一、论文情况
-
论文
1 HAN Z, WU Y, LI T, 等. An efficient spatial-temporal trajectory planner for autonomous vehicles in unstructured environmentsJ/OL. IEEE Transactions On Intelligent Transportation Systems, 2024, 25(2): 1797-1814. DOI:10.1109/TITS.2023.3315320.
-
源码链接
https://github.com/ZJU-FAST-Lab/Dftpav?tab=readme-ov-file
二、复现
0. 笔者环境
Ubuntu; GPU: RTX 5060;
(关于电脑性能,本实验要求并不高;但在编译过程以及运行 roslaunch 指令时,可能需要稍微调整。 )
使用 docker 容器复现实验。
1. 创建 docker 容器
使用 ROS Melodic 的镜像;(docker pull osrf/ros:melodic-desktop-full)
step1. 下载 github 项目的 zip 文件,将 zip 文件解压缩后,存储到挂载目录下
step2. 创建 docker 容器
bash
# -v <宿主机目录>:<容器内目录> 将宿主机上的目录挂载到容器内部的目录
docker run -it \
--name=Dftpav \
--gpus=all \
-e NVIDIA_DRIVER_CAPABILITIES=all \
--network=host \
--privileged=true \
-e DISPLAY=$DISPLAY \
-e WAYLAND_DISPLAY=$WAYLAND_DISPLAY \
-e XDG_RUNTIME_DIR=$XDG_RUNTIME_DIR \
-e PULSE_SERVER=$PULSE_SERVER \
-v /tmp/.X11-unix:/tmp/.X11-unix \
-v /home/xiaobai/projects/Dftpav:/catkin_ws/src/Dftpav \
osrf/ros:melodic-desktop-full \
/bin/bash2. 安装依赖
step1. apt 安装基础依赖
bash
sudo apt update && apt install -y libgoogle-glog-dev libdw-dev libopenblas-dev gfortran wget unzipstep2. 安装 protobuf
使用 protoc --version 指令,可以发现 osrf/ros:melodic-desktop-full 已经安装好了 libprotoc 3.0.0,因此无需再次安装。
step3. 安装其他依赖
bash
# 安装缺失的 ompl 和 msgs
apt install -y libompl* ros-melodic-geographic-msgs ros-melodic-tf2-sensor-msgs注意:这里一定一定 要安装和 ros 无关的 ompl 库(libompl*,星号不可以省略)!
3. 编译
bash
source /opt/ros/melodic/setup.bash
cd /catkin_ws
catkin_make -DCMAKE_BUILD_TYPE=Release此处,编译若是遇到下列问题,请参考本文的第三部分去寻找解决方法。
① 找不到 ompl
② 内存不足(c++: internal compiler error: Killed(program cppplus), Invoking "make -j16 -l16" failed)
4. 运行
bash
cd /catkin_ws
source devel/setup.bash
cd /catkin_ws/src/Dftpav/
./run.sh在 Rviz 界面点击 2D Nav Goal 发布点,可以激活规划程序。
这里,若是遇到 "No map is update" 的问题,参考本文的第三部分解决。
ps:最后,笔者为了以后开发方便,将环境打包成镜像:
bash
docker commit Dftpav dftpav:v0
docker save -o dftpav.tar dftpav:v0最终的镜像 tar 文件保存在 /home/xiaobai/projects 目录。
三、遇到的问题记录
1. ompl 相关问题
在进行 catkin 编译时,遇到问题:
root@docker-desktop:/catkin_ws# catkin_make -DCMAKE_BUILD_TYPE=Release
Base path: /catkin_ws
Source space: /catkin_ws/src
Build space: /catkin_ws/build
Devel space: /catkin_ws/devel
Install space: /catkin_ws/install
Creating symlink "/catkin_ws/src/CMakeLists.txt" pointing to "/opt/ros/melodic/share/catkin/cmake/toplevel.cmake"
Running command: "cmake /catkin_ws/src -DCMAKE_BUILD_TYPE=Release -DCATKIN_DEVEL_PREFIX=/catkin_ws/devel -DCMAKE_INSTALL_PREFIX=/catkin_ws/install -G Unix Makefiles" in "/catkin_ws/build"
-- The C compiler identification is GNU 7.5.0
-- The CXX compiler identification is GNU 7.5.0
-- Check for working C compiler: /usr/bin/cc
-- Check for working C compiler: /usr/bin/cc -- works
-- Detecting C compiler ABI info
-- Detecting C compiler ABI info - done
-- Detecting C compile features
-- Detecting C compile features - done
-- Check for working CXX compiler: /usr/bin/c++
-- Check for working CXX compiler: /usr/bin/c++ -- works
-- Detecting CXX compiler ABI info
-- Detecting CXX compiler ABI info - done
-- Detecting CXX compile features
-- Detecting CXX compile features - done
-- Using CATKIN_DEVEL_PREFIX: /catkin_ws/devel
-- Using CMAKE_PREFIX_PATH: /opt/ros/melodic
-- This workspace overlays: /opt/ros/melodic
-- Found PythonInterp: /usr/bin/python2 (found suitable version "2.7.17", minimum required is "2")
-- Using PYTHON_EXECUTABLE: /usr/bin/python2
-- Using Debian Python package layout
-- Using empy: /usr/bin/empy
-- Using CATKIN_ENABLE_TESTING: ON
-- Call enable_testing()
-- Using CATKIN_TEST_RESULTS_DIR: /catkin_ws/build/test_results
-- Found gtest sources under '/usr/src/googletest': gtests will be built
-- Found gmock sources under '/usr/src/googletest': gmock will be built
-- Found PythonInterp: /usr/bin/python2 (found version "2.7.17")
