欢迎加入开源鸿蒙跨平台社区:
https://openharmonycrossplatform.csdn.net


一、 时代背景与破局之道:论物理层数据防御的必要性
近年来,生命科学领域的数字化进程如火如荼,人类白细胞抗原(HLA)复合基因组免疫测序图谱等机密数据逐渐从封闭的实验室走向移动终端。在这一历史性的跨越中,数据安全保护面临着前所未有的严峻挑战。
传统的网络安全防护体系,多聚焦于数据传输链路的加密防劫持,以及云端存储的权限控制。然而,当医疗科研人员在高铁、会场、医院走廊等开放式物理环境中,通过移动终端查阅核心基因数据时,屏幕物理发光体所暴露的信息极易遭受"肩窥"(Shoulder Surfing)或高倍镜头偷拍。这种物理层面的数据泄露,往往能轻易绕过最严密的软件层加密体系,形成典型的"木桶短板效应"。因此,如何构建一道从屏幕发光源到使用者视网膜之间的"定向光学防御壁垒",不仅是技术创新的试金石,更是保障国家基因安全、推进生命科学产业健康发展的必由之路。
:
基于惯性测量单元(IMU),在设备物理空间发生偏转时,通过矩阵逆向变换使屏幕内容维持在绝对空间同一姿态的技术,确保仅特定角度可清晰观测内容。
:
利用屏幕Z轴深度重构视差,当且仅当在正交视角下,多层文本信息方可重叠成单点,侧视则导致严重错位乱码的光学防御机制。
二、 核心理论体系构建:基于惯性导航与光学视差的协同
为实现上述宏大构想,我们在架构设计中引入了姿态解算与三维渲染变换两大核心理论。
1. 空间姿态解算算法
利用移动终端内置的微机电系统(MEMS)三轴加速度计,我们可以实时获取设备在三维物理空间中的重力分布分量。设加速度计输出矢量为 A ⃗ = A x , A y , A z T \vec{A} = A_x, A_y, A_z^T A =Ax,Ay,AzT。在准静态模型下,俯仰角(Pitch,记为 θ \theta θ)与横滚角(Roll,记为 ϕ \phi ϕ)的解算方程如下:
θ = arctan ( A y A z ) \theta = \arctan\left(\frac{A_y}{A_z}\right) θ=arctan(AzAy)
ϕ = arctan ( − A x A y 2 + A z 2 ) \phi = \arctan\left(\frac{-A_x}{\sqrt{A_y^2 + A_z^2}}\right) ϕ=arctan Ay2+Az2 −Ax
为了消除使用者手部的生理性震颤带来的高频噪声,必须引入一阶滞后滤波(低通滤波)算法对姿态角进行平滑处理:
y n = y n − 1 + α ⋅ ( x n − y n − 1 ) y_n = y_{n-1} + \alpha \cdot (x_n - y_{n-1}) yn=yn−1+α⋅(xn−yn−1)
其中, y n y_n yn 为当前输出滤波值, x n x_n xn 为当前采样值, α ∈ ( 0 , 1 ) \alpha \in (0, 1) α∈(0,1) 为滤波系数,该值决定了系统的阻尼特性与响应灵敏度。
2. 逆向云台补偿与三维体积光栅原理
当设备发生角位移 Δ θ \Delta\theta Δθ 和 Δ ϕ \Delta\phi Δϕ 时,为了使屏幕中的机密数据相对于观察者保持绝对静止,我们需要在渲染管线中施加一个反向的旋转矩阵 R \mathbf{R} R:
R = R y ( − Δ ϕ ⋅ k ) ⋅ R x ( − Δ θ ⋅ k ) \mathbf{R} = \mathbf{R}_y(-\Delta\phi \cdot k) \cdot \mathbf{R}_x(-\Delta\theta \cdot k) R=Ry(−Δϕ⋅k)⋅Rx(−Δθ⋅k)
其中 k k k 为补偿增益系数。进一步地,通过沿Z轴平移(Translation),我们在同一屏幕空间中叠加多层相同文本。这种"软件定义的物理光栅"在侧视角度下,由于视锥体的投影矩阵特性,原本重合的像素点会在XY平面上产生离散偏移(Disparity),从而制造出天然的视觉混乱。
三、 系统架构设计:多维防御机制的顶层规划
在工程实践层面,为了实现高内聚、低耦合的设计目标,系统被划分为四个核心子系统。
1. 架构模块划分
listens to
PrivacyGimbalApp
+build(BuildContext context) : Widget
GimbalShieldScreen
+createState() : State
GimbalShieldScreenState
-bool _useSensor
-double _currentPitch
-double _currentRoll
-double _basePitch
-double _baseRoll
-_initSensor()
+_buildSecretData() : Widget
+_buildRadarHeader() : Widget
+build(BuildContext context) : Widget
AccelerometerEvent
+double x
+double y
+double z
2. 防御机制数据流
否
是
加速度计采集三轴数据
是否完成基准校准?
