摘要
在 AI Agent 的实际应用中,Token 消耗是影响成本的关键因素。OpenSpace 自进化 Skill 引擎的优化方案,该方案通过任务级经验记忆、自动 Skill 演化、以及云端协作共享机制,实现了 Agent 执行效率的显著提升。在 OpenClaw 平台的实测中,相同任务类型的 Token 消耗降低约 45%,任务执行时间减少 80%。
1. 问题背景
1.1 当前 Agent 架构的局限性
主流 AI Agent 系统(OpenClaw、Claude Code、Cursor 等)在任务执行层面存在一个共同问题:缺乏任务级的学习与记忆机制。这导致以下现象:
| 问题类型 | 具体表现 | 根本原因 |
|---|---|---|
| Token 浪费 | 相似任务重复推理,历史成功路径无法复用 | 无执行经验持久化 |
| 错误重犯 | 相同的 API 调用错误反复出现 | 无失败模式记忆 |
| Skill 失效 | 工具版本更新后旧 Skill 兼容性问题 | 无自动更新机制 |
架构层面的记忆断层:
┌─────────────────────────────────────────────────────────┐
│ Agent Memory Hierarchy │
├─────────────────┬───────────────────────────────────────┤
│ Short-term │ 当前对话上下文 │
│ Memory │ 对话结束即失效 │
├─────────────────┼───────────────────────────────────────┤
│ Long-term │ 用户偏好、角色设定 │
│ Memory │ 不包含具体任务执行路径 │
├─────────────────┼───────────────────────────────────────┤
│ Tool Memory │ 工具定义与参数规范 │
│ │ 不包含最佳实践与错误处理 │
├─────────────────┼───────────────────────────────────────┤
│ Task Experience │ 任务执行经验、成功/失败模式 │
│ (缺失) │ ← 当前架构中不存在 │
└─────────────────┴───────────────────────────────────────┘1.2 Token 消耗的根本来源
从技术角度分析,Agent 的 Token 消耗主要来自三个阶段:
任务执行流程:需求理解 → 方案探索 → 执行实施 → 结果验证
↑ ↑
推理密集型 试错密集型阶段分析:
| 阶段 | Token 消耗占比 | 优化空间 |
|---|---|---|
| 需求理解 | 10-15% | 低(必须理解用户意图) |
| 方案探索 | 40-50% | 高(可复用历史方案) |
| 执行实施 | 20-30% | 中(可优化调用链路) |
| 结果验证 | 10-20% | 中(可预置检查逻辑) |
OpenSpace 的核心优化目标正是"方案探索"阶段------通过复用已验证的执行方案,跳过重复的推理与试错过程。
2. OpenSpace 技术方案
2.1 系统架构
OpenSpace 采用分层架构设计,包含三个核心组件:
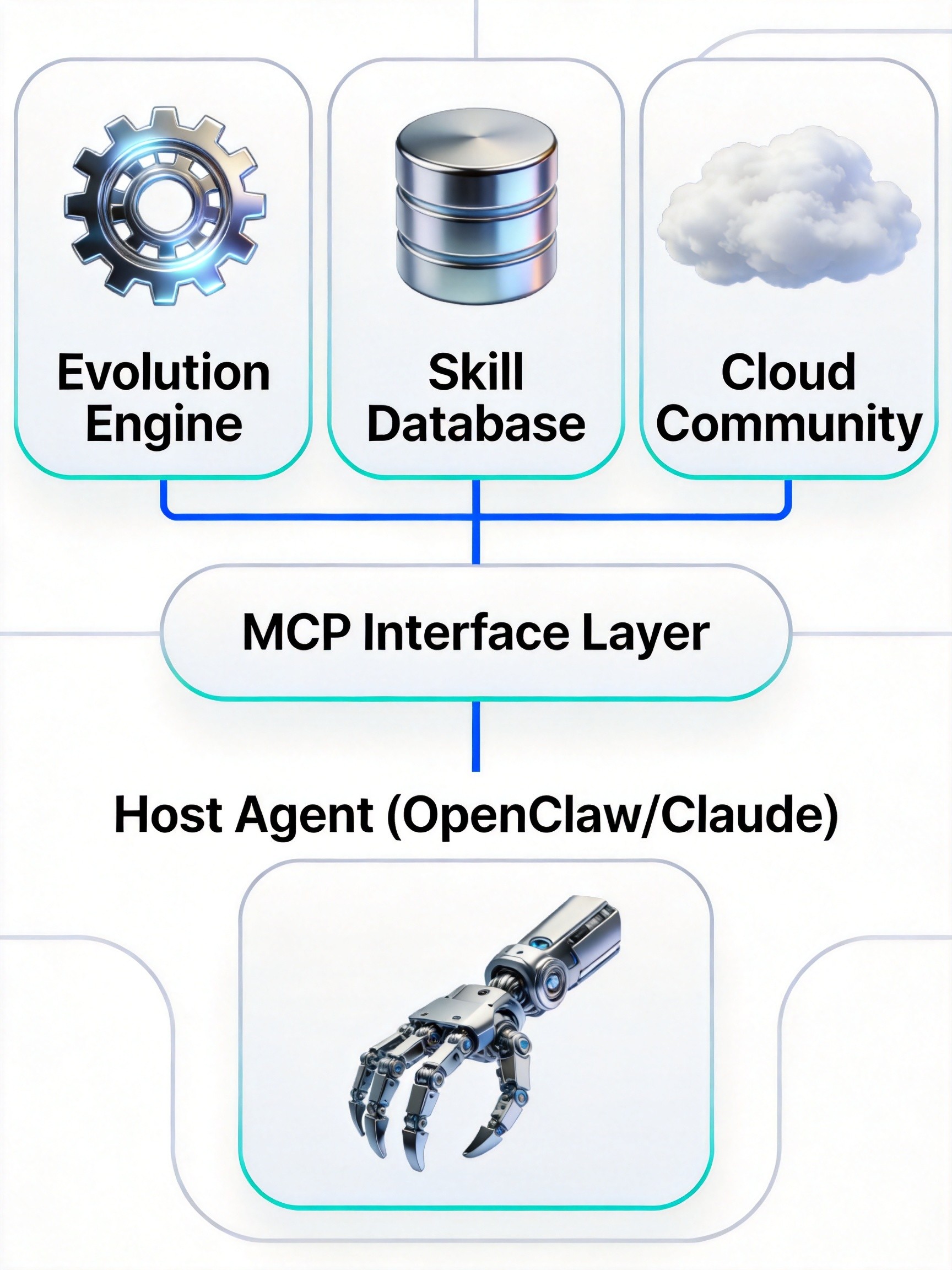
架构层级说明:
