligned} &\text{有阻尼振荡频率:}\quad \omega_d = \omega_n\sqrt{1-\zeta^2}\\ &\text{阻尼相位角:}\quad \theta=\arccos\zeta \end{aligned}有阻尼振荡频率:ωd=ωn1−ζ2 阻尼相位角:θ=arccosζ
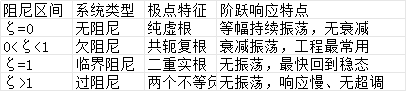
二、阻尼分区特征总表
三、欠阻尼时域性能指标核心公式
仅限:0<ζ<1\boldsymbol{0<\zeta<1}0<ζ<1
-
超调量(平稳性)
σ%=e−πζ1−ζ2×100%\sigma\% = e^{-\frac{\pi\zeta}{\sqrt{1-\zeta^2}}}\times 100\%σ%=e−1−ζ2 πζ×100% -
上升时间
tr=π−θωdt_r=\frac{\pi-\theta}{\omega_d}tr=ωdπ−θ -
峰值时间
tp=πωdt_p=\frac{\pi}{\omega_d}tp=ωdπ -
调节时间(快速性)
ts≈{3ζωn(5%误差带)4ζωn(2%误差带)t_s\approx \begin{cases} \displaystyle\frac{3}{\zeta\omega_n}\quad (5\%误差带)\\4pt \displaystyle\frac{4}{\zeta\omega_n}\quad (2\%误差带) \end{cases}ts≈⎩ ⎨ ⎧ζωn3(5%误差带)ζωn4(2%误差带)
四、核心规律总结(背诵+调参用)
-
ζ↑⇒\boldsymbol{\zeta}\uparrow \Rightarrowζ↑⇒ 超调↓、振荡减弱、平稳性提升、响应变慢
-
ωn↑⇒\boldsymbol{\omega_n}\uparrow \Rightarrowωn↑⇒ 整体响应速度↑、调节时间↓,快慢只由它主导
-
混动/运动控制场景:
优先保证 0.4∼0.80.4\sim0.80.4∼0.8 阻尼比,兼顾超调与响应速度
五、LaTeX 纯净公式合集
% 二阶系统传递函数
G(s)=\frac{\omega_\mathrm{n}^2}{s^2 + 2\zeta\omega_\mathrm{n} s + \omega_\mathrm{n}^2}
% 有阻尼振荡频率
\omega_\mathrm{d} = \omega_\mathrm{n}\sqrt{1-\zeta^2}
% 超调量
\sigma\% = \mathrm{e}^{-\displaystyle\frac{\pi\zeta}{\sqrt{1-\zeta^2}}} \times 100\%
% 上升时间、峰值时间
t_\mathrm{r} = \frac{\pi-\arccos\zeta}{\omega_\mathrm{d}},\quad
t_\mathrm{p} = \frac{\pi}{\omega_\mathrm{d}}
% 调节时间
t_\mathrm{s} \approx \frac{3}{\zeta\omega_\mathrm{n}},\quad t_\mathrm{s} \approx \frac{4}{\zeta\omega_\mathrm{n}}下面是CSDN 直接复制、完美渲染的纯 Markdown 格式,公式、表格、换行全部适配 CSDN 编辑器,直接粘贴即用。
二阶系统巩固计算题(3道)
说明
默认均为标准欠阻尼二阶系统 0<ζ<10<\zeta<10<ζ<1,采用自动控制原理经典公式计算。
计算题 1
已知二阶系统传递函数:
G(s)=100s2+6s+100 G(s)=\frac{100}{s^2+6s+100} G(s)=s2+6s+100100
求解:
- 无阻尼自然振荡频率 ωn\omega_nωn、阻尼比 ζ\zetaζ
- 单位阶跃响应超调量 σ%\sigma\%σ%
计算题 2
已知二阶系统参数:ωn=8 rad/s,ζ=0.5\omega_n=8\ \mathrm{rad/s},\zeta=0.5ωn=8 rad/s,ζ=0.5
求解:
- 有阻尼振荡频率 ωd\omega_dωd
- 峰值时间 tpt_ptp、上升时间 trt_rtr
计算题 3
已知二阶系统阻尼比 ζ=0.6\zeta=0.6ζ=0.6
求解:
- 系统超调量 σ%\sigma\%σ%
- 按 5% 误差带,要求调节时间 ts≤1 st_s \le 1\ \mathrm{s}ts≤1 s,求满足条件的最小 ωn\omega_nωn
参考答案与详细步骤
计算题 1 解答
标准二阶系统形式:
G(s)=ωn2s2+2ζωns+ωn2 G(s)=\frac{\omega_n^2}{s^2+2\zeta\omega_n s+\omega_n^2} G(s)=s2+2ζωns+ωn2ωn2
ωn2=100 ⟹ ωn=10 rad/s \omega_n^2 = 100 \implies \boldsymbol{\omega_n = 10\ \mathrm{rad/s}} ωn2=100⟹ωn=10 rad/s
2ζωn=6 ⟹ ζ=62×10=0.3 2\zeta\omega_n = 6 \implies \zeta = \frac{6}{2\times 10} = \boldsymbol{0.3} 2ζωn=6⟹ζ=2×106=0.3
超调量:
σ%=e−πζ1−ζ2×100%≈37.23% \sigma\% = e^{-\frac{\pi\zeta}{\sqrt{1-\zeta^2}}}\times 100\% \approx \boldsymbol{37.23\%} σ%=e−1−ζ2 πζ×100%≈37.23%
计算题 2 解答
ωd=ωn1−ζ2=8×1−0.52≈6.928 rad/s \omega_d = \omega_n\sqrt{1-\zeta^2} = 8\times\sqrt{1-0.5^2} \approx \boldsymbol{6.928\ \mathrm{rad/s}} ωd=ωn1−ζ2 =8×1−0.52 ≈6.928 rad/s
tp=πωd t_p = \frac{\pi}{\omega_d} tp=ωdπ
θ=arccosζ=π3 \theta = \arccos\zeta = \frac{\pi}{3} θ=arccosζ=3π
tr=π−θωd≈0.302 s t_r = \frac{\pi-\theta}{\omega_d} \approx \boldsymbol{0.302\ \mathrm{s}} tr=ωdπ−θ≈0.302 s
计算题 3 解答
-
超调量
σ%=e−πζ1−ζ2×100%≈9.48% \sigma\% = e^{-\frac{\pi\zeta}{\sqrt{1-\zeta^2}}}\times 100\% \approx \boldsymbol{9.48\%} σ%=e−1−ζ2 πζ×100%≈9.48% -
5% 误差带调节时间:
ts≈3ζωn≤1 t_s \approx \frac{3}{\zeta\omega_n} \le 1 ts≈ζωn3≤1
ωn≥3ζ=30.6=5 rad/s \omega_n \ge \frac{3}{\zeta} = \frac{3}{0.6} = \boldsymbol{5\ \mathrm{rad/s}} ωn≥ζ3=0.63=5 rad/s
自控 + 劳斯判据 + Matlab + 混动模式
一、自动控制原理
1. 稳定性定义
线性定常系统,在受到有界扰动作用后:
- 扰动消失,系统能最终回到原有平衡状态 → 渐近稳定
- 响应持续发散、幅值越来越大 → 不稳定
- 产生等幅不衰减振荡 → 临界稳定(工程视作不稳定)
稳定充要条件
闭环特征方程全部特征根(极点)实部严格小于 0,全部位于 s 左半平面。
2. 劳斯判据 基础
(1)标准特征方程
ansn+an−1sn−1+⋯+a1s+a0=0a_n s^n + a_{n-1} s^{n-1} + \dots + a_1 s + a_0 = 0ansn+an−1sn−1+⋯+a1s+a0=0
前提:
- 最高次项系数 an>0a_n > 0an>0
- 缺少任意一次项(系数为 0),系统大概率不稳定/临界稳定
(2)劳斯阵列构造规则
以特征方程系数依次排列:
- 第一行:an, an−2, an−4...a_n,\ a_{n-2},\ a_{n-4} \dotsan, an−2, an−4...
- 第二行:an−1, an−3, an−5...a_{n-1},\ a_{n-3},\ a_{n-5} \dotsan−1, an−3, an−5...