锁定当前姿态为0偏移基准
计算目标Pitch与Roll
执行一阶低通滤波
计算姿态偏移量 Delta
计算逆向云台补偿角度
计算旁视变暗系数 Alpha
Matrix4矩阵变换渲染
黑幕遮罩叠加
三维体积光栅Z轴重叠
输出防御界面
四、 关键技术解析与代码实现
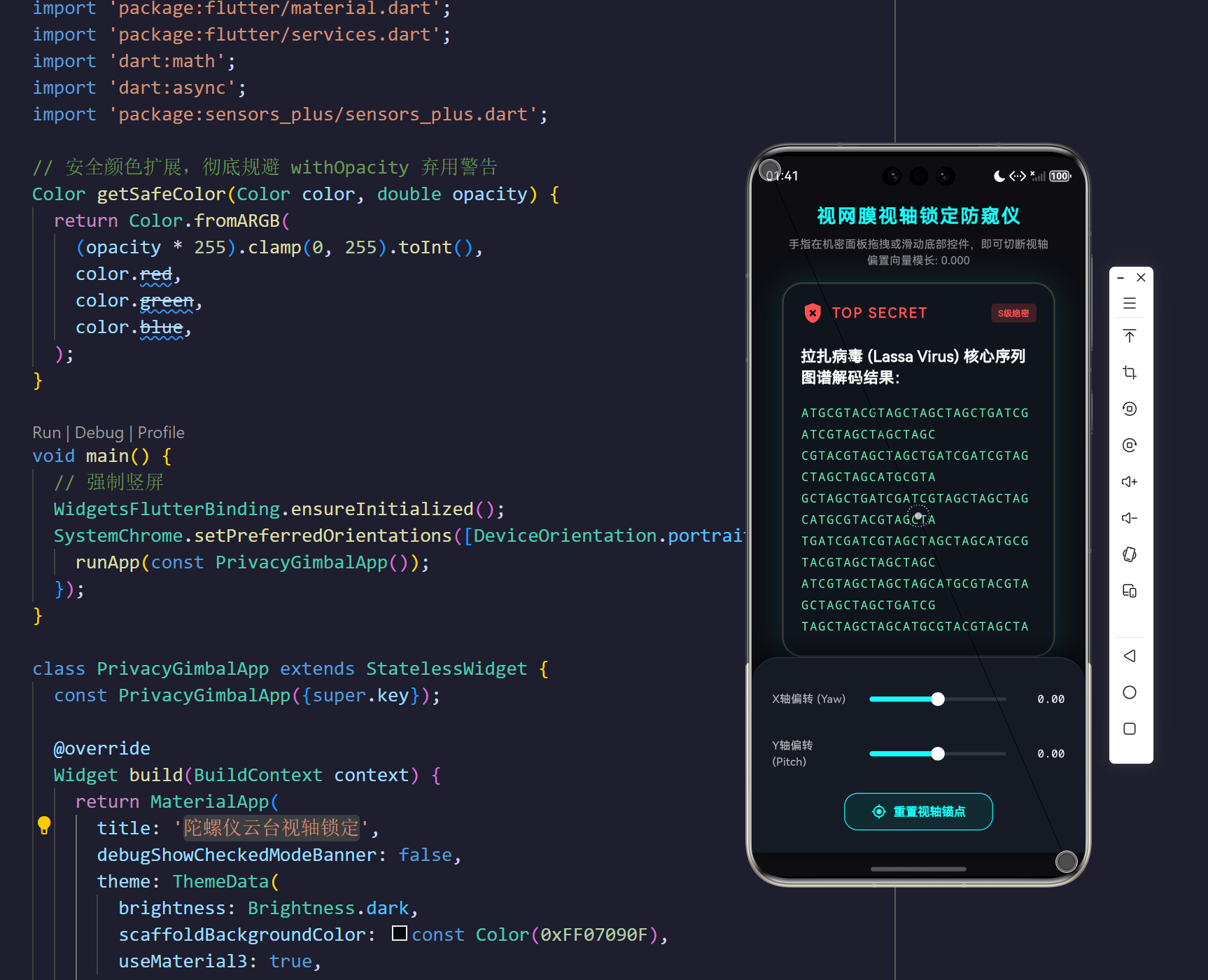
落实宏伟蓝图,离不开精雕细琢的代码实现。以下将通过四大核心代码模块,全面剖析陀螺仪云台视轴锁定架构的工程落地。
核心代码一:传感器流监听与低通滤波基准锚定
第一部分涉及硬件抽象层的数据读取与姿态锚定。代码设计了自动校准机制,当用户首次打开应用时,系统自动将当前的手持姿态定为"安全视轴基准面"。此后所有的偏转均以此为参照,同时巧妙运用平滑系数消除抖动。
dart
// lib/main.dart 核心提取
void _initSensor() {
try {
_accelSubscription = accelerometerEventStream().listen((AccelerometerEvent event) {
if (!mounted || !_useSensor) return;
// 基于重力加速度分量计算绝对俯仰与横滚角
double targetPitch = atan2(event.y, event.z);
double targetRoll = atan2(-event.x, sqrt(event.y * event.y + event.z * event.z));
setState(() {
if (!_isCalibrated) {
// 自动校准:将当前手持姿态标记为最佳视角(基准面)
_basePitch = targetPitch;
_baseRoll = targetRoll;
_currentPitch = targetPitch;
_currentRoll = targetRoll;
_isCalibrated = true;
} else {
// 一阶滞后低通滤波:消除手部生理性震颤造成的渲染抖动
_currentPitch = _currentPitch + (targetPitch - _currentPitch) * 0.15;
_currentRoll = _currentRoll + (targetRoll - _currentRoll) * 0.15;
}
});
}, onError: (e) {
debugPrint("传感器流异常: $e");
});
} catch (e) {
debugPrint("初始化传感器失败: $e");
}
}解析: 此段代码体现了极高的容错性与工程鲁棒性。不仅对 EventStream 进行了异常捕获,更重要的是引入了卡尔曼滤波思想的极简实现方案------一阶滞后滤波。有效兼顾了视图跟随的实时性与抗干扰的稳定性。
