在智慧城市与工业运维需求日益提升的背景下,AI管道检测机器人作为保障地下管网安全、实现智能巡检的核心设备,其性能直接决定了移动灵活性、检测稳定性和长期续航能力。电源与电机驱动系统是机器人的"心脏与肌肉",负责为行走/转向电机、云台、传感器、计算单元及照明等关键负载提供精准、高效的电能转换与控制。功率MOSFET的选型,深刻影响着系统的转换效率、功率密度、热管理及整机可靠性。本文针对AI管道检测机器人这一对空间、效率、散热与可靠性要求严苛的应用场景,深入分析关键功率节点的MOSFET选型考量,提供一套完整、优化的器件推荐方案。
MOSFET选型详细分析
- VBQF1606 (N-MOS, 60V, 30A, DFN8(3x3))
角色定位:主驱动电机(直流有刷/BLDC)的H桥或逆变桥核心开关
技术深入分析:
电压应力与驱动能力:机器人驱动电机通常采用24V或48V电池供电。选择60V耐压的VBQF1606提供了充足的电压裕度,能有效应对电机启停、堵转时产生的反电动势尖峰。其高达30A的连续电流能力和低至5mΩ (@10V)的导通电阻,确保了在驱动轮系或履带时的极低导通损耗,直接提升续航里程和输出扭矩。
功率密度与热管理:采用先进的Trench技术和DFN8(3x3)小型封装,在实现超大电流能力的同时,极大节省了PCB空间,契合机器人内部高度集成的需求。其封装底部具有裸露焊盘,可通过PCB敷铜高效散热,满足紧凑空间下的热管理要求。
动态性能:低栅极电荷特性支持高频PWM控制,实现电机平滑调速与精准制动,保障机器人在复杂管道内运动的稳定性和可控性。
