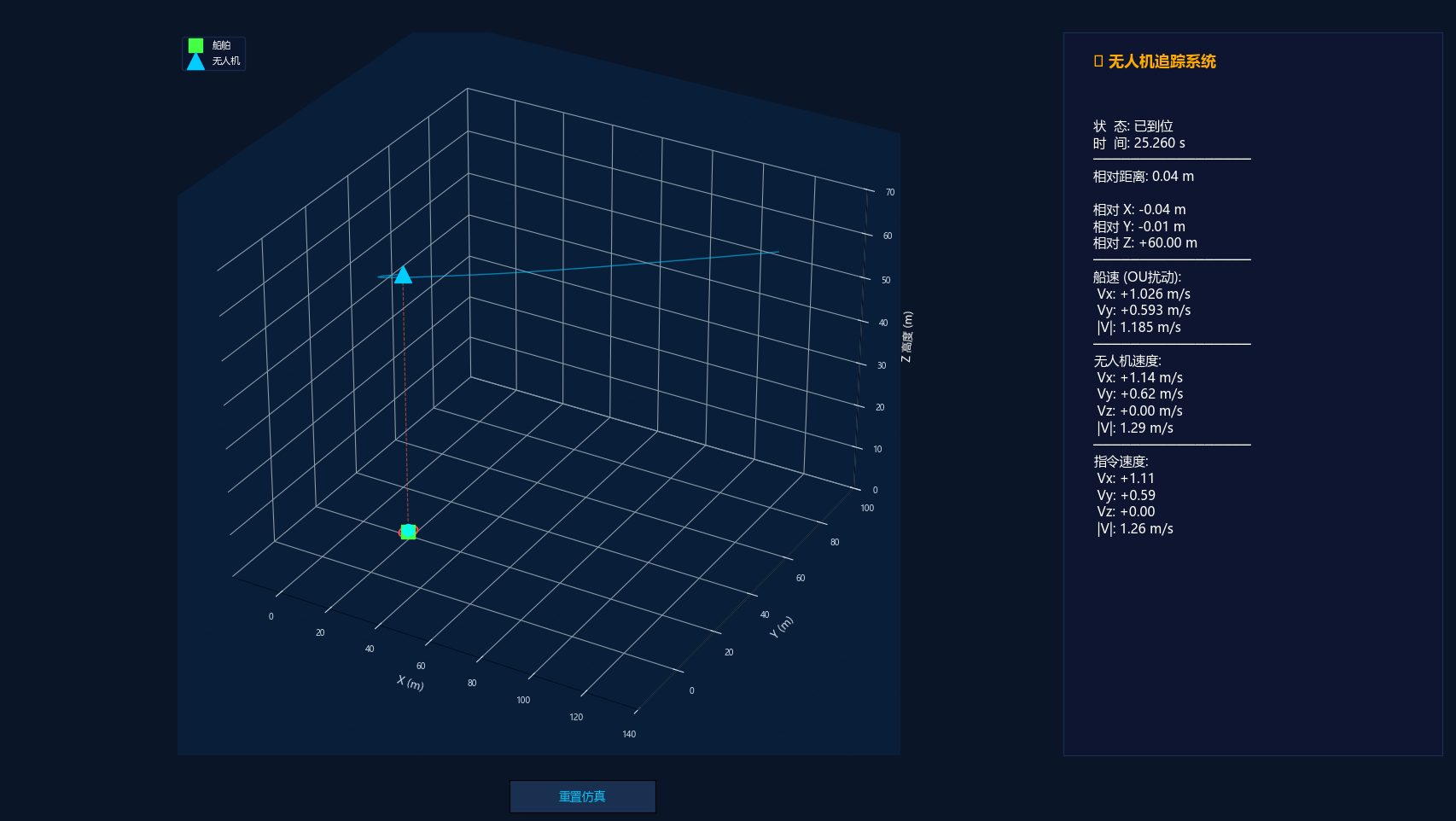
无人机自动降落到船舶上 --- 算法设计思路
目录
系统架构
整体设计思路
┌─────────────────────────────────────────────────────┐
│ 主线程 (Matplotlib 3D) │
│ 实时渲染 + 交互控制 │
└──────────────┬──────────────────────────────────────┘
│
┌──────┴──────┐
│ 状态队列 │ 命令队列
└──────┬──────┘
│
┌──────────┼──────────┐
▼ ▼ ▼
┌─────────┐┌─────────┐┌─────────┐
│ 导引线程 ││船位置线程││状态发布 │
│ (30ms) ││ (60ms) ││ (50ms) │
└─────────┘└─────────┘└─────────┘
▲ ▲
└──────┬───┘
shared_state
(Lock 保护)关键特性
| 组件 | 功能 | 周期 | 输入输出 |
|---|---|---|---|
| 导引线程 | 计算速度指令,维护无人机状态 | 30ms | 输入:无人机位置、速度;输出:速度指令 |
| 船位置线程 | 更新船的绝对位置 | 60ms | 基于船运动模型更新坐标 |
| 状态发布线程 | 快照状态供可视化 | 50ms | 读取共享状态,发布给UI |
| 可视化线程 | 3D 渲染 + 交互 | ~60Hz | 接收状态,响应用户命令 |
ZEM/ZEV 最优制导原理
目标: 使无人机在有限时间内到达船舶,同时速度降至零(零脱靶量 + 零末速度)
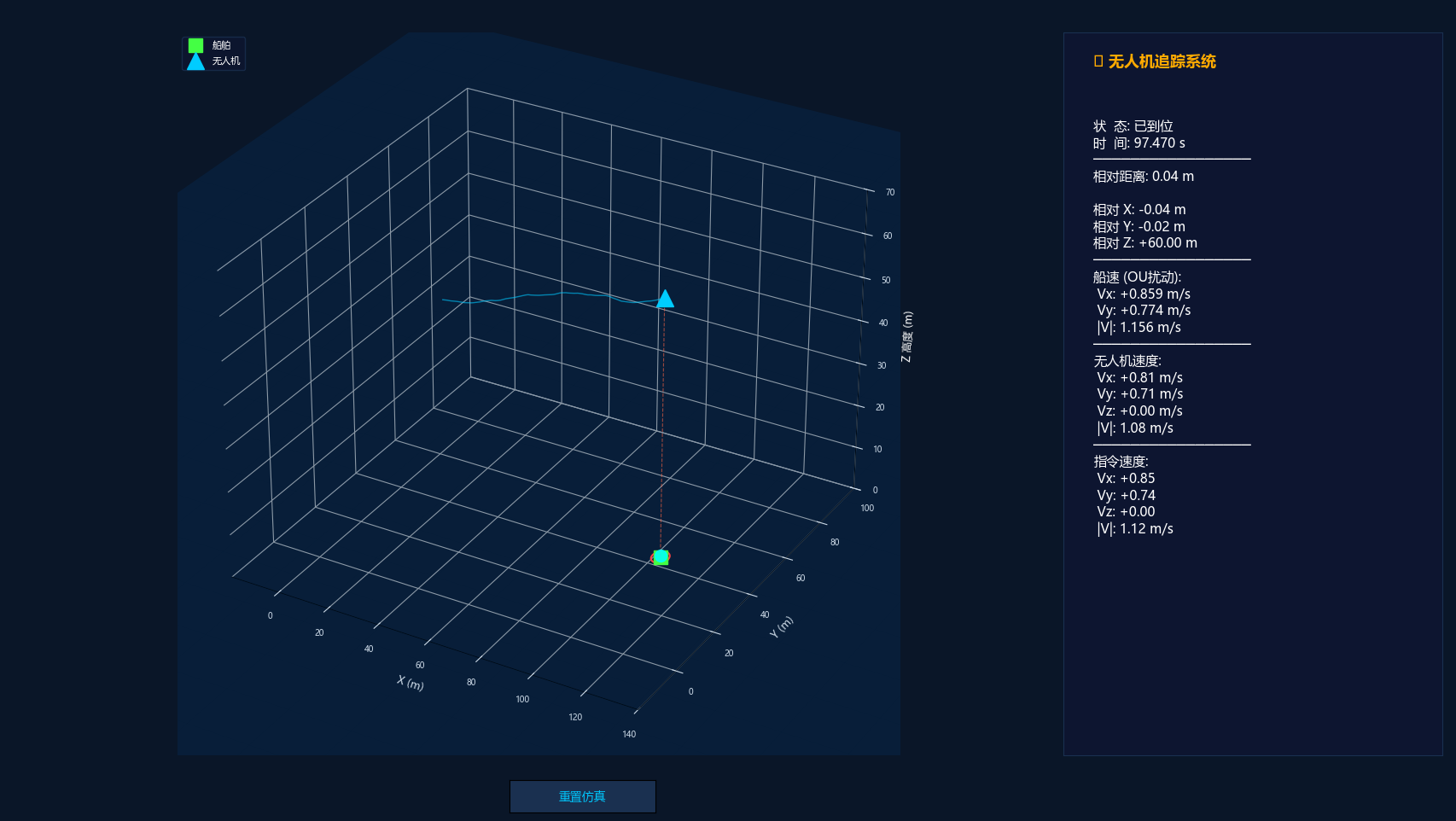
船运动模型
设计需求
模拟真实船舶运动的随机性和延迟性,包括:
- 速度波动(风浪影响)
- 航向偏转(操舵响应延迟)
- 非直线轨迹(真实感)
Ornstein-Uhlenbeck (OU) 随机过程
基本方程
d X t = − θ ( X t − μ ) d t + σ d W t d X_t = -\theta (X_t - \mu) dt + \sigma dW_t dXt=−θ(Xt−μ)dt+σdWt
特点:
- 均值回归: 波动会衰减至平均值
- 相关性: 相邻时刻相关,不是纯白噪声
- 稳态性: 长期统计性质稳定