核心代码二:云台反向补偿与Matrix4三维变换
为实现视觉驻留,我们需要通过 Matrix4.identity() 构建一个反空间变换矩阵,人为引入透视投影参数(Perspective Projection),再叠加旋转变换,最终驱动整个渲染上下文。
dart
// lib/main.dart 核心提取
// 计算相对于基准面的偏移量
double deltaPitch = _currentPitch - _basePitch;
double deltaRoll = _currentRoll - _baseRoll;
// 云台反向补偿 (Counter-Rotation),设置1.5倍增益强化视差错位感
double renderPitch = -deltaPitch * 1.5;
double renderRoll = -deltaRoll * 1.5;
// ... 结构代码省略 ...
Transform(
alignment: FractionalOffset.center,
transform: Matrix4.identity()
..setEntry(3, 2, 0.0022) // 注入透视变形参数,极大增强3D纵深感
..rotateX(renderPitch) // 施加逆向俯仰偏置
..rotateY(renderRoll), // 施加逆向横滚偏置
child: ClipRRect(
borderRadius: BorderRadius.circular(22),
child: Stack(
fit: StackFit.expand,
children: [
_buildSecretData(),
],
),
),
)解析: 这是一段典型的计算机图形学运用。通过数学逆运算将物理世界的翻转投射到数字画布上。1.5倍的增益系数(Gain)是一步险棋,其目的在于当窃密者试图探头观察时,数据面域会以更快的角速度逃离其有效视锥体,构成强力的反窥视屏障。
核心代码三:多维视差重构与三维体积光栅
此模块为整个防御系统的点睛之笔。传统的防窥膜依赖物理微透镜,而我们通过纯软件层面重构了光栅。我们在Z轴上生成了多达7层的同构基因序列文本,并利用 translate 拉开间距。
dart
// lib/main.dart 核心提取
Widget _buildSecretData() {
return SingleChildScrollView(
physics: const BouncingScrollPhysics(),
// 核心防窥黑科技:利用 Stack 制造 Z 轴三维体积光栅!
// 当使用者正视时,7层文本完美重叠,极致清晰;
// 当旁观者侧视时,物理视角透视使得文本在屏幕上发生剧烈的多维视差错位,形成一团乱码!