- VBC6N2005 (Common Drain N+N MOSFET, 20V, 11A, TSSOP8)
角色定位:多路低压负载的电源路径管理与分配开关(如传感器、MCU、通信模块)
精细化电源与功能管理:
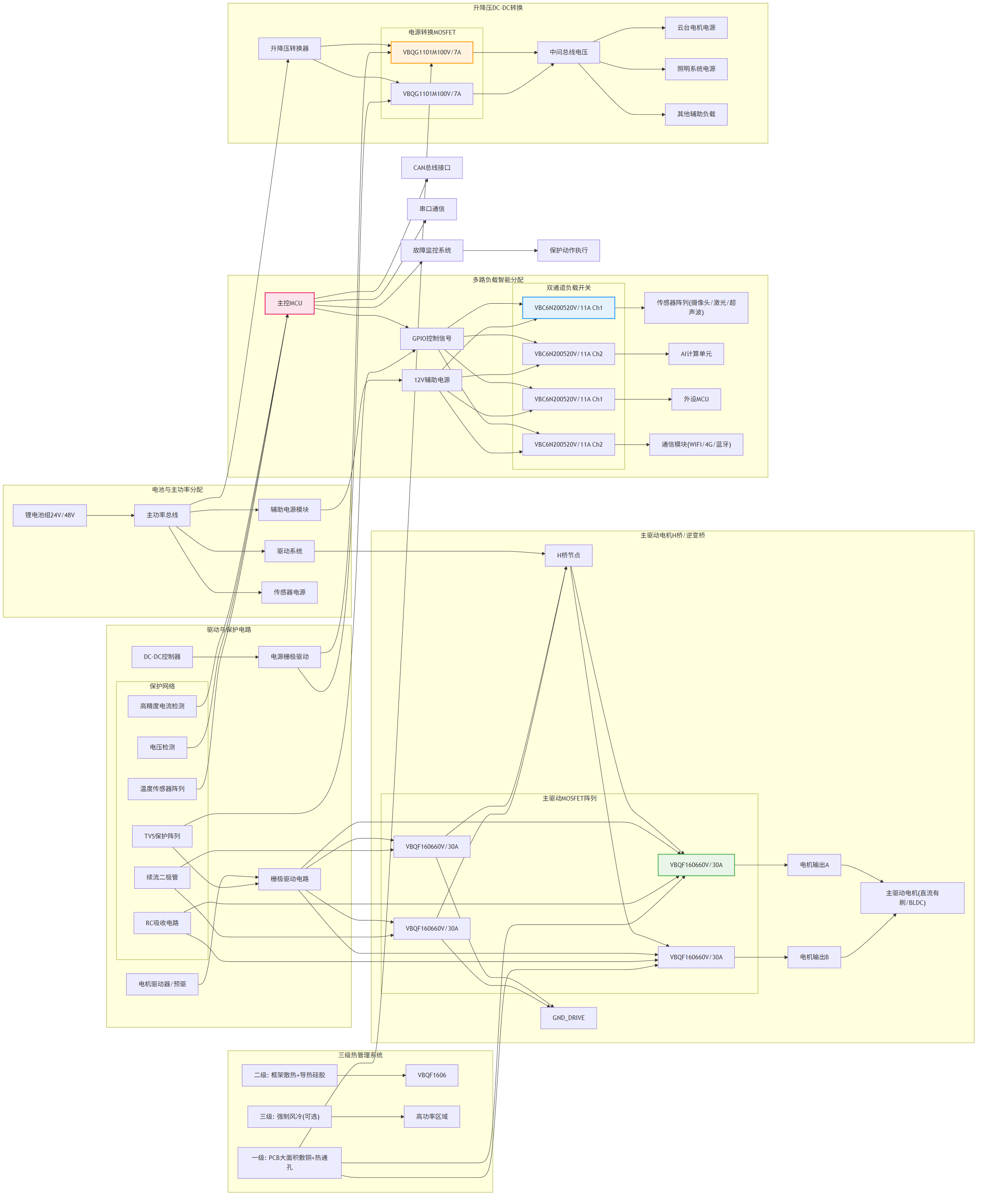
图1: AI管道检测机器人方案与适用功率器件型号分析推荐VBQF1606与VBC6N2005与VBQG1101M与产品应用拓扑图_01_total
高集成度电源分配:采用TSSOP8封装的共漏极双N沟道MOSFET,集成两个参数一致的20V/11A MOSFET。其20V耐压完美适配3.3V、5V、12V等低压总线。该器件可用于独立控制两路核心负载的电源通断,实现基于任务模式的智能功耗管理(如间歇性开启高功耗传感器),比使用两个分立器件节省大量空间。
高效节能管理:其超低的导通电阻(低至5mΩ @4.5V, 7mΩ @2.5V)确保了在导通状态下,电源路径上的压降和功耗极低,尤其有利于延长电池在待机或低功耗模式下的使用时间。共漏极配置便于用作低侧开关,由MCU GPIO直接高效驱动。
系统可靠性:双路独立控制允许系统在检测到某一路负载短路或过流时,快速切断其供电,而不影响另一路关键系统(如主控)的运行,提升了系统的容错能力和安全性。
- VBQG1101M (N-MOS, 100V, 7A, DFN6(2x2))
角色定位:升降压DC-DC转换器主开关或辅助动力单元(如云台电机、照明)驱动
扩展应用分析:
灵活电源转换核心:机器人系统中常需要升降压电源为不同电压等级的负载供电。100V的耐压为基于24V或48V母线的Boost或Buck-Boost拓扑提供了充足裕量。其7A电流能力和75mΩ (@10V)的导通电阻,平衡了效率与成本,是中等功率辅助电源模块的理想选择。
极致紧凑化设计:DFN6(2x2)超小封装代表了当前功率器件微型化的前沿,允许将其布置在极其有限的空間内,例如云台控制板或集中式电源模块中,有助于实现机器人模块的微型化。
动态性能与可靠性:Trench技术保证了开关的快速性与可靠性,适用于数百kHz的开关频率,有助于减少周边电感、电容体积,进一步提升功率密度。
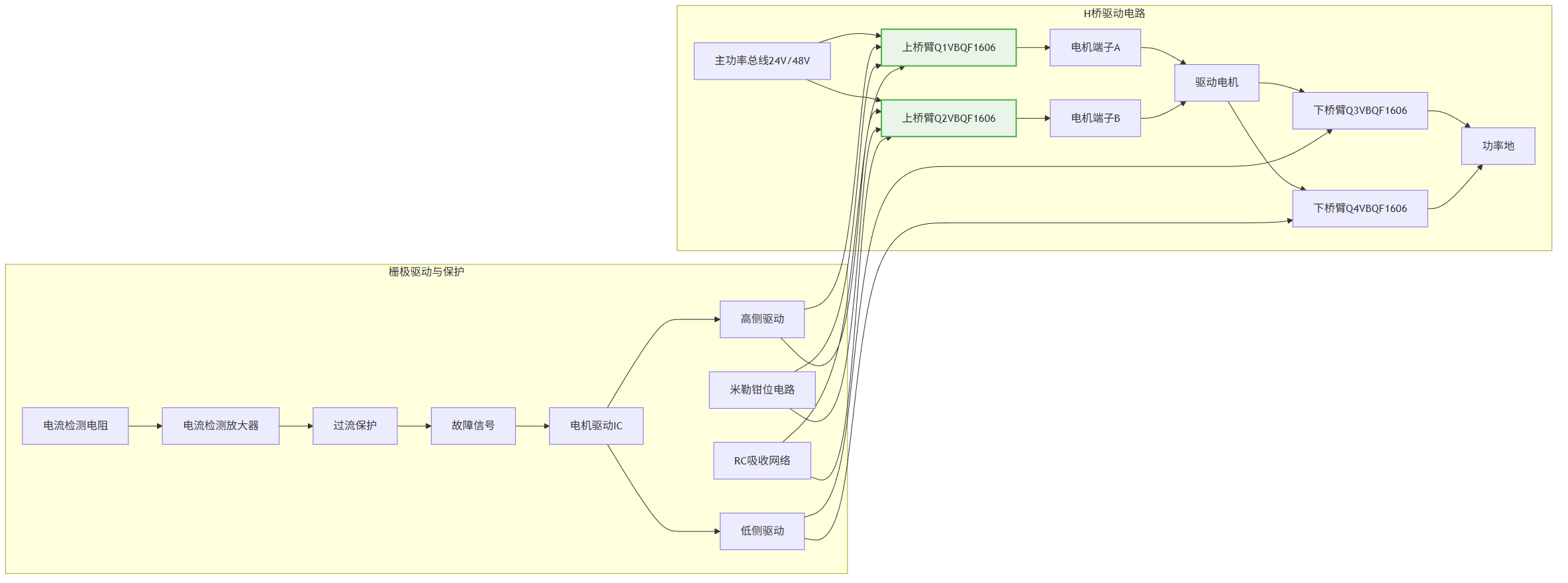
图2: AI管道检测机器人方案与适用功率器件型号分析推荐VBQF1606与VBC6N2005与VBQG1101M与产品应用拓扑图_02_motor
系统级设计与应用建议
驱动电路设计要点:
-
主电机驱动 (VBQF1606):需搭配电机驱动IC或预驱芯片,确保栅极驱动电流充足,以实现快速开关并防止上下桥臂直通。建议采用有源米勒钳位功能以增强可靠性。
-
负载路径开关 (VBC6N2005):驱动简便,MCU GPIO可通过限流电阻直接驱动,或使用小逻辑电平MOSFET进行电平转换。建议在栅极增加RC滤波以提高抗干扰能力。
-
电源转换开关 (VBQG1101M):需根据所采用的控制器类型(如峰值电流模式)精心设计栅极驱动回路,优化开关速度以平衡效率与EMI。
热管理与EMC设计:
-