-- Looking for pthread.h
-- Looking for pthread.h - found
-- Looking for pthread_create
-- Looking for pthread_create - not found
-- Looking for pthread_create in pthreads
-- Looking for pthread_create in pthreads - not found
-- Looking for pthread_create in pthread
-- Looking for pthread_create in pthread - found
-- Found Threads: TRUE
-- Using Python nosetests: /usr/bin/nosetests-2.7
-- catkin 0.7.29
-- BUILD_SHARED_LIBS is on
-- BUILD_SHARED_LIBS is on
-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
-- ~~ traversing 19 packages in topological order:
-- ~~ - catkin_simple
-- ~~ - decomp_ros_msgs
-- ~~ - playgrounds
-- ~~ - common
-- ~~ - decomp_ros_utils
-- ~~ - vehicle_model
-- ~~ - forward_simulator
-- ~~ - motion_predictor
-- ~~ - vehicle_msgs
-- ~~ - aux_tools
-- ~~ - phy_simulator
-- ~~ - semantic_map_manager
-- ~~ - route_planner
-- ~~ - behavior_planner
-- ~~ - ai_agent_planner
-- ~~ - eudm_planner
-- ~~ - ssc_planner
-- ~~ - traj_planner
-- ~~ - planning_integrated
-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
-- +++ processing catkin package: 'catkin_simple'
-- ==> add_subdirectory(Dftpav/src/Plan/utils/catkin_simple)
-- +++ processing catkin package: 'decomp_ros_msgs'
-- ==> add_subdirectory(Dftpav/src/Plan/utils/DecompROS/decomp_ros_msgs)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- decomp_ros_msgs: 4 messages, 0 services
-- +++ processing catkin package: 'playgrounds'
-- ==> add_subdirectory(Dftpav/src/Sim/core/playgrounds)
-- +++ processing catkin package: 'common'
-- ==> add_subdirectory(Dftpav/src/Sim/core/common)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- Found Protobuf: /usr/local/lib/libprotobuf.so;-lpthread (found version "3.21.12")
-- Found Glog: /usr/include
-- Found glog (include: /usr/include, library: /usr/lib/x86_64-linux-gnu/libglog.so)
-- Found OpenCV: /usr (found version "3.2.0")
-- Found OOQP include dirs: /catkin_ws/src/Dftpav/src/Sim/core/common/thirdparty/ooqp/include/ooqp
-- Found OOQP libraries: /catkin_ws/src/Dftpav/src/Sim/core/common/thirdparty/ooqp/lib/libooqpgensparse.a;/catkin_ws/src/Dftpav/src/Sim/core/common/thirdparty/ooqp/lib/libooqpsparse.a;/catkin_ws/src/Dftpav/src/Sim/core/common/thirdparty/ooqp/lib/libooqpgondzio.a;/catkin_ws/src/Dftpav/src/Sim/core/common/thirdparty/ooqp/lib/libooqpbase.a;/catkin_ws/src/Dftpav/src/Sim/core/common/thirdparty/ooqp/lib/libma27.a;blas;gfortran
-- Found OOQP
-- Found NLOPT include dirs: /catkin_ws/src/Dftpav/src/Sim/core/common/thirdparty/nlopt/include
-- Found NLOPT libraries: /catkin_ws/src/Dftpav/src/Sim/core/common/thirdparty/nlopt/lib/libnlopt.so
-- Found NLOPT
-- +++ processing catkin package: 'decomp_ros_utils'
-- ==> add_subdirectory(Dftpav/src/Plan/utils/DecompROS/decomp_ros_utils)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- Using Qt5 based on the rviz_QT_VERSION: 5.9.5
-- Marking SHARED_LIBRARY "decomp_rviz_plugins" of package "decomp_ros_utils" for installation
-- Marking HEADER FILES in "include" folder of package "decomp_ros_utils" for installation
-- +++ processing catkin package: 'vehicle_model'
-- ==> add_subdirectory(Dftpav/src/Sim/core/vehicle_model)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- +++ processing catkin package: 'forward_simulator'
-- ==> add_subdirectory(Dftpav/src/Sim/core/forward_simulator)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- +++ processing catkin package: 'motion_predictor'
-- ==> add_subdirectory(Dftpav/src/Sim/core/motion_predictor)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- +++ processing catkin package: 'vehicle_msgs'
-- ==> add_subdirectory(Dftpav/src/Sim/core/vehicle_msgs)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- vehicle_msgs: 17 messages, 0 services
-- +++ processing catkin package: 'aux_tools'