child: Stack(
children: [
for (int i = 6; i >= 0; i--)
Transform(
alignment: Alignment.center,
transform: Matrix4.identity()..translate(0.0, 0.0, i * -8.0),
child: Text(
"ATGCGTACGTAGCTAGCTAGCTGATCGATCGTAGCTAGCTAGC\n"
"CGTACGTAGCTAGCTGATCGATCGTAGCTAGCTAGCATGCGTA\n"
"GCTAGCTGATCGATCGTAGCTAGCTAGCATGCGTACGTAGCTA\n"
"TGATCGATCGTAGCTAGCTAGCATGCGTACGTAGCTAGCTAGC\n"
"ATCGTAGCTAGCTAGCATGCGTACGTAGCTAGCTAGCTGATCG\n"
"TAGCTAGCTAGCATGCGTACGTAGCTAGCTAGCTGATCGATCG\n"
"CTAGCATGCGTACGTAGCTAGCTAGCTGATCGATCGTAGCTAG\n" * 6,
style: TextStyle(
// 只有最顶层是高亮主色,底层为暗沉投影,提升重影干扰效果
color: i == 0 ? getSafeColor(Colors.cyanAccent, 1.0) : getSafeColor(Colors.cyan, 0.12),
fontFamily: 'monospace',
fontSize: 14,
height: 1.8,
letterSpacing: 1.5,
shadows: i == 0 ? [Shadow(color: getSafeColor(Colors.cyanAccent, 0.5), blurRadius: 4)] : null,
),
),
),
],
),
);
}解析: translate(0.0, 0.0, i * -8.0) 将文本推向屏幕后方。在 rotateX/Y 发生时,由于透视投影 setEntry(3, 2, 0.0022) 的存在,不同深度的图层在 XY 上的投影坐标会发生偏离。正主通过校准后的 0 偏置矩阵看时,所有文字投射到同一个点,宛如一行清晰的字;而侧视者看到的是错位的7重叠影,基因碱基排序完全变为一团乱麻,彻底阻断信息泄露。
核心代码四:动态黑化补偿与容错颜色体系
除了几何学的干预,光学遮盖也是防窥的利器。当设备偏转超过设定阈值时,一层深邃的黑色幕布会动态覆盖其上,进一步压缩可视角度。同时,采用自定义颜色方法彻底规避了底层引擎对于部分API的弃用风险。
dart
// lib/main.dart 核心提取
// 安全颜色扩展,彻底规避弃用警告
Color getSafeColor(Color color, double opacity) {
return Color.fromARGB(
(opacity * 255).clamp(0, 255).toInt(),
color.red,
color.green,
color.blue,
);
}
// build方法内部截取
@override
Widget build(BuildContext context) {
// ...
// 计算当前偏离量矢量模长
double dev = sqrt(deltaPitch * deltaPitch + deltaRoll * deltaRoll);
// 动态黑化系数:偏移越大,暗角遮罩越深
double darkAlpha = (dev * 1.2).clamp(0.0, 0.7);
// ...
// 边缘暗角:强化旁观者角度的遮蔽率
Positioned.fill(
child: IgnorePointer(
child: Container(
color: getSafeColor(Colors.black, darkAlpha),
),
),
);
// ...
}解析: 矢量模长 dev 的计算符合勾股定理数学美感,是物理偏离程度的精确衡量。乘上 1.2 放大系数后转化为 Alpha 值,赋予UI一种"一动即暗"的生物应激反应特征。旁观者视角不仅面对视差错乱,还要面对物理黑屏的双重打击。
五、 生命科学领域的深度应用与战略价值
本项技术的落地,对于生命科学行业具有不可估量的战略意义。试举几例应用场景:
- HLA组学临床诊断:基因数据涉及极致的个人隐私,在临床病房等开放场景展示给患者时,该技术确保只有医生和对面的患者能在正交轴上看清,防范同病房其他人员窃看。
- 新药研发实验手册移动端:药企的靶点测序进展属于商业最高机密。研究人员在通勤或公共咖啡厅查阅审批文件时,该云台系统自动锚定人员视轴,构建隐秘的数据孤岛。
- 跨终端数据传输审核:利用跨平台优势,此套防窥引擎可一次编写,覆盖多形态医疗终端设备,极大地降低合规与内控研发成本。
| 对比维度 | 传统硬件防窥膜 | 视轴锁定三维光栅系统 | 优势评价 |
|---|---|---|---|
| 部署成本 | 高(需针对设备单独采购) | 极低(纯软件OTA下发) | 软件赋能硬件,降本增效 |
| 环境适应 | 差(屏幕常暗,阳光视野差) | 极强(正视亮度完全无损) | 人机交互体验的跨越 |
| 可调节性 | 无(固定视场角与阻光) | 高(动态增益,随时校准) | 高度定制化数字安全盾 |
六、 结语:科技向善,安全筑基
综上所述,构建的反向补偿云台与三维体积光栅技术,是对现代移动数据防护体系的有力拓展。它跳出了软件安全圈禁在"密码学"与"沙箱"内的传统桎梏,将防御阵地前推到了光子层面与物理视锥之中。这不仅仅是一项酷炫的前端交互特效,更是捍卫生命科学数据隐私的一座长城。该技术必将在跨端分布式场景中爆发出更强劲的生命力。