分级热设计:VBQF1606必须通过大面积PCB敷铜并可能需连接至框架散热;VBC6N2005依靠局部敷铜散热即可;VBQG1101M需注意其微小封装下的热耗散,确保PCB有足够热通孔。
-
EMI抑制:在VBQF1606的功率回路布局应尽可能紧凑,以减小高频辐射。为VBQG1101M所在的开关电源添加适当的输入滤波与RC缓冲电路,以抑制传导噪声。
可靠性增强措施:
-
降额设计:电机驱动MOSFET(VBQF1606)的工作电流需根据实际工作温度(如80°C壳温)进行充分降额。
-
保护电路:为VBC6N2005控制的每路负载增设保险丝或电子保险电路。所有电机驱动回路必须包含过流保护功能。
-
静电与浪涌防护:所有MOSFET的栅极应串联电阻并就近放置对地TVS管。对于驱动感性负载(电机、云台)的开关管,漏源之间应并联续流二极管或RC吸收电路。
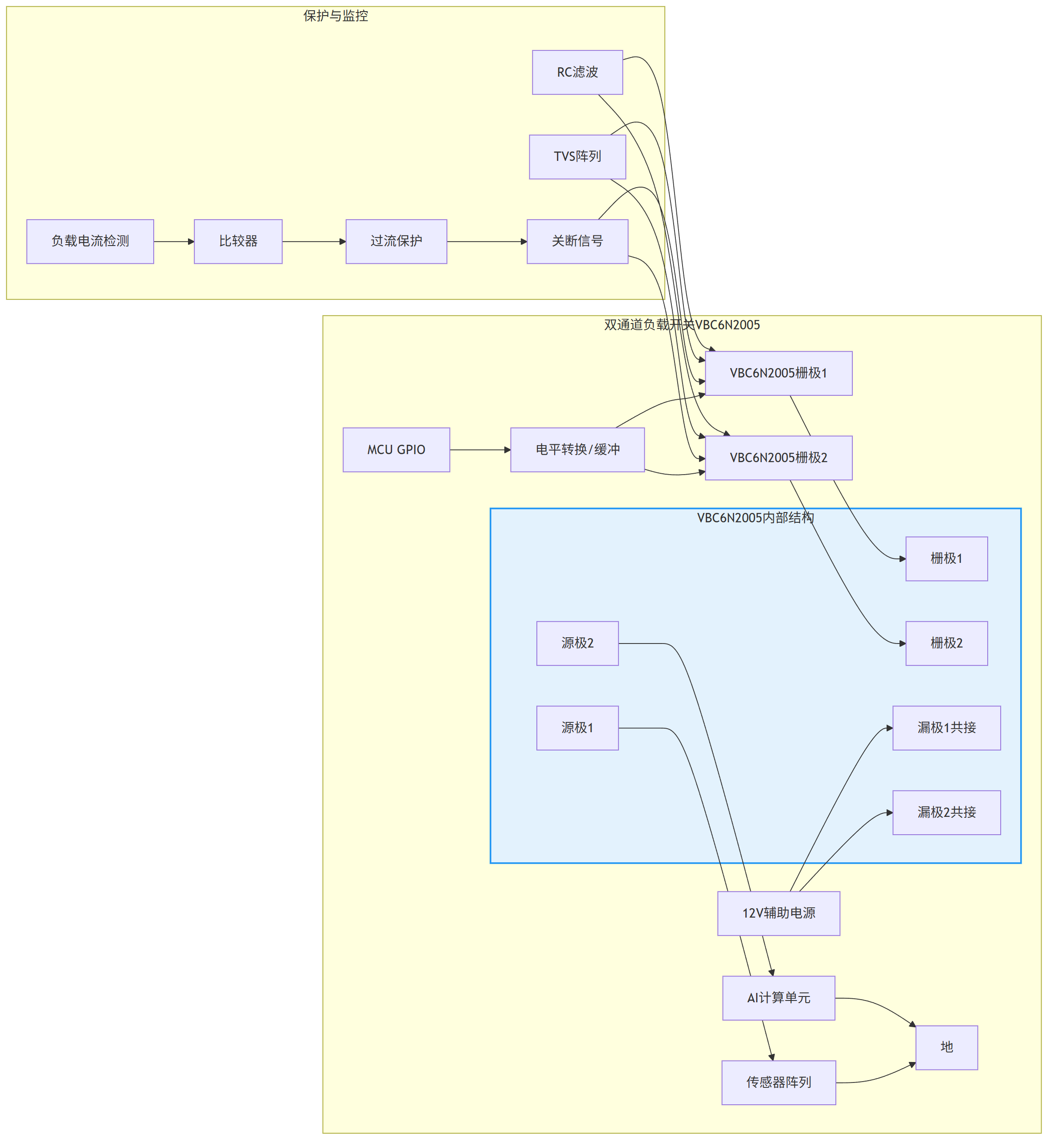
图3: AI管道检测机器人方案与适用功率器件型号分析推荐VBQF1606与VBC6N2005与VBQG1101M与产品应用拓扑图_03_load
在AI管道检测机器人的电源与驱动系统设计中,功率MOSFET的选型是实现高效、紧凑、灵活与长续航的关键。本文推荐的三级MOSFET方案体现了精准、高密度的设计理念:
核心价值体现在:
-
全链路能效与空间优化:从大电流主驱动(VBQF1606)的极低损耗,到多路负载智能分配(VBC6N2005)的精细化管理,再到辅助电源转换(VBQG1101M)的高效灵活,全方位降低功耗并节省宝贵空间,直接提升机器人的续航与小型化水平。
-