- 物理意义: 模拟阻力、回复力等
离散化(Euler-Maruyama 格式)
X t + d t = X t − θ X t ⋅ d t + σ e f f d t ⋅ N ( 0 , 1 ) X_{t+dt} = X_t - \theta X_t \cdot dt + \sigma_{eff} \sqrt{dt} \cdot N(0, 1) Xt+dt=Xt−θXt⋅dt+σeffdt ⋅N(0,1)
其中:
σ e f f = σ 2 θ \sigma_{eff} = \sigma \sqrt{2\theta} σeff=σ2θ
速度扰动模型
目标:模拟波浪对船速的影响
参数:
| 参数 | 值 | 含义 |
|---|---|---|
SHIP_SPEED_NOMINAL |
0.583 m/s | 标称船速 |
SHIP_SPEED_FLUCTUATION |
0.15 | 波动比例(15%) |
SHIP_OU_THETA |
0.5 s⁻¹ | 均值回归率 |
SHIP_SPEED_MULTIPLIER |
2.0 | 速度倍率(可调) |
稳态特性:
- 标准差: σ = 0.583 × 0.15 ≈ 0.087 \sigma = 0.583 \times 0.15 \approx 0.087 σ=0.583×0.15≈0.087 m/s
- 相关时间: τ = 1 / θ = 2 \tau = 1 / \theta = 2 τ=1/θ=2 s
- 波动范围: ± 0.175 \pm 0.175 ±0.175 m/s(±30% 限幅)
更新方程:
python
dt = 0.06 # 60ms
sigma_eff = 0.583 * 0.15 * sqrt(2 * 0.5)
delta_v_pert += -0.5 * delta_v_pert * dt + sigma_eff * sqrt(dt) * N(0,1)
delta_v_pert = clamp(delta_v_pert, -0.175, 0.175) # ±30% 限幅航向扰动模型
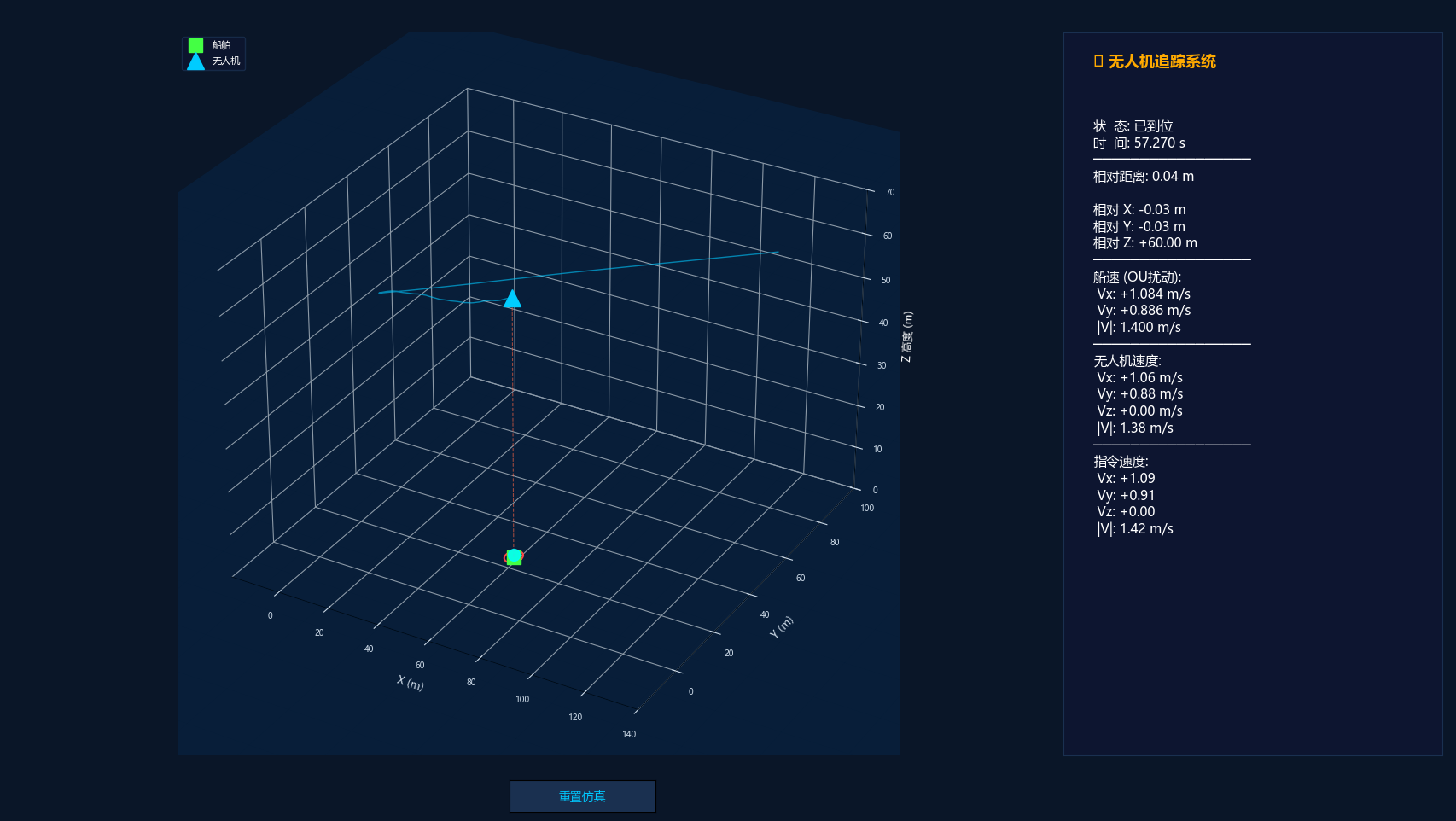
目标:模拟操舵延迟和风浪对航向的影响,产生明显弯曲的航迹
参数:
| 参数 | 值 | 含义 |
|---|---|---|
SHIP_HEADING_RAD |
31° | 标称航向 |
SHIP_HEADING_FLUCTUATION_DEG |
