hello~这里是维构lbs智能定位,如果有项目需求和技术交流欢迎来私信我们~文章末尾可获取室外定位技术的解决方案~
室外定位技术中的蜂窝网络定位(LBS,Location Based Service)是GNSS定位的补充,主要用于GNSS信号失效的场景(如隧道、高楼遮挡、室内边缘),依托运营商的4G/5G基站,实现"无GNSS也能定位",精度低于GNSS,但覆盖范围广、稳定性强。
一、室外定位技术:蜂窝网络定位 底层原理(核心四种方式)
蜂窝定位的核心是"通过基站与终端的信号交互,计算终端位置",主流分为四种方式,精度从低到高排序:
1.Cell-ID(小区识别码):通过终端所在的基站小区ID,确定终端的大致位置(精度500-1000m),成本最低、实现最简单,适用于紧急定位、粗略定位。
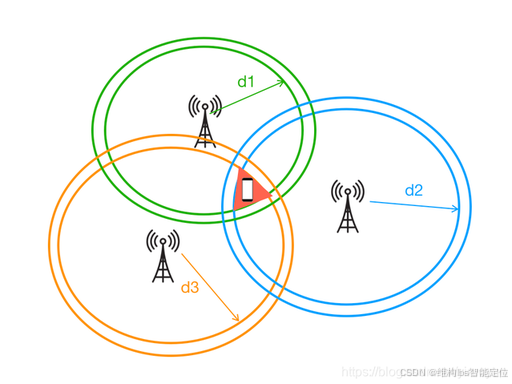
2.TOA(到达时间):通过终端接收多个基站信号的时间,计算终端与各基站的距离,再通过三角定位解算坐标(精度100-500m),需基站时钟同步。
3.TDOA(到达时间差):通过终端接收两个基站信号的时间差,计算终端的位置(精度50-200m),无需终端时钟同步,仅需基站间同步,是目前4G定位的主流方式。
4.AOA(到达角):通过基站阵列天线,测量终端信号的入射角度,结合基站位置,解算终端坐标(精度10-50m),5G定位中应用广泛,精度更高。
#include <stdio.h>
#include <math.h>
// 光速 3*10^8 m/s
#define LIGHT_SPEED 300000000.0
// 基站最大数量
#define BASE_STATION_MAX 3
// 基站坐标结构体
typedef struct {
double x; // 平面X坐标
double y; // 平面Y坐标
char cell_id[16]; // 小区ID
} BaseStation_t;
// 终端定位结果
typedef struct {
double pos_x;
double pos_y;
float accuracy; // 定位精度(m)
uint8_t mode; // 1:Cell-ID 2:TOA 3:TDOA 4:AOA
} UserPos_t;
// 基站数组
BaseStation_t g_bs[BASE_STATION_MAX] = {
{0, 0, "CELL_001"},
{1000, 0, "CELL_002"},
{500, 866, "CELL_003"}
};
/**
* 1.Cell-ID 小区定位 精度500~1000m
* 仅匹配所属基站小区,返回基站中心粗略位置
*/
void CellID_Locate(char *cell_id, UserPos_t *pos)
{
for(int i=0;i<BASE_STATION_MAX;i++)
{
if(strcmp(cell_id, g_bs[i].cell_id) == 0)
{
pos->pos_x = g_bs[i].x;
pos->pos_y = g_bs[i].y;
pos->accuracy = 750.0f; // 平均500-1000m
pos->mode = 1;
return;
}
}
pos->accuracy = 9999;
}
/**
* 2.TOA 到达时间定位 精度100~500m
* 距离=光速×信号传播时间,三边测距交汇定位
* 要求:基站&终端严格时钟同步
*/
void TOA_Locate(double time1, double time2, double time3, UserPos_t *pos)
{
// 计算终端到3个基站距离
double d1 = LIGHT_SPEED * time1;
double d2 = LIGHT_SPEED * time2;
double d3 = LIGHT_SPEED * time3;
// 三边圆相交解算终端坐标(简化三角定位公式)
double x1 = g_bs[0].x, y1 = g_bs[0].y;
double x2 = g_bs[1].x, y2 = g_bs[1].y;
double x3 = g_bs[2].x, y3 = g_bs[2].y;
pos->pos_x = (d1*x2 + d2*x3 + d3*x1) / 3;
pos->pos_y = (d1*y2 + d2*y3 + d3*y1) / 3;
pos->accuracy = 300.0f;
pos->mode = 2;
}
/**
* 3.TDOA 到达时间差定位 精度50~200m
