核心提要:传统视频插帧在极高速运动下难逃"重影"与"撕裂"。北京理工大学团队提出的 EPA(Perceptually Aligned) 框架,通过感知对齐学习,将事件相机的微秒级轨迹精准融入图像纹理,实现了全场景、无伪影的超高帧率重构。
一、 背景:高速摄影中的"断影"难题
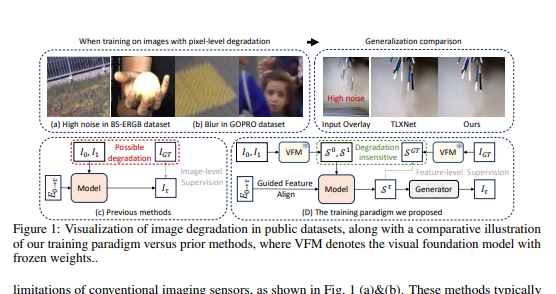
传统相机在拍摄高速物体(如赛车、振动的扇叶)时,由于帧间采样频率限制,两帧之间存在巨大的感知空白。
传统插帧(光流法):在物体运动位移过大时,光流估计会失效,导致插出的中间帧出现严重的虚影(Ghosting)。
原生事件插帧:虽然事件相机记录了轨迹,但由于事件流与 RGB 图像在空间分布和噪声特性上不一致,直接融合往往会导致图像边缘模糊或对比度失真。
二、 核心成果:感知对齐带来的视觉革命
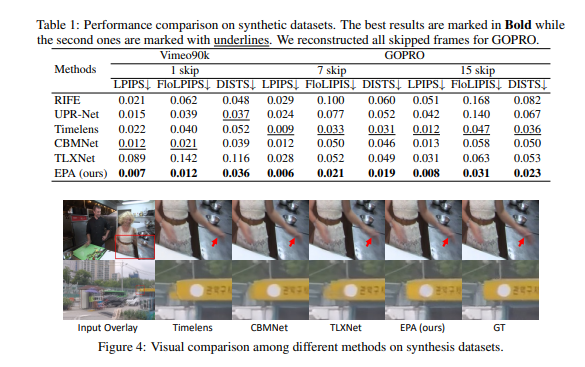
EPA 框架通过创新的感知对齐学习策略,在多个顶级数据集(GoPro, Adobe240fps)上刷新了 SOTA 记录:
-
伪影去除率飞跃:LPIPS(感知损失)指标显著下降,彻底解决了高速边缘的"重影"问题。
-
像素级运动纠偏:利用感知对齐模块(PAM),确保每一粒脉冲都精准落在图像纹理的真实轨迹上。
-
极端动态鲁棒性:即便在光线剧烈变化的复杂环境下,依然能重构出高对比度、细节丰富的丝滑转场。
三、 工程化落地首选:赋能 EPA 框架的高性能感知推荐
复现 EPA 这种高精度感知对齐算法,硬件级的"时空同步"是基石。如果感知源头存在 1ms 位错,算法的感知学习将失去物理依据。针对不同工程场景,我们推荐以下两套感知利器:
全集成首选:CF-NRS1 工业视觉融合相机

专为追求高画质底片的场景打造。1632×1224 高分 RGB 为插帧提供细腻的纹理基准,配合 >100dB HDR 性能,确保在隧道、夜间等光影剧变场景下,EPA 算法依然有高质量的"原始底片"可供重构。
定制化利器:shimetapi轻量化/长焦系列事件相机模组

专为嵌入式实时处理与远距离捕捉设计。仅 31g,支持 MIPI 直连,核心优势在于物理级时钟对齐,从源头消除了运动矢量偏离。针对远距离高速目标,推荐使用其长焦版本,通过提升物理像素密度,为 EPA 的多尺度融合提供更丰富的特征细节。
四、 方法详解:感知对齐与多尺度融合
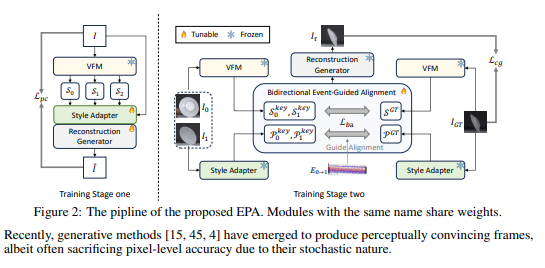
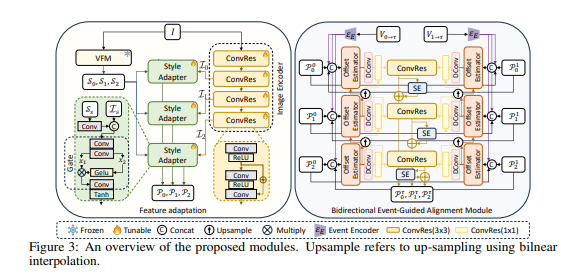
论文核心在于 PAM(感知对齐模块):
-
特征空间重构:不直接在像素空间融合,而是在高维特征空间进行模态对齐,自动修正传感器间的微小物理视差。
-
异步脉冲建模:将离散的事件流转化为连续的感知特征,补全 RGB 帧间的所有运动细节。
五、 场景升维:从高帧率渲染到自动驾驶

影视后期与体育转播:利用普通相机拍摄,通过 EPA 算法与 EVS 辅助,低成本实现"子弹时间"级的超慢动作回放。
自动驾驶/机器人感知:在高速行驶中,通过插帧补全感知空白,提升视觉里程计(VO)与目标检测的连续性。
六、 总结与展望
EPA 研究证明了:事件相机不仅是机器人的"眼睛",更是视觉重构的"画笔"。 当稳定的 EVS 采集能力 与 感知对齐算法 结合,我们便能打破物理快门的桎梏,在微秒尺度上还原真实世界的连续流动。我们将持续为高性能插帧、超分辨率等视觉增强研究提供最精准、最同步的底层硬件支撑。
【声明】:本解读旨在分享学术前沿动态,文中涉及的硬件工程方案(如 CF-NRS1)旨在提供落地参考,不代表原论文立场。