20° | 波动标准差 |
SHIP_HEADING_OU_THETA |
0.1 s⁻¹ | 均值回归率(低回归) |
稳态特性:
- 标准差: 20 ° 20° 20°
- 相关时间: τ = 1 / θ = 10 \tau = 1 / \theta = 10 τ=1/θ=10 s
- 波动范围: ± 45 ° \pm 45° ±45° 限幅(允许大幅偏转)
特点:
- 相比速度扰动,回归率更低(0.1 vs 0.5)
- 相关时间更长(10s vs 2s)
- 允许 ± 45 ° \pm 45° ±45° 的大幅偏转
- 结果:航迹呈现明显的弯曲和蛇形运动
更新方程:
python
sigma_h_eff = rad(20°) * sqrt(2 * 0.1)
delta_hdg_pert += -0.1 * delta_hdg_pert * dt + sigma_h_eff * sqrt(dt) * N(0,1)
delta_hdg_pert = clamp(delta_hdg_pert, -rad(45°), rad(45°))
# 计算实际船速分量
speed = (SHIP_SPEED_NOMINAL + delta_v_pert) * SHIP_SPEED_MULTIPLIER
heading = SHIP_HEADING_RAD + delta_hdg_pert
ship_vx = speed * cos(heading)
ship_vy = speed * sin(heading)航位更新
python
ship_x += ship_vx * dt
ship_y += ship_vy * dt线程协调机制
共享状态保护
所有共享变量通过 threading.Lock 保护,确保线程安全:
python
self._lock = threading.Lock()
# 受保护的共享变量
with self._lock:
self.ship_pos # 船绝对位置
self.ship_vel # 船速度
self._drone_pos # 无人机绝对位置(由外部注入)
self._drone_vel # 无人机速度(由外部注入)
self.velocity_cmd # 速度指令(导引线程写,可视化线程读)
self.trajectory # 轨迹点(导引线程写,可视化线程读)线程职责划分
导引线程 (30ms)
1. 读取命令队列(非阻塞,检查 reset 命令)