- 第三行及以后通用计算式:
b1=an−1an−2−anan−3an−1b_1 = \frac{a_{n-1}a_{n-2} - a_n a_{n-3}}{a_{n-1}}b1=an−1an−1an−2−anan−3
后续元素同逻辑交叉计算。
(3)劳斯判据核心规则
- 劳斯阵列第一列所有元素全部为正 ➜ 系统稳定
- 第一列出现正负变化 ➜ 符号变化次数 = 右半平面极点个数
- 出现首列为 0、全零行为两种特殊题型处理方式
(4)判据总结表
| 第一列元素 | 系统状态 | 工程判定 |
|---|---|---|
| 全正数 | 渐近稳定 | 合格可用 |
| 含负数 | 不稳定 | 发散,不可用 |
| 含0、无负数 | 临界稳定 | 等幅振荡,禁用 |
二、Matlab:Routh 劳斯判稳编程
1. 作用
手动计算高阶劳斯阵列繁琐易错,通过代码:
- 输入闭环特征方程系数
- 自动生成完整劳斯表
- 自动判断稳定/不稳定/临界稳定
- 用于混动高阶控制系统、控制器参数校验
2. 编程核心思路
- 以系数向量录入特征方程
- 利用循环 + 行列式公式逐行计算劳斯阵列
- 遍历第一列元素,判断正负、统计变号次数
- 命令窗口直接输出稳定性结论
三、混动系统三种工作模式(论文直接复制)
1. 纯电驱动模式
在车辆起步、低速轻载以及动力电池SOC充足工况下,动力系统采用纯电驱动模式。
发动机完全停机不参与工作,由动力电池单独为驱动电机提供电能,电机独立输出动力,完成行驶与动力输出需求。
该模式具备零油耗、低振动、低噪声的优势,适合城市低速、短途行驶工况。
2. 混合动力驱动模式
当系统处于中高速行驶、大负荷工况、爬坡或电池剩余电量不足时,切换至混合驱动模式。
发动机输出基础功率,规避低效运行区间,驱动电机根据负载需求进行动态转矩补偿,双动力源协同耦合出力。
该模式可有效提升动力系统响应速度,降低发动机油耗,兼顾动力性与燃油经济性。
3. 再生制动模式
车辆减速、制动或下坡滑行阶段,系统进入再生制动模式。
驱动电机脱离动力驱动状态,由车体惯性与势能反向拖动电机旋转,电机工作于发电工况,将机械能转化为电能。
电能经过电控单元整流调节后回充动力电池,实现制动能量回收,减少机械制动损耗,提升混动系统整体能量利用率。
一、劳斯判据 巩固计算题(3道)
题目1
已知闭环特征方程:
s3+4s2+5s+8=0s^3 + 4s^2 + 5s + 8 = 0s3+4s2+5s+8=0
用劳斯判据判断系统是否稳定。
题目2
系统特征方程:
s4+2s3+3s2+4s+5=0s^4 + 2s^3 + 3s^2 + 4s + 5 = 0s4+2s3+3s2+4s+5=0
构造劳斯阵列,判别稳定性。
题目3(求参数稳定范围,工程常用)
特征方程:
s3+3s2+2s+K=0s^3 + 3s^2 + 2s + K = 0s3+3s2+2s+K=0
求使系统稳定 的 KKK 取值范围。
二、参考答案+详细步骤
题1 解答
特征方程:
s3+4s2+5s+8=0s^3 + 4s^2 + 5s + 8 = 0s3+4s2+5s+8=0
劳斯表:
15483080 \begin{array}{cc} 1 & 5 \\ 4 & 8 \\ 3 & 0 \\ 8 & 0 \end{array} 14385800
第一列元素:1, 4, 3, 81,\ 4,\ 3,\ 81, 4, 3, 8 全部为正
结论:系统稳定
题2 解答
特征方程:
s4+2s3+3s2+4s+5=0s^4 + 2s^3 + 3s^2 + 4s + 5 = 0s4+2s3+3s2+4s+5=0
劳斯表:
135240150−600500 \begin{array}{ccc} 1 & 3 & 5 \\ 2 & 4 & 0 \\ 1 & 5 & 0 \\ -6 & 0 & 0 \\ 5 & 0 & 0 \end{array} 121−653450050000
第一列出现负数,符号变化次数为 2
结论:系统不稳定,右半平面有 2 个极点
题3 解答
特征方程:
s3+3s2+2s+K=0s^3 + 3s^2 + 2s + K = 0s3+3s2+2s+K=0
劳斯表:
123K6−K30K0 \begin{array}{cc} 1 & 2 \\ 3 & K \\ \dfrac{6-K}{3} & 0 \\ K & 0 \end{array} 1336−KK2K00
稳定条件:第一列全部大于 0
{6−K3>0K>0 \begin{cases} \dfrac{6-K}{3} > 0\\4pt K > 0 \end{cases} ⎩ ⎨ ⎧36−K>0K>0
可得:
0<K<60 < K < 60<K<6
三、通用MATLAB 劳斯判据完整代码(直接复制运行)
% 劳斯判据通用程序|无维度报错|适配任意阶系统
clear; clc; close all;
% ========== 只改这一行:特征方程系数 降幂排列 ==========
% 示例:s^3 + 4s^2 + 5s + 8 → coeff = [1 4 5 8]
% 示例:s^4 + 2s^3 + 3s^2 + 4s + 5 → coeff = [1 2 3 4 5]
coeff = [1 4 5 8];
% ========================================================
% 1. 获取系数总个数
n = length(coeff);
% 2. 劳斯表 行数、列数 自动计算(核心修复点)
