摘要: 在复杂的楼宇自动化架构中,让自主移动机器人能够呼叫服役多年的老旧电梯,常常面临巨大的工程阻力。依赖 API 或数据总线对接的传统方案,在面对无数字接口的老旧 OT 系统时常常失效。本文深度拆解底层软硬件解耦的通信架构,探讨如何通过引入外部硬件节点,利用 GPIO 驱动与外部传感器状态机,绕过主板更换,实现机器人梯控 系统的高效敏捷部署。
导语: 优秀的系统架构不仅要技术过硬,更要具备面对陈旧基础设施时的向下兼容可行性。通过非侵入式设计剥离对封闭系统的依赖,为老旧设施的多机协同业务提供了专业的机器人梯控 参考范式。
从总线依赖到硬件解耦的机器人梯控 架构革新

一、 架构痛点:协议逆向工程与老旧主板的僵局 如果坚持走软件接口对接的路线,面对十几年前的闭源电梯主板,工程师通常无法拿到有效的通信协议。更换电梯主控板又面临高昂的成本和冗长的安全审批。 高效的架构规范要求解耦:将 IT(机器人网络)与 OT(电梯运行)在控制层物理断开。利用部署在本地的边缘控制节点,将网络下发的 JSON 载荷,直接降维映射为对底层 GPIO 继电器的电平驱动,从而跳过所有的协议破译环节。
二、 状态机构建:抛弃总线,自建闭环反馈网络 没有了主板协议数据,系统如何得知轿厢的精确位置与门机状态? 必须在硬件侧部署基于外部传感器的独立状态机:
- 通过高速数字输入通道(DI)采集外挂传感器的物理脉冲信号。
- 利用防抖算法确认电平稳定后,状态机推进至下一阶段(如:等待门开 -> 允许驶入)。由于是纯物理状态采集,无需复杂的解码,联调时间被大幅压缩。
三、 核心代码实战:基于外围反馈的生产级状态驱动设计 为了保障工业环境下的高可用性,下面的 Python 生产级示例代码引入了基于事件循环(Event Loop)与状态机的机制。相比于简单的死循环阻塞,这种设计能有效处理传感器信号的防抖(Debouncing)以及长延时的异常恢复:
Python
import logging
import time
import threading
logging.basicConfig(level=logging.INFO, format='%(asctime)s - [ELEVATOR_FSM] - %(message)s')
class LegacyElevatorState:
IDLE = 0
MOVING = 1
ARRIVED = 2
FAULT = 3
class HardwareAbstractionLayer:
"""硬件抽象层,用于模拟 GPIO 操作"""
def __init__(self):
self.sensor_pin_state = False
def read_floor_sensor(self):
# 读取外挂轿顶传感器的物理高低电平
# 真实环境中将调用 RPi.GPIO 或类似底层库
return self.sensor_pin_state
def activate_relay(self, floor_number, duration=0.5):
logging.info(f"HAL: Activating relay for Floor {floor_number} (duration: {duration}s)")
time.sleep(duration)
logging.info(f"HAL: Relay deactivated.")
class LegacyElevatorController:
def __init__(self):
self.hal = HardwareAbstractionLayer()
self.current_state = LegacyElevatorState.IDLE
self.target_floor = None
self.debounce_window = 3 # 需要连续 3 次检测到高电平才确认平层
self.lock = threading.Lock()
def _verify_sensor_with_debounce(self):
"""防抖滤波逻辑:处理老旧电梯运行震动引起的毛刺电平"""
consecutive_highs = 0
for _ in range(5):
if self.hal.read_floor_sensor():
consecutive_highs += 1
time.sleep(0.1)
return consecutive_highs >= self.debounce_window
def dispatch_robot_call(self, target_floor, timeout=45):
"""非阻塞的主业务调用方法"""
with self.lock:
if self.current_state != LegacyElevatorState.IDLE:
logging.warning("Elevator is currently busy.")
return False
self.target_floor = target_floor
self.current_state = LegacyElevatorState.MOVING
logging.info(f"Dispatching to Floor {target_floor}. Emulating button press.")