-- ==> add_subdirectory(Dftpav/src/Sim/aux_tools)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- +++ processing catkin package: 'phy_simulator'
-- ==> add_subdirectory(Dftpav/src/Sim/core/phy_simulator)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- +++ processing catkin package: 'semantic_map_manager'
-- ==> add_subdirectory(Dftpav/src/Sim/core/semantic_map_manager)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- +++ processing catkin package: 'route_planner'
-- ==> add_subdirectory(Dftpav/src/Sim/core/route_planner)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- +++ processing catkin package: 'behavior_planner'
-- ==> add_subdirectory(Dftpav/src/Sim/core/behavior_planner)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- +++ processing catkin package: 'ai_agent_planner'
-- ==> add_subdirectory(Dftpav/src/Sim/util/ai_agent_planner)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- +++ processing catkin package: 'eudm_planner'
-- ==> add_subdirectory(Dftpav/src/Sim/util/eudm_planner)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
CMake Warning at /opt/ros/melodic/share/catkin/cmake/catkin_package.cmake:418 (message):
catkin_package() include dir
'/catkin_ws/build/Dftpav/src/Sim/util/eudm_planner' should be placed in the
devel space instead of the build space
Call Stack (most recent call first):
/opt/ros/melodic/share/catkin/cmake/catkin_package.cmake:102 (_catkin_package)
Dftpav/src/Sim/util/eudm_planner/CMakeLists.txt:30 (catkin_package)
-- +++ processing catkin package: 'ssc_planner'
-- ==> add_subdirectory(Dftpav/src/Sim/util/ssc_planner)
-- Found OpenMP_C: -fopenmp (found version "4.5")
-- Found OpenMP_CXX: -fopenmp (found version "4.5")
-- Found OpenMP: TRUE (found version "4.5")
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
CMake Warning at /opt/ros/melodic/share/catkin/cmake/catkin_package.cmake:418 (message):
catkin_package() include dir
'/catkin_ws/build/Dftpav/src/Sim/util/ssc_planner' should be placed in the
devel space instead of the build space
Call Stack (most recent call first):
/opt/ros/melodic/share/catkin/cmake/catkin_package.cmake:102 (_catkin_package)
Dftpav/src/Sim/util/ssc_planner/CMakeLists.txt:28 (catkin_package)
-- +++ processing catkin package: 'traj_planner'
-- ==> add_subdirectory(Dftpav/src/Plan/traj_planner)
-- Found OpenMP_C: -fopenmp
-- Found OpenMP_CXX: -fopenmp
-- Found OpenMP: TRUE
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
CMake Error at Dftpav/src/Plan/traj_planner/CMakeLists.txt:16 (find_package):
By not providing "Findompl.cmake" in CMAKE_MODULE_PATH this project has
asked CMake to find a package configuration file provided by "ompl", but
CMake did not find one.
Could not find a package configuration file provided by "ompl" with any of
the following names:
omplConfig.cmake
ompl-config.cmake
Add the installation prefix of "ompl" to CMAKE_PREFIX_PATH or set
"ompl_DIR" to a directory containing one of the above files. If "ompl"
provides a separate development package or SDK, be sure it has been
installed.
-- Configuring incomplete, errors occurred!
See also "/catkin_ws/build/CMakeFiles/CMakeOutput.log".
See also "/catkin_ws/build/CMakeFiles/CMakeError.log".
Invoking "cmake" failed
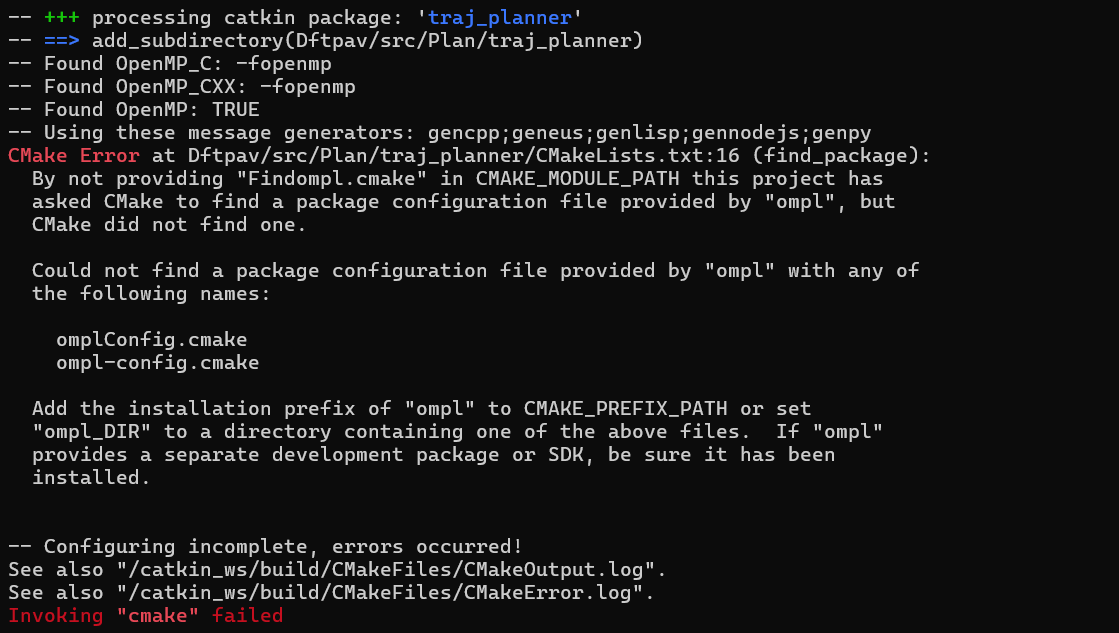
这是因为 OMPL 库缺失,一开始只想到安装 ros 相关的 ompl(AI 推荐)
bash
apt-get install -y ros-melodic-ompl但是,安装后,重新编译,又遇到下列问题:
-- +++ processing catkin package: 'planning_integrated'
-- ==> add_subdirectory(Dftpav/src/Sim/app/planning_integrated)
-- Could NOT find geographic_msgs (missing: geographic_msgs_DIR)
-- Could not find the required component 'geographic_msgs'. The following CMake error indicates that you either need to install the package with the same name or change your environment so that it can be found.
