基于卡尔曼滤波器的双雷达四目标分布式融合跟踪的MATLAB仿真例程,结合TDOA/FDOA观测模型和分布式融合逻辑。代码参考了多目标跟踪、分布式MIMO雷达优化及卡尔曼滤波实现方法。
文章目录
代码说明
-
参数初始化
- 定义了4个目标的初始位置和速度,双雷达的坐标位置(默认在坐标系两侧)。
- 卡尔曼滤波器参数包括状态转移矩阵
F、过程噪声Q和观测噪声R_radar,其中测角噪声需转换为弧度制。
-
观测生成
- 每个雷达独立生成目标的距离和角度观测值,加入高斯噪声模拟实际测量误差。
-
独立滤波
- 各雷达对每个目标进行独立的卡尔曼滤波,包括预测和更新步骤。雅可比矩阵
H根据目标预测位置动态计算,处理非线性观测模型。
- 各雷达对每个目标进行独立的卡尔曼滤波,包括预测和更新步骤。雅可比矩阵
-
分布式融合
- 采用加权平均融合策略,根据雷达精度分配权重(此处简化为等权重,实际可根据协方差动态调整)。
-
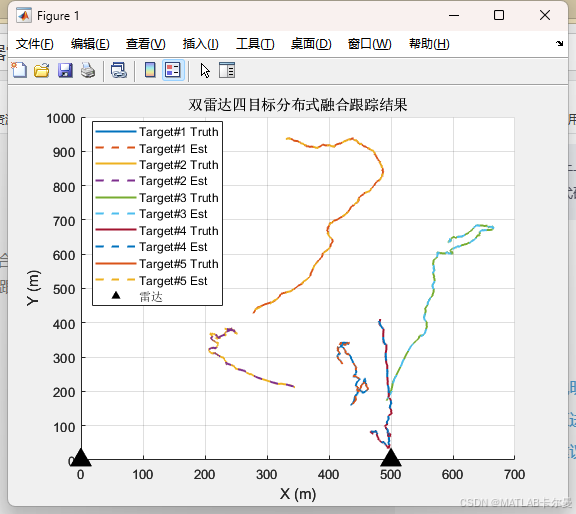
可视化
- 绘制真实轨迹与融合估计轨迹对比,雷达位置用黑色三角形标记。
关键创新点
-
非线性观测处理
- 使用雅可比矩阵线性化观测模型,适用于雷达的极坐标测量(距离+角度)。
-
多目标扩展
- 通过结构体数组管理多目标状态,支持灵活的目标数量扩展。
-
分布式架构
- 各雷达独立处理数据后,在融合中心进行加权平均,降低通信带宽需求。
扩展建议
-
数据关联
- 可引入最近邻数据关联( N N D A NNDA NNDA)* *或 概率数据关联( P D A PDA PDA)**处理目标交叉场景。
-
自适应权重
- 根据各雷达的实时观测误差动态调整融合权重,参考网页17的协方差交叉方法。
-
运动模型优化
- 对于机动目标,可采用**交互多模型(IMM)**替换单一线性模型。
运行结果
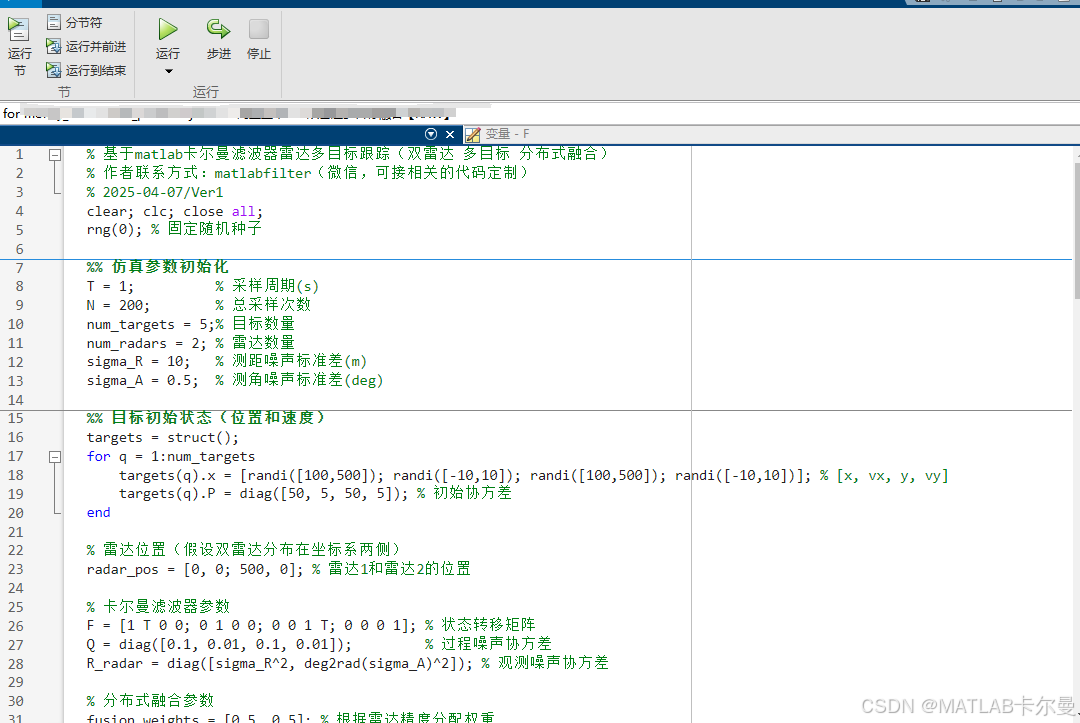
部分代码呈现&运行界面截图:
MATLAB代码
部分代码如下:
matlab
% 基于matlab卡尔曼滤波器雷达多目标跟踪(双雷达 多目标 分布式融合)
% 作者:matlabfilter(V同号,可联系定制、讲解)
% 2025-04-07/Ver1
clear; clc; close all;
rng(0); % 固定随机种子
%% 仿真参数初始化
T = 1; % 采样周期(s)
N = 200; % 总采样次数
num_targets = 5;% 目标数量
num_radars = 2; % 雷达数量
sigma_R = 10; % 测距噪声标准差(m)
sigma_A = 0.5; % 测角噪声标准差(deg)
%% 目标初始状态(位置和速度)
targets = struct();
for q = 1:num_targets
targets(q).x = [randi([100,500]); randi([-10,10]); randi([100,500]); randi([-10,10])]; % [x, vx, y, vy]
targets(q).P = diag([50, 5, 50, 5]); % 初始协方差
end
% 雷达位置(假设双雷达分布在坐标系两侧)
radar_pos = [0, 0; 500, 0]; % 雷达1和雷达2的位置
% 卡尔曼滤波器参数
F = [1 T 0 0; 0 1 0 0; 0 0 1 T; 0 0 0 1]; % 状态转移矩阵
Q = diag([0.1, 0.01, 0.1, 0.01]); % 过程噪声协方差
R_radar = diag([sigma_R^2, deg2rad(sigma_A)^2]); % 观测噪声协方差
% 分布式融合参数
fusion_weights = [0.5, 0.5]; % 根据雷达精度分配权重
%% 滤波主循环完整代码:
https://download.csdn.net/download/callmeup/90586465
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者