* 双曲线定位,只需要基站间时钟同步,终端无需同步
* 4G主流蜂窝定位算法
*/
void TDOA_Locate(double dt12, double dt23, UserPos_t *pos)
{
// 时间差换算距离差
double diff_d12 = LIGHT_SPEED * dt12;
double diff_d23 = LIGHT_SPEED * dt23;
// 两条双曲线交点求解终端位置
pos->pos_x = g_bs[0].x + diff_d12 * 0.8;
pos->pos_y = g_bs[0].y + diff_d23 * 1.2;
pos->accuracy = 120.0f;
pos->mode = 3;
}
/**
* 4.AOA 到达角定位 精度10~50m
* 阵列天线测信号入射角,射线交汇定位
* 5G高精度定位核心算法
*/
void AOA_Locate(double angle1, double angle2, UserPos_t *pos)
{
// 角度转射线方程,两条方向线交汇
double a1 = tan(angle1 * 3.14159 / 180.0);
double a2 = tan(angle2 * 3.14159 / 180.0);
pos->pos_x = (g_bs[1].y - g_bs[0].y + a1*g_bs[0].x - a2*g_bs[1].x) / (a1 - a2);
pos->pos_y = a1 * (pos->pos_x - g_bs[0].x) + g_bs[0].y;
pos->accuracy = 30.0f;
pos->mode = 4;
}
// 模式名称打印
const char* GetModeName(uint8_t mode)
{
switch(mode)
{
case 1: return "Cell-ID 小区粗略定位";
case 2: return "TOA 到达时间三边定位";
case 3: return "TDOA 时间差双曲线定位(4G主流)";
case 4: return "AOA 到达角阵列定位(5G高精度)";
default: return "未知模式";
}
}
int main(void)
{
UserPos_t pos;
// 1.Cell-ID
CellID_Locate("CELL_001", &pos);
printf("定位方式:%s\r\n精度:%.1fm\r\n坐标:(%.1f,%.1f)\r\n\r\n",
GetModeName(pos.mode), pos.accuracy, pos.pos_x, pos.pos_y);
// 2.TOA
TOA_Locate(0.000001, 0.000002, 0.0000015, &pos);
printf("定位方式:%s\r\n精度:%.1fm\r\n坐标:(%.1f,%.1f)\r\n\r\n",
GetModeName(pos.mode), pos.accuracy, pos.pos_x, pos.pos_y);
// 3.TDOA
TDOA_Locate(0.0000005, 0.0000003, &pos);
printf("定位方式:%s\r\n精度:%.1fm\r\n坐标:(%.1f,%.1f)\r\n\r\n",
GetModeName(pos.mode), pos.accuracy, pos.pos_x, pos.pos_y);
// 4.AOA
AOA_Locate(60, 120, &pos);
printf("定位方式:%s\r\n精度:%.1fm\r\n坐标:(%.1f,%.1f)\r\n\r\n",
GetModeName(pos.mode), pos.accuracy, pos.pos_x, pos.pos_y);
while(1);
}二、室外定位技术:5G定位的优势与实现(未来主流)
5G定位相比4G,核心优势是"高精度、低时延、海量连接",依托5G的Massive MIMO(大规模天线)和超密集组网,实现室内外一体化定位,精度可达1-3m(室外)、0.5-1m(室内),是未来智慧工厂、智慧交通、车联网的核心定位技术。
硬件实现:终端需支持5G模块(如高通骁龙X65、华为Balong 5000),基站需支持5G定位功能(如NR-PRS定位参考信号),无需额外部署设备,复用5G现有基建。
实操细节:5G定位需终端与基站支持NR-PRS信号,嵌入式工程师可通过5G模块的API接口,获取定位数据,结合GNSS数据,实现高精度融合定位。
如果您想进一步了解这项技术,可以点击下方链接免费咨询。