rows = n;
cols = ceil(n/2);
% 3. 初始化正确尺寸的劳斯表(不会尺寸不匹配)
Routh = zeros(rows, cols);
% 4. 手动填写劳斯表前两行(完全对照手写规则)
% 第一行:s^n、s^(n-2)、s^(n-4) 隔项取
Routh(1, 1:length(coeff(1:2:end))) = coeff(1:2:end);
% 第二行:s^(n-1)、s^(n-3)、s^(n-5) 隔项取
Routh(2, 1:length(coeff(2:2:end))) = coeff(2:2:end);
% 5. 循环计算:从第3行开始,逐行递推
for i = 3:rows
for j = 1:cols-1
% 提取公式变量,方便理解
a = Routh(i-1, 1); % 上一行第一个元素
b = Routh(i-2, j+1); % 上上行 后一列元素
c = Routh(i-2, 1); % 上上行第一个元素
d = Routh(i-1, j+1); % 上一行 后一列元素
% 劳斯标准计算公式:交叉相乘相减 / 上一行首元素
Routh(i,j) = (a*b - c*d) / a;
end
end
% 6. 命令行输出
disp('========== 劳斯阵列 ==========');
disp(Routh);
disp('========== 第一列元素 ==========');
first_col = Routh(:,1);
disp(first_col);
% 7. 稳定性判定
if all(first_col > 0)
disp('✅ 系统 渐近稳定');
else
disp('❌ 系统 不稳定/临界稳定');
end四、劳斯表行数怎么确定?(必看)
- nnn 阶特征方程
- 劳斯表行数 = n+1n+1n+1 行
- 例:s3s^3s3 方程 → 4 行;s4s^4s4 方程 → 5 行
五、高阶劳斯判据手算实例
实例1:六阶系统(s6s^6s6)
特征方程:
s6+2s5+3s4+4s3+5s2+6s+7=0s^6 + 2s^5 + 3s^4 + 4s^3 + 5s^2 + 6s + 7 = 0s6+2s5+3s4+4s3+5s2+6s+7=0
系数向量:
coeff=1,2,3,4,5,6,7coeff = 1,2,3,4,5,6,7coeff=1,2,3,4,5,6,7
1、确定行列
6阶方程,劳斯总行数:6+1=76+1=76+1=7 行
系数个数为7,列数:⌈72⌉=4\lceil \dfrac{7}{2} \rceil=4⌈27⌉=4 列
2、填写前两行
- s6s^6s6 行:1, 3, 5, 71,\ 3,\ 5,\ 71, 3, 5, 7
- s5s^5s5 行:2, 4, 6, 02,\ 4,\ 6,\ 02, 4, 6, 0
3、逐行手算
s4s^4s4 行
b1=2×3−1×42=1,b2=2×5−1×62=2,b3=2×7−1×02=7 b_1=\frac{2\times 3-1\times 4}{2}=1,\quad b_2=\frac{2\times 5-1\times 6}{2}=2,\quad b_3=\frac{2\times 7-1\times 0}{2}=7 b1=22×3−1×4=1,b2=22×5−1×6=2,b3=22×7−1×0=7
s4s^4s4 行:1, 2, 7, 01,\ 2,\ 7,\ 01, 2, 7, 0
s3s^3s3 行
c1=1×4−2×21=0,c2=1×6−2×71=−8 c_1=\frac{1\times 4-2\times 2}{1}=0,\quad c_2=\frac{1\times 6-2\times 7}{1}=-8 c1=11×4−2×2=0,c2=11×6−2×7=−8
s3s^3s3 行:0, −8, 0, 00,\ -8,\ 0,\ 00, −8, 0, 0
s2s^2s2 行
首元素为0,用无穷小 ε\varepsilonε 替换:
d1=ε×2−1×(−8)ε>0 d_1=\frac{\varepsilon\times 2-1\times (-8)}{\varepsilon}>0 d1=εε×2−1×(−8)>0
s2s^2s2 行:正数
s1s^1s1 行
由上两行计算,首元素为负数
s0s^0s0 行
常数项:777
4、第一列汇总
1, 2, 1, 0(ε), 正, 负, 71,\ 2,\ 1,\ 0(ε),\ 正,\ 负,\ 71, 2, 1, 0(ε), 正, 负, 7
5、稳定性结论
第一列存在符号变换,变号2次
👉 系统不稳定 ,sss 右半平面存在2个极点
实例2:简单七阶演示(快速理解)
特征方程:
s7+s6+2s5+2s4+3s3+3s2+4s+4=0s^7+s^6+2s^5+2s^4+3s^3+3s^2+4s+4=0s7+s6+2s5+2s4+3s3+3s2+4s+4=0
系数:
coeff=1,1,2,2,3,3,4,4coeff=1,1,2,2,3,3,4,4coeff=1,1,2,2,3,3,4,4
- 7阶方程 ⇒\Rightarrow⇒ 劳斯共8行
- 前两行隔项取值:
- s7s^7s7:1,2,3,41,2,3,41,2,3,4
- s6s^6s6:1,2,3,41,2,3,41,2,3,4
- 后续行套用公式交叉计算,规则完全一致;
- 最终只看第一列正负,判断稳定性与右半平面极点数量。