CMake Error at /opt/ros/melodic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by "geographic_msgs"
with any of the following names:
geographic_msgsConfig.cmake
geographic_msgs-config.cmake
Add the installation prefix of "geographic_msgs" to CMAKE_PREFIX_PATH or
set "geographic_msgs_DIR" to a directory containing one of the above files.
If "geographic_msgs" provides a separate development package or SDK, be
sure it has been installed.
Call Stack (most recent call first):
Dftpav/src/Sim/app/planning_integrated/CMakeLists.txt:11 (find_package)
-- Configuring incomplete, errors occurred!
See also "/catkin_ws/build/CMakeFiles/CMakeOutput.log".
See also "/catkin_ws/build/CMakeFiles/CMakeError.log".
Invoking "cmake" failed
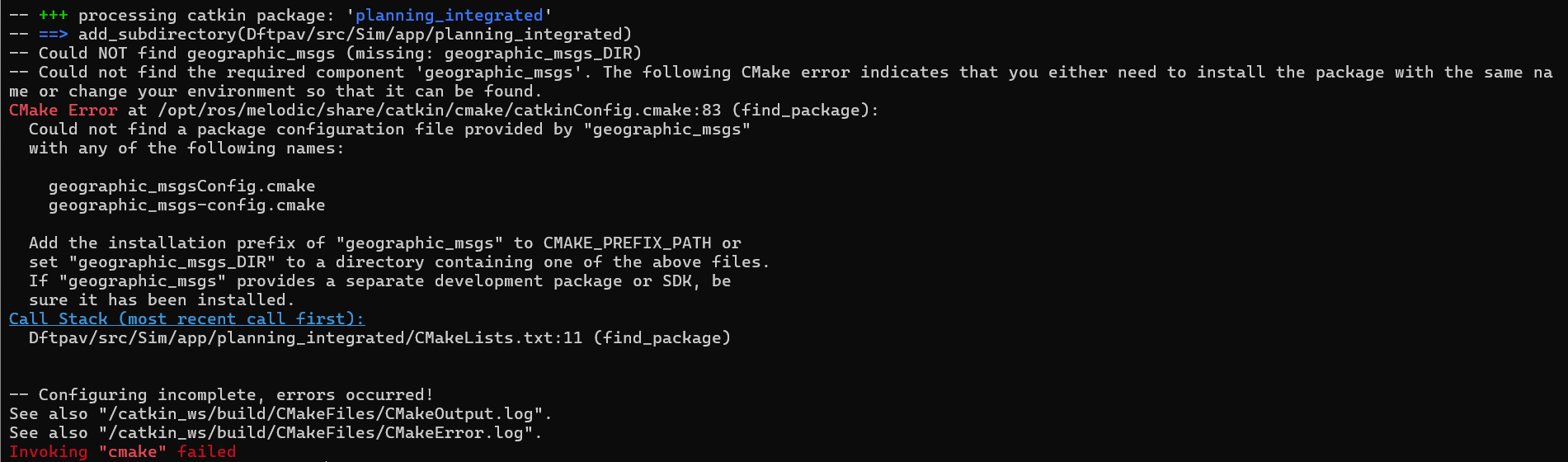
缺失很多包,一开始推测该项目很有可能是在 ROS Neotic 环境下实现的。
后面重新在 noetic 环境下运行该项目,还是遇到了同样的问题,缺失一些库。
说明无论是 ros melodic 还是 ros neotic 容器都缺少这些包。
安装好缺失的库
bash
apt install -y ros-melodic-ompl ros-melodic-geographic-msgs ros-melodic-tf2-sensor-msgs再次重新编译,还是遇到问题:
In file included from /catkin_ws/src/Dftpav/src/Plan/traj_planner/src/kino_astar.cpp:1:
/catkin_ws/src/Dftpav/src/Plan/traj_planner/include/path_searching/kino_astar.h:29:10: fatal errof95r: ompl/base/spaces/ReedsSheppStateSpace.h: No such file or directory
29 | #include <ompl/base/spaces/ReedsSheppStateSpace.h>
| ^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
compilation terminated.
make2: *** Dftpav/src/Plan/traj_planner/CMakeFiles/traj_planner.dir/build.make:113: Dftpav/src/Plan/traj_planner/CMakeFiles/traj_planner.dir/src/kino_astar.cpp.o Error 1
make2: *** Waiting for unfinished jobs...