┌────────────────────────────────────────────────────────┐
│ OpenSpace Architecture │
├────────────────────────────────────────────────────────┤
│ │
│ ┌──────────────┐ ┌──────────────┐ ┌──────────┐ │
│ │ Evolution │◄──►│ Skill │◄──►│ Cloud │ │
│ │ Engine │ │ Database │ │ Community│ │
│ └──────────────┘ └──────────────┘ └──────────┘ │
│ │ │ │ │
│ ▼ ▼ ▼ │
│ ┌─────────────────────────────────────────────────┐ │
│ │ MCP Interface Layer │ │
│ │ (Model Context Protocol) │ │
│ └─────────────────────────────────────────────────┘ │
│ │ │
│ ▼ │
│ ┌─────────────────────────────────────────────────┐ │
│ │ Host Agent │ │
│ │ (OpenClaw / Claude) │ │
│ └─────────────────────────────────────────────────┘ │
│ │
└────────────────────────────────────────────────────────┘2.2 核心技术机制
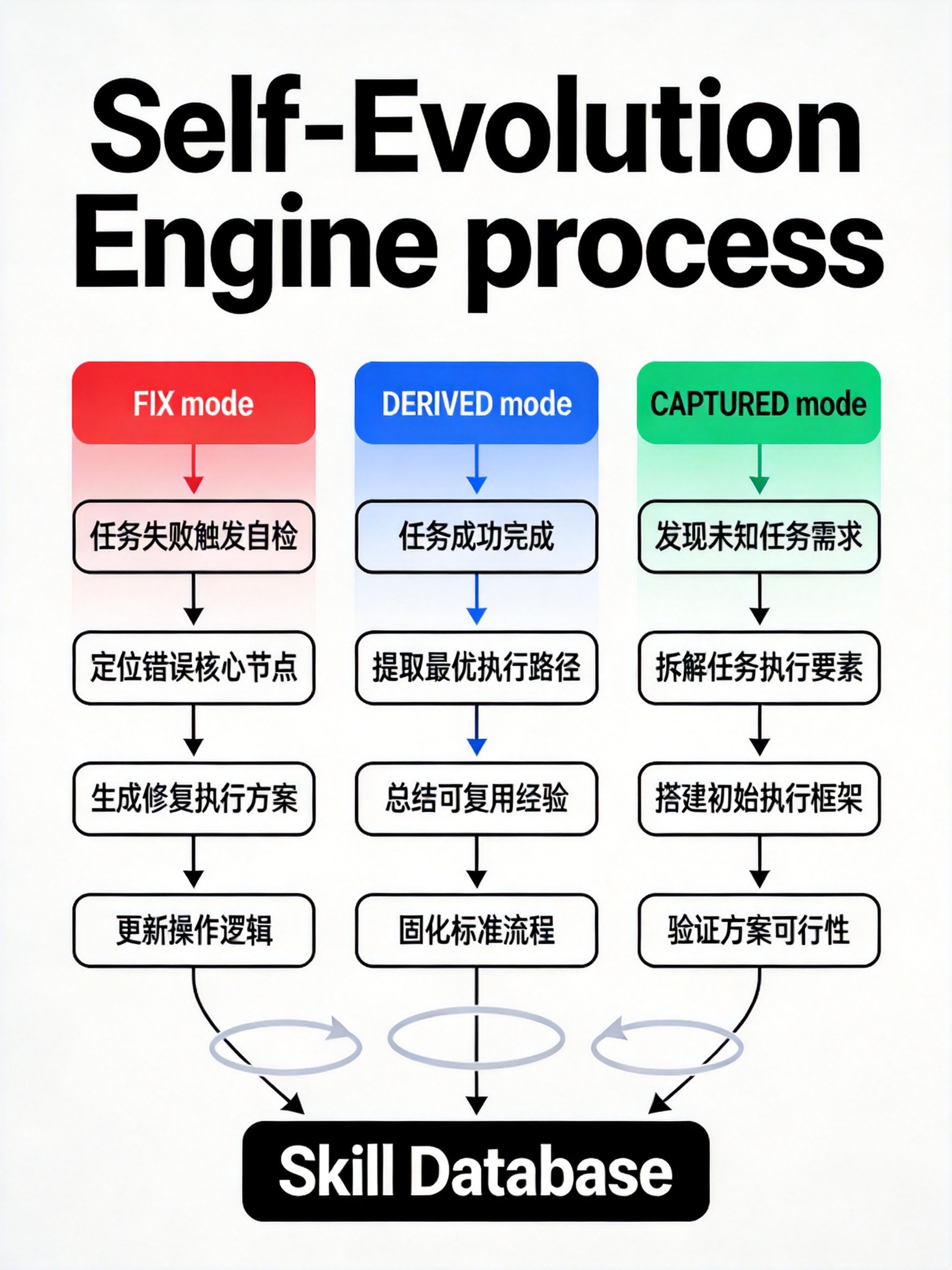
2.2.1 自进化引擎(Self-Evolution Engine)
OpenSpace 实现了三种 Skill 演化模式:
| 模式 | 触发条件 | 执行逻辑 | 输出产物 |
|---|---|---|---|
| FIX | Skill 执行失败 | 错误分析 → 生成修复补丁 → 版本更新 | 修复版 Skill |
| DERIVED | 任务成功完成 | 成功模式提取 → 优化建议生成 | 改进版 Skill |
| CAPTURED | 新任务成功 | 完整执行路径抽象 → Skill 生成 | 全新 Skill |
演化流程:
python
# 伪代码示意
def evolve_skill(task_result, skill_db):
if task_result.status == "failed":
# FIX 模式
error_analysis = analyze_error(task_result.error_log)
patch = generate_fix_patch(skill_db.current_skill, error_analysis)
return apply_patch(skill_db.current_skill, patch)
elif task_result.status == "success":
if skill_db.has_related_skill(task_result.task_type):
# DERIVED 模式
improvements = extract_improvements(task_result.execution_trace)