2. 接收外部注入的无人机位置和速度
3. 调用 compute_guidance() 计算速度指令
4. 更新轨迹点(deque,自动淘汰旧点)
5. 睡眠至下一周期时序特点:
- 单调钟定时:
next_wakeup += GUIDANCE_PERIOD - 消除漏斗累积(Scheduling Drift)
- 相对精准的 30ms 周期
船位置线程 (60ms)
1. 调用 update_ship() 更新船位置
2. 内部维护 OU 状态变量(速度、航向扰动)
3. 计算新的船速分量和位置
4. 睡眠至下一周期独立性:
- 不依赖导引线程,周期独立
- 只读导引线程的状态(在可视化中观察)
状态发布线程 (50ms)
1. 定期快照完整状态
2. 推送到可视化队列
3. 若队列满,丢弃旧数据(保留最新)缓冲机制:
- 使用
queue.Queue(maxsize=5)限制内存 - 满时自动丢弃最旧数据
- 避免UI卡顿
通信流
┌──────────────────────────┐
│ 导引线程 │
│ - compute_guidance() │
│ - 维护 velocity_cmd │
│ - 维护 trajectory │
└──────────┬───────────────┘
│ 共享状态
│ (Lock)
▼
┌──────────────────────────┐
│ 状态发布线程 │
│ - get_state() │
│ - 推送到队列 │
└──────────┬───────────────┘
│ 状态队列
▼
┌──────────────────────────┐
│ 可视化线程 (主线程) │
│ - 3D 渲染 │
│ - 处理用户交互 │
└──────────────────────────┘
右侧:
┌──────────────────────────┐
│ 船位置线程 │
│ - update_ship() │
│ - OU 状态维护 │
└──────────────────────────┘无阻塞操作
所有队列操作采用 get_nowait()/put_nowait() 防止死锁:
python
# 导引线程:检查命令(非阻塞)
try:
while True:
cmd = cmd_queue.get_nowait()
if cmd.get("command") == "reset":
tracker.reset()
except queue.Empty:
pass
# 可视化线程:获取最新状态(非阻塞)
def _drain_queue(self):
state = None
try:
while True:
state = self.state_queue.get_nowait()
except queue.Empty:
pass
return state自适应参数设计
周期配置的意义
| 周期 | 频率 | 目的 | 依赖关系 |
|---|---|---|---|
| 30ms | 33.3 Hz | 导引计算,轨迹采样 | 独立 |
| 60ms | 16.7 Hz | 船位置更新 | 独立 |
| 50ms | 20 Hz | 状态发布 | 依赖前两者 |
| ~60Hz | UI刷新 | 3D 渲染 | 从队列读数据 |
设计原理:
- 导引频率最高(30ms),关乎控制精度
- 船更新频率次之(60ms),足以捕捉低频运动
- 状态发布介于两者(50ms),既不过载也不漏数据
- 3D 渲染频率由 matplotlib 动画自动调节
距离判决
python
self.state = "landing" if dist < 15.0 else "tracking"- 追踪状态: 应用完整的 ZEM/ZEV 制导
- 着陆状态: 接近目标(< 15m),仅用于状态指示,实际制导无变化
轨迹记录限制
python
MAX_TRAJECTORY_POINTS = 2000
self.trajectory = collections.deque(maxlen=MAX_TRAJECTORY_POINTS)
# 时间覆盖:2000 点 × 30ms = 60s作用:
- 自动淘汰最旧的点,防止无限增长
- 覆盖完整的追踪过程(60 秒)
- O(1) 追加操作,高效
数值计算特性
无累积误差的速度积分
关键思想: 速度指令总是从外部注入的真值开始,增量为制导加速度。
python
# 不采用:v_cmd_next = v_cmd_current + a * dt ❌ 会累积舍入误差
# 而是:
v_cmd = drone_vel + a * dt ✓ 从真值开始优点:
- 仿真中无累积误差
- 在真实系统中,可直接接收 GPS/IMU 数据替代
drone_vel - 闭环反馈结构
单调时钟定时
python
next_wakeup = time.monotonic() # 基于单调钟,不受系统时间调整影响
while True:
# ... 处理业务逻辑 ...
next_wakeup += GUIDANCE_PERIOD
sleep_dur = next_wakeup - time.monotonic()
if sleep_dur > 0:
time.sleep(sleep_dur)优点:
- 消除漏斗累积(Scheduling Drift)
- 长期周期精度高
- 不受系统时钟调整影响
OU 过程的 Euler-Maruyama 离散化
python
# OU 微分方程:dX = -θ·X·dt + σ_eff·√dt·dW
X_new = X + (-θ * X * dt) + sigma_eff * sqrt(dt) * N(0, 1)数值特性:
- 一阶强收敛
- 简单稳定
- 适合实时应用
向量计算优化
所有水平面计算使用向量分量,避免频繁三角函数调用:
python
# ✓ 高效:直接使用分量
ax = -6 * rel_x / t_go2 - 4 * vrel_x / t_go
ay = -6 * rel_y / t_go2 - 4 * vrel_y / t_go
a_mag = sqrt(ax^2 + ay^2) # 仅在需要时计算模
# ❌ 低效:频繁转换极坐标
dist = sqrt(rel_x^2 + rel_y^2)
angle = atan2(rel_y, rel_x)
a_mag_cmd = 6 * dist / t_go2
# ... 再转换回分量 ...总体算法流程
完整的控制循环(30ms)
导引线程 (30ms 周期)
├─ 检查重置命令(非阻塞)
├─ 接收外部注入的无人机位置和速度
├─ compute_guidance(drone_pos, drone_vel)
│ ├─ 加速度和速度限幅
│ └─ 返回速度指令
├─ 更新轨迹(deque.append)
└─ 睡眠至下一周期
同时进行 (60ms 周期)
船位置线程 (独立)
├─ OU 速度扰动更新
├─ OU 航向扰动更新
├─ 计算实际船速和航向
└─ 航位积分
结果:
状态发布 (50ms 周期)
├─ 读取完整状态快照
└─ 推送给可视化队列
可视化 (主线程)
├─ 从队列接收状态
├─ 3D 渲染
└─ 响应用户交互(重置)可视化层反馈
用户点击 "重置" 按钮
│
├─ 清空 UI 轨迹缓存
├─ 推送 reset 命令到命令队列
│
导引线程 检测到命令
│
├─ 调用 tracker.reset()
│ ├─ 清空所有状态
│ ├─ 从初始位置重新开始
│ └─ 重初始化 OU 状态
│
仿真重新启动
└─ 轨迹从初始位置开始绘制扩展与改进方向
现有设计的可扩展性
- 传感器融合: 用 GPS/IMU 传感器读数直接替代
drone_vel和drone_pos注入 - 风场模型: 船速扰动可演变为风场模型
- 多目标跟踪: 轻易扩展到多个船舶和无人机
- 动态轨迹规划: 每次调用自动重规划,支持动态约束
参数调优建议
| 参数 | 调优方向 | 效果 |
|---|---|---|
MAX_ACCEL |
增大 | 更快追踪,更大加速度尖峰 |
MAX_SPEED |
增大 | 更快速度,更易超调 |
T_GO_MIN |
减小 | 允许更激进的制导,风险增大 |
SHIP_SPEED_MULTIPLIER |
增大 | 船更快,追踪难度增大 |
SHIP_HEADING_OU_THETA |
减小 | 航向波动更持久,轨迹更弯曲 |