智能化电源管理:双路N-MOS实现了核心负载的独立智能通断,便于实现基于AI任务规划的动态功耗管理策略,最大化能源利用效率。
-
高可靠性保障:充足的电压/电流裕量、适应恶劣散热环境的封装设计以及针对性的保护措施,确保了机器人在狭窄、潮湿、振动的管道环境中长期稳定工作。
-
模块化与集成化:所选器件均采用先进封装,支持机器人各功能模块(驱动、控制、传感)的独立设计与高密度集成,加速开发流程。
未来趋势:
随着管道检测机器人向更自主(AI边缘计算)、更灵活(多关节仿生)、更长续航(高能量密度电池)发展,功率器件选型将呈现以下趋势:
-
对更高功率密度和更高开关频率的需求,将推动DFN、WLCSP等更小封装以及GaN/SiC器件的应用探索。
-
集成电流采样、温度监控及保护功能的智能功率开关(Intelligent Power Switch)在负载分配管理中的应用。
-
用于多电机协同驱动的多通道、高集成度半桥或全桥驱动模块的需求增长。
本推荐方案为AI管道检测机器人提供了一个从核心动力到精细电源管理的完整功率器件解决方案。工程师可根据具体的电机功率、电池电压、负载类型与空间约束进行细化调整,以打造出运动敏捷、续航持久、工作可靠的下一代管道巡检机器人。在智慧城市与工业4.0时代,卓越的硬件设计是保障地下生命线安全畅通的坚实基石。
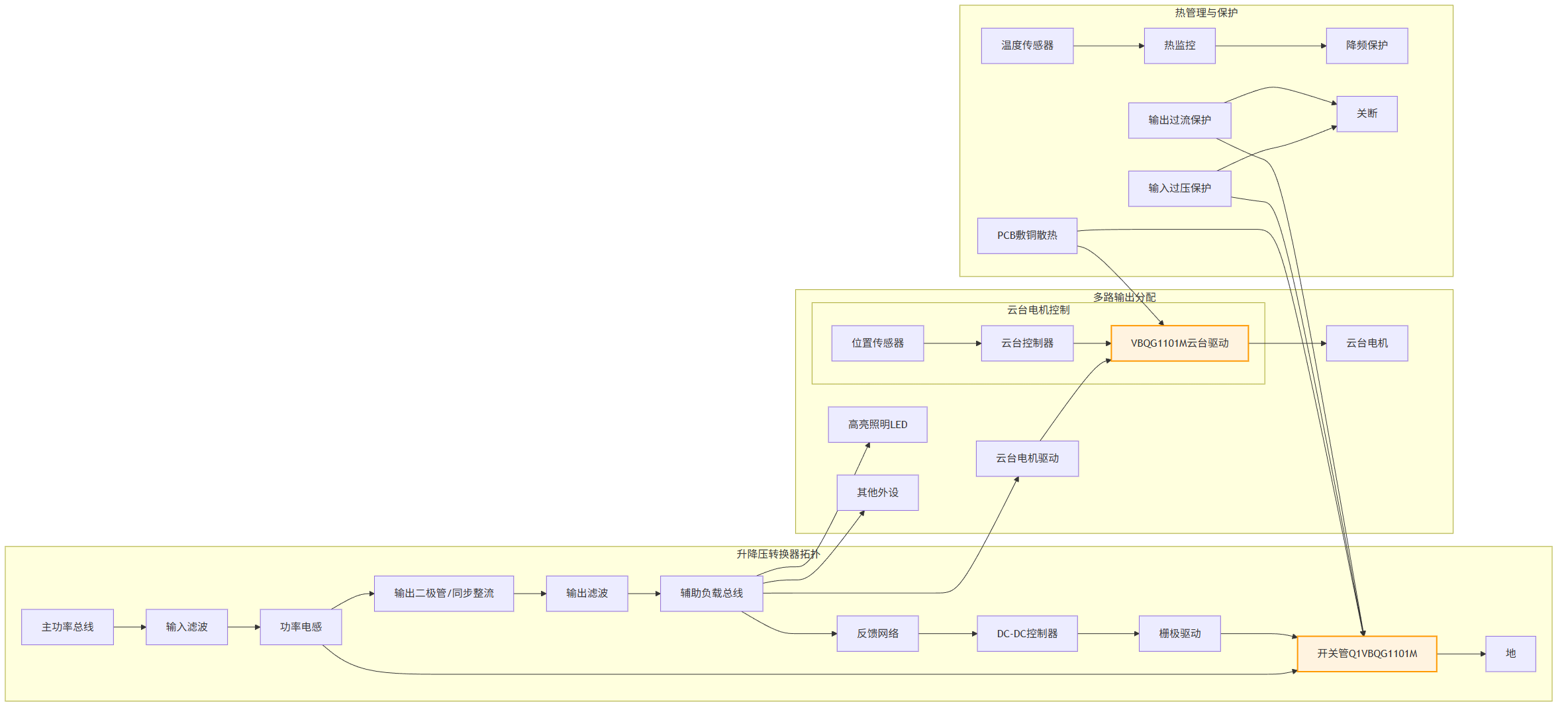
图4: AI管道检测机器人方案与适用功率器件型号分析推荐VBQF1606与VBC6N2005与VBQG1101M与产品应用拓扑图_04_power