In file included from /catkin_ws/src/Dftpav/src/Plan/traj_planner/include/plan_manage/traj_manager.h:33,
from /catkin_ws/src/Dftpav/src/Plan/traj_planner/src/traj_manager.cpp:1:
/catkin_ws/src/Dftpav/src/Plan/traj_planner/include/path_searching/kino_astar.h:29:10: fatal error: ompl/base/spaces/ReedsSheppStateSpace.h: No such file or directory
29 | #include <ompl/base/spaces/ReedsSheppStateSpace.h>
| ^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
compilation terminated.
make2: *** Dftpav/src/Plan/traj_planner/CMakeFiles/traj_planner.dir/build.make:87: Dftpav/src/Plan/traj_planner/CMakeFiles/traj_planner.dir/src/traj_manager.cpp.o Error 1
make1: *** CMakeFiles/Makefile2:4922: Dftpav/src/Plan/traj_planner/CMakeFiles/traj_planner.dir/all Error 2
make: *** Makefile:141: all Error 2
Invoking "make -j16 -l16" failed
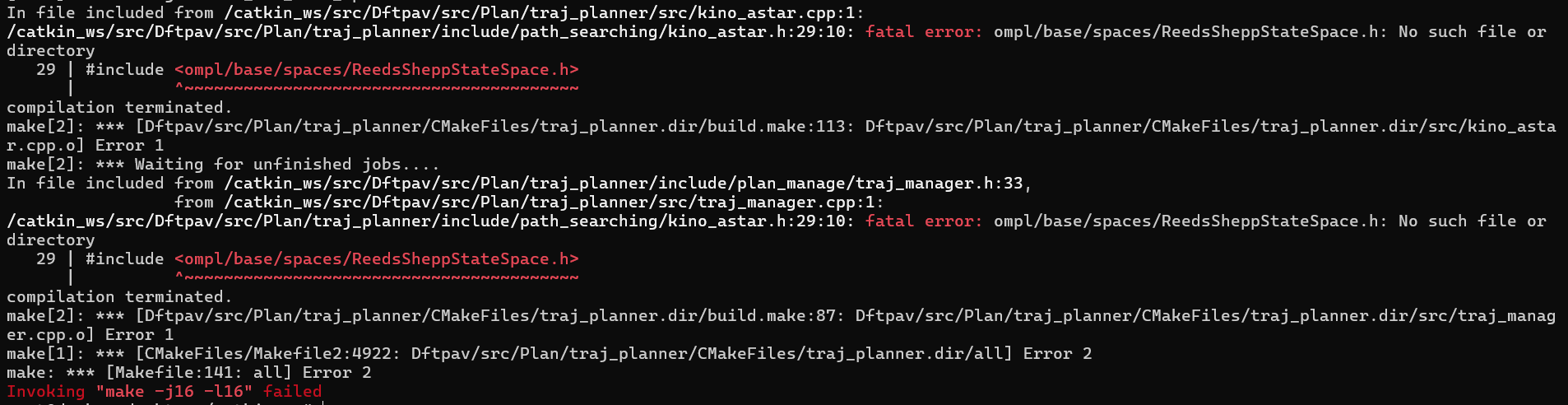
若只是在 include_directories 中添加 ${OMPL_INCLUDE_DIRS},则显示如下:

这说明头文件找不到的问题已经解决了!现在遇到的是链接错误,说明编译通过了,但在链接阶段找不到某些符号。
继续在 target_link_libraries 中添加 ${OMPL_LIBRARIES},但会遇到下图的问题
①

这是因为内存不足,导致编译器进程被系统杀死。
②

CMake 找到了 OMPL 的头文件,但链接时找不到对应的库文件 libompl.so。
已经在 CMakeLists.txt 中通过 message 确定了 OMPL 相关变量的位置正确,但还是有问题。
CMakeLists.txt
message(WARNING "========== OMPL_INCLUDE_DIRS: ${OMPL_INCLUDE_DIRS} ==============")
# ${OMPL_INCLUDE_DIRS} 为 /opt/ros/melodic/include/ompl-1.4
message(WARNING "========== OMPL_LIBRARIES: ${OMPL_LIBRARIES} ==============")
# /opt/ros/melodic/lib/libompl.so说明这里的链接应该是没问题的。
在 Dftpav github 的 issues 中发现下列提问:
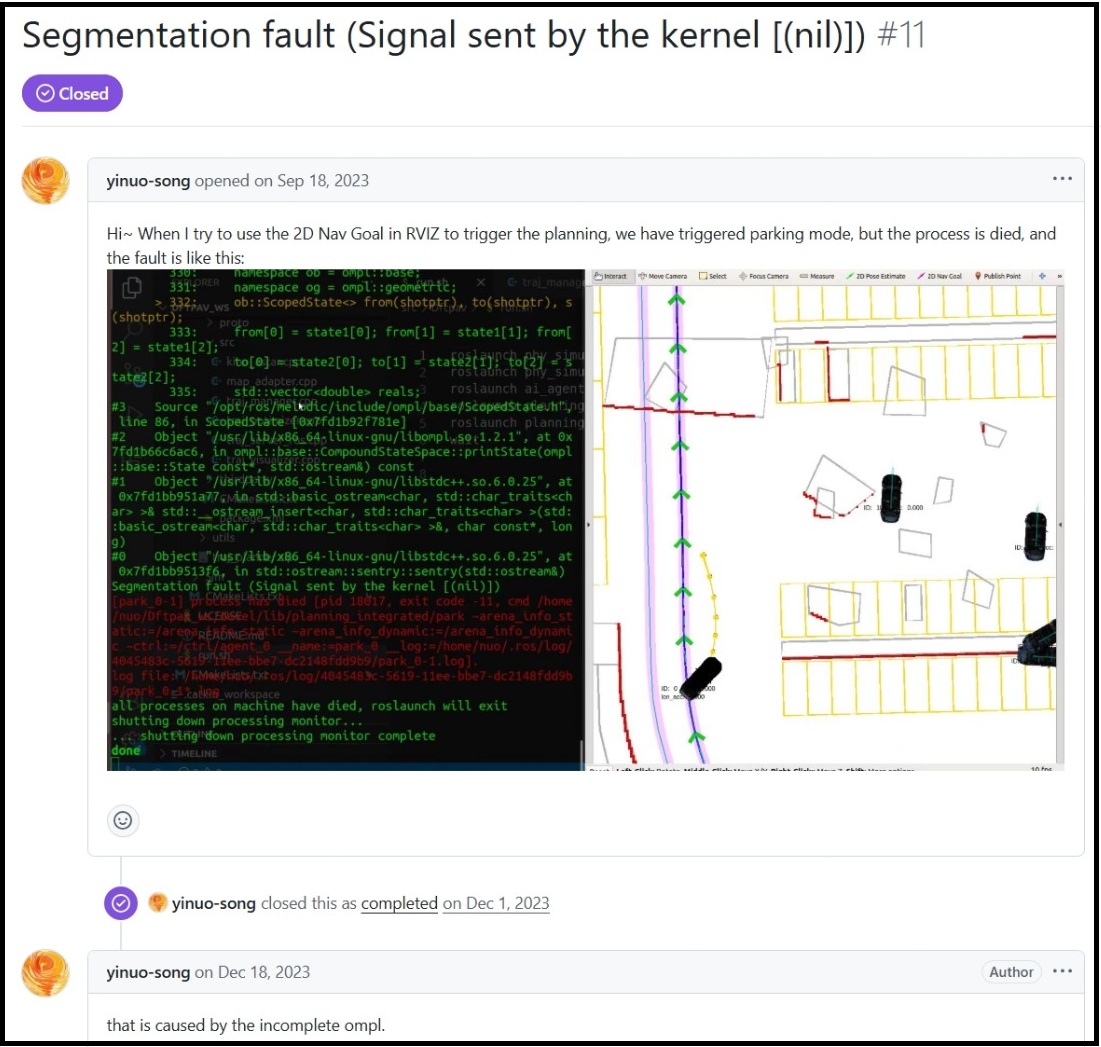
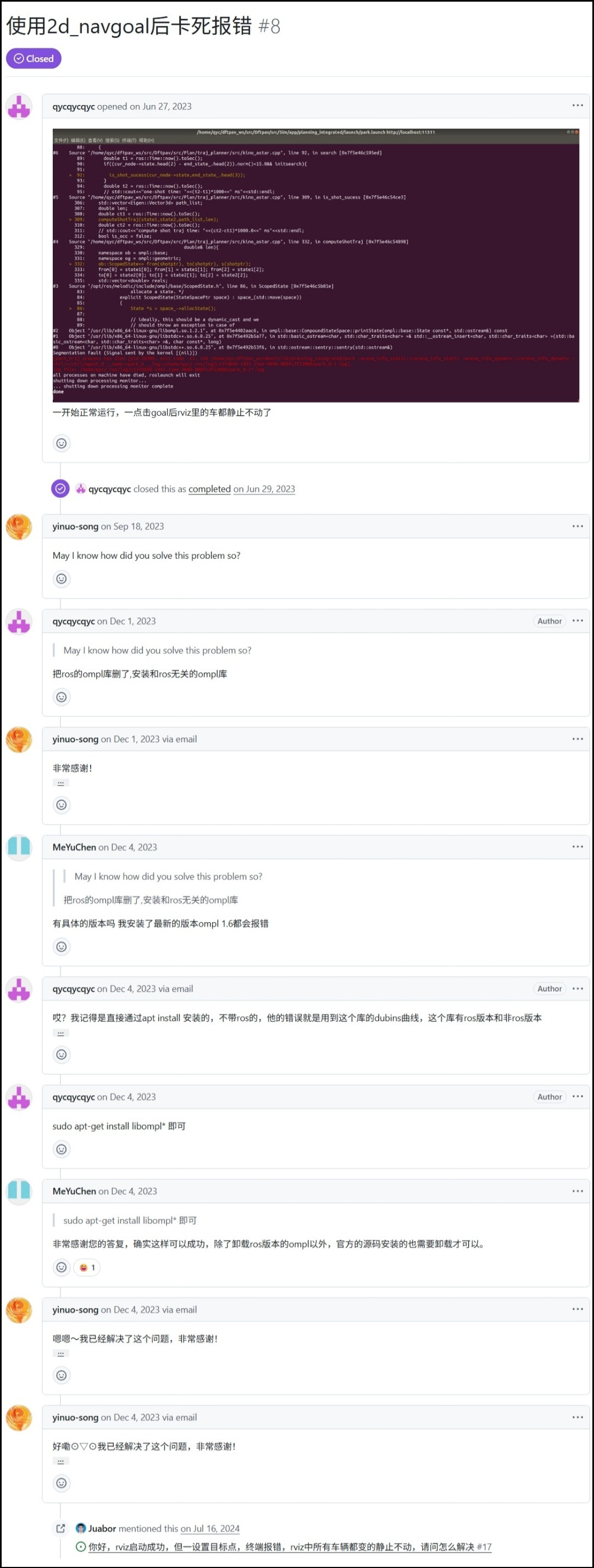
那么,需要 卸载 ros 版本的 ompl,直接通过 apt 安装和 ros 无关的 libompl* !