# 1. 触发老旧电梯继电器
self.hal.activate_relay(target_floor)
# 2. 进入状态机轮询,等待传感器闭环
start_time = time.time()
while time.time() - start_time < timeout:
if self._verify_sensor_with_debounce():
with self.lock:
self.current_state = LegacyElevatorState.ARRIVED
logging.info(f"Arrival confirmed at Floor {target_floor} via external sensor.")
self._reset_state()
return True
time.sleep(0.5) # 降低 CPU 轮询负载
with self.lock:
self.current_state = LegacyElevatorState.FAULT
logging.error("Timeout: Failed to detect arrival. Moving to FAULT state.")
self._reset_state()
return False
def _reset_state(self):
with self.lock:
self.current_state = LegacyElevatorState.IDLE
self.target_floor = None
if __name__ == "__main__":
controller = LegacyElevatorController()
# 模拟由于老电梯速度慢,传感器需要较长时间才反馈信号
def simulate_elevator_movement():
time.sleep(4)
controller.hal.sensor_pin_state = True
threading.Thread(target=simulate_elevator_movement).start()
# 发起楼层呼叫
success = controller.dispatch_robot_call(target_floor=8)
if success:
logging.info("Robot entering cabin.")
else:
logging.warning("Initiating fallback protocol.")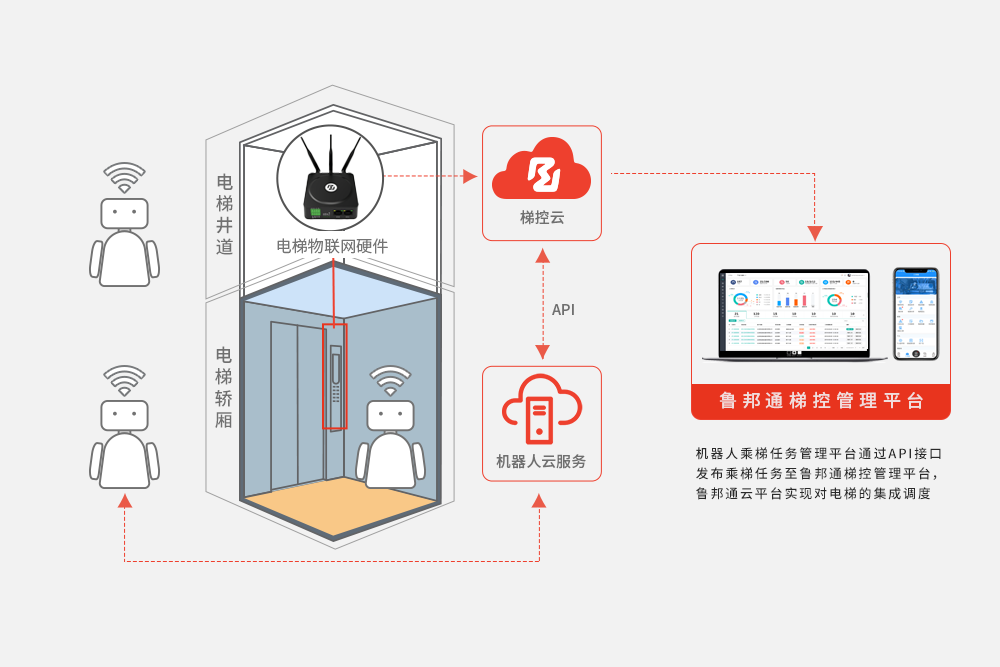
常见问题解答 (FAQ)
问题 1、这种解耦架构在处理海量请求时会有性能瓶颈吗?
回答 1、不会。由于绕过了繁琐的报文解析和校验和计算,纯粹的 GPIO 中断响应和继电器驱动消耗的算力微乎其微,系统的吞吐能力完全取决于底层继电器与老旧机械结构的物理响应速度。
问题 2、外部传感器引入的机械抖动导致误判怎么办?
回答 2、如上述代码所示,在读取物理传感器电平时,固件必须加入防抖窗(Debounce Window)与滑动平均滤波逻辑。只有连续 N 次采样均为高电平,才认为状态稳定,防止因轿厢晃动产生误触发。
问题 3、后续如何进行系统的版本迭代与运维?
回答 3、控制节点支持网络 OTA 远程升级。由于核心业务逻辑已经通过硬件解耦集中在了外部控制节点上,后续优化状态机或防抖参数只需通过网络推送脚本,无需机电人员再次打开电梯控制柜。
总结: 跨越老旧设施改造成本陷阱的关键在于果断切断对封闭主板的依赖。通过部署外挂控制节点重构物理闭环,工业级架构能够帮助实施团队在缺乏数字接口的环境下,快速构筑起稳健的机器人梯控 数据底座。