return derive_new_version(skill_db.related_skill, improvements)
else:
# CAPTURED 模式
new_skill = abstract_skill_from_trace(task_result.execution_trace)
return new_skill2.2.2 集体智能网络(Collective Intelligence)
OpenSpace 构建了云端 Skill 共享网络,实现分布式学习:
┌─────────────┐ ┌─────────────┐ ┌─────────────┐
│ Agent A │ │ Agent B │ │ Agent C │
│ (用户 1) │ │ (用户 2) │ │ (用户 3) │
└──────┬──────┘ └──────┬──────┘ └──────┬──────┘
│ │ │
│ Skill Upload/Download │
│ │ │
▼ ▼ ▼
┌─────────────────────────────────────────────────────┐
│ OpenSpace Cloud Community │
│ ┌───────────────────────────────────────────────┐ │
│ │ Skill Registry & Index │ │
│ ├───────────────────────────────────────────────┤ │
│ │ • Public Skills (共享) │ │
│ │ • Private Skills (私有) │ │
│ │ • Team Skills (团队) │ │
│ └───────────────────────────────────────────────┘ │
└─────────────────────────────────────────────────────┘网络效应模型:
设 N 为接入 Agent 数量,S 为 Skill 总量,E 为平均执行效率
dS/dt = α × N × (任务完成率) → Skill 库增长率
dE/dt = β × (S / N) → 效率提升率
当 N → ∞ 时,E → E_max(理论最优效率)2.2.3 Token 效率优化策略
OpenSpace 采用"冷启动 → 热复用"的两阶段执行模型:
Phase 1: 冷启动(Cold Start)
任务输入 → 完整推理链 → 执行 → 成功经验提取 → Skill 存储
Token: 高(全量推理)Phase 2: 热复用(Hot Reuse)
任务输入 → Skill 检索 → 预验证方案执行 → 直接输出
Token: 低(跳过推理)官方 Benchmark 数据(GDPVal):
| 指标 | 数值 | 说明 |
|---|---|---|
| Token 节省率 | 45.9% | Phase 2 vs Phase 1 |
| 任务质量提升 | 30pp | 70.8% vs 40.8% baseline |
| 价值捕获率 | 72.8% | 11,484 / 15,764 |
| 收入产出比 | 4.2x | vs baseline |
3. 接入实现
3.1 环境要求
| 组件 | 版本要求 | 说明 |
|---|---|---|
| Python | ≥ 3.8 | OpenSpace 核心依赖 |