bash
# 卸载 ros-melodic-ompl
apt purge ros-melodic-ompl -y
apt autoremove
# 安装 libompl
apt install libompl* -y注意,libompl 后面需要添加星号 *,否则会显示 E: Unable to locate package libompl
将修改后的 CMakeLists.txt 还原(注释掉添加的两行);
2. 内存不足
(续接上文)
再删除掉之前的编译信息,重新编译:
bash
rm -rf /catkin_ws/build/ /catkin_ws/devel/
catkin_make -DCMAKE_BUILD_TYPE=Release此时,出现的问题是


这是因为 docker 容器的内存不足,导致编译器进程被系统杀死。
因此,采用更少的线程进行编译(缺点:耗时更长)。
bash
rm -rf /catkin_ws/build/ /catkin_ws/devel/
catkin_make -DCMAKE_BUILD_TYPE=Release -j4 -l4最终编译成功!

3. No map is update
(续接上文)
但在尝试运行时,还是遇到问题:


幸运的是,github issues 中有记载这个问题!
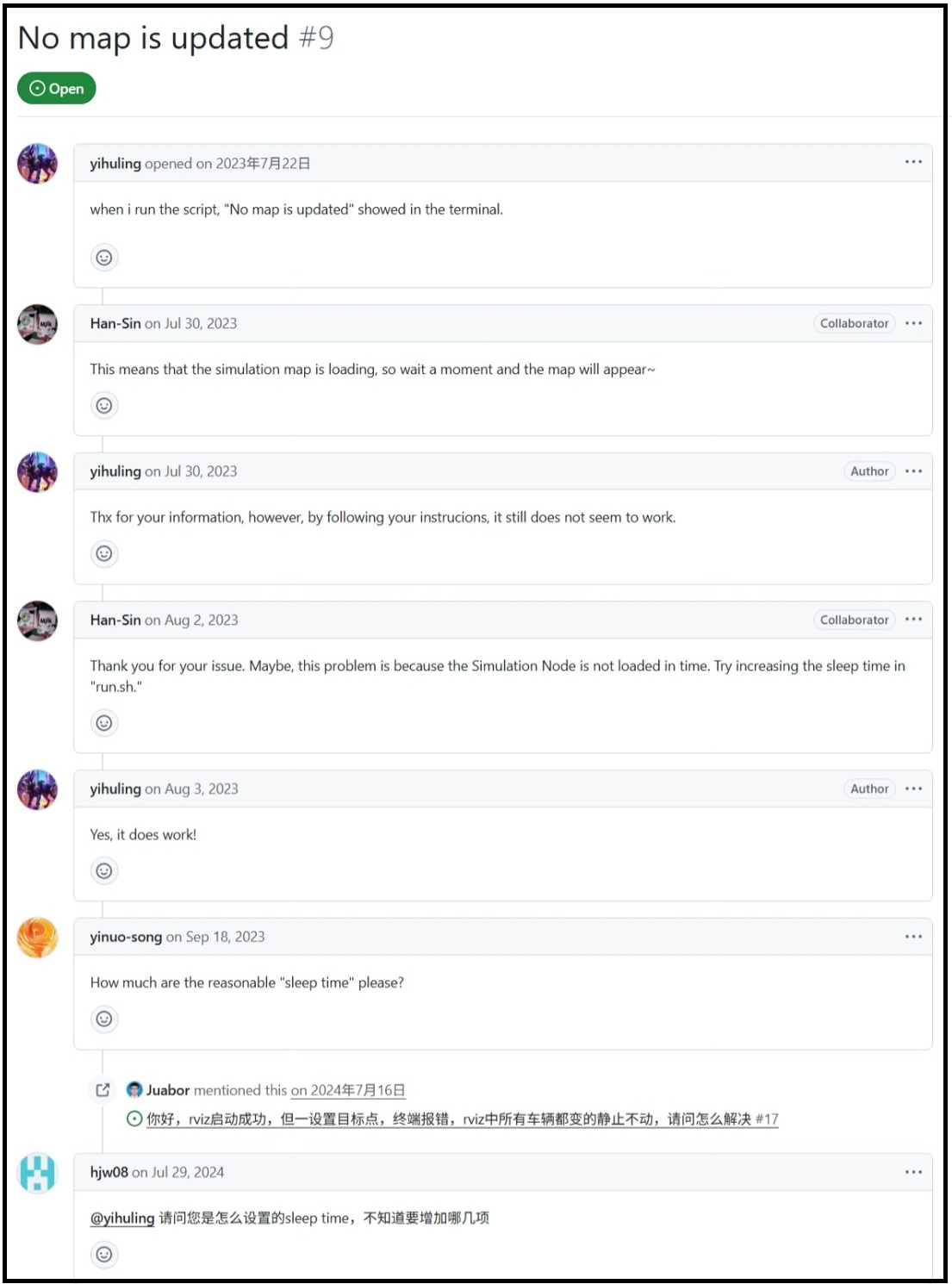
因此,直接在 run.sh 中将 sleep 1 修改成 sleep 5。
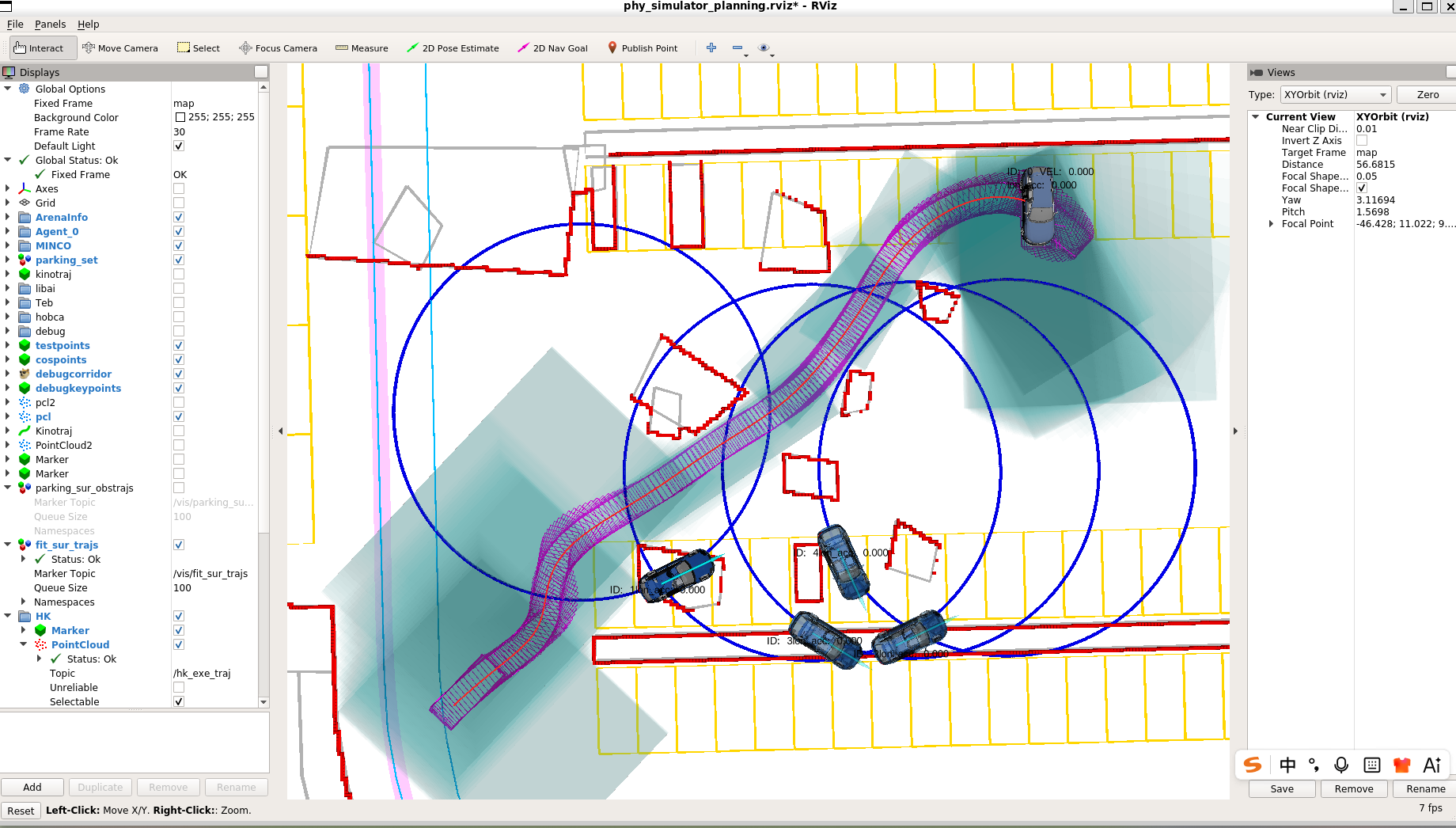
问题成功解决,点击 2D Nav Goal 启动规划,出现仿真界面如下:
(这接连两个问题,我认为可能是电脑的性能不够,在其它性能好的电脑上未必会出现这些问题。)
(确实,第二次换了一台 RTX 5060 的电脑,可以直接编译,直接运行!)
(第一次在 RTX 3060 的电脑上需要用更少的线程去编译、run.sh 中每条 roslaunch 指令需要的 sleep 时间也更长。)
(不过也有可能是因为 WSL 无法使用电脑全部资源的原因?因为第一次是在 wsl 环境,第二次直接在 linux 系统)