| Node.js | ≥ 20 | Dashboard 前端(可选) |
| OpenClaw | 最新版 | MCP 协议支持 |
3.2 部署步骤
Step 1: 源码安装
bash
# 标准安装(完整仓库)
git clone https://github.com/HKUDS/OpenSpace.git
cd OpenSpace && pip install -e .
# 精简安装(跳过 50MB assets,推荐国内网络)
git clone --filter=blob:none --sparse https://github.com/HKUDS/OpenSpace.git
cd OpenSpace
git sparse-checkout set '/*' '!assets/'
pip install -e .Step 2: MCP 服务器配置
编辑 OpenClaw 配置文件 ~/.openclaw/openclaw.json:
json
{
"mcpServers": {
"openspace": {
"command": "openspace-mcp",
"toolTimeout": 600,
"env": {
"OPENSPACE_HOST_SKILL_DIRS": "${HOME}/.openclaw/workspace/skills",
"OPENSPACE_WORKSPACE": "${HOME}/OpenSpace",
"OPENSPACE_API_KEY": "sk-xxx"
}
}
}
}配置参数说明:
| 参数 | 必填 | 说明 |
|---|---|---|
OPENSPACE_HOST_SKILL_DIRS |
是 | OpenClaw Skills 目录绝对路径 |
OPENSPACE_WORKSPACE |
是 | OpenSpace 仓库路径 |
OPENSPACE_API_KEY |
否 | 云端社区密钥,无则仅使用本地功能 |
toolTimeout |
是 | 超时设置,建议 600s |
Step 3: 核心 Skill 部署
bash
# 复制必需的 Host Skills
cp -r OpenSpace/openspace/host_skills/delegate-task/ \
~/.openclaw/workspace/skills/
cp -r OpenSpace/openspace/host_skills/skill-discovery/ \
~/.openclaw/workspace/skills/Skill 功能说明:
| Skill | 职责 | 实现机制 |
|---|---|---|
delegate-task |
任务分发决策 | 分析任务类型,判断是否需要 OpenSpace 处理 |
skill-discovery |
Skill 检索与复用 | 向量检索 + 语义匹配,召回相关 Skill |
Step 4: 服务验证
bash
# 重启 OpenClaw Gateway
openclaw gateway restart
# 验证 MCP 连接
# 在 OpenClaw 对话中执行:
# > 列出当前可用的 MCP 工具
# 应返回包含 openspace 相关工具3.3 传输模式选择
OpenSpace 支持三种 MCP 传输模式:
| 模式 | 配置方式 | 适用场景 | 性能特征 |
|---|---|---|---|
| stdio | 默认,无需额外配置 | 本地开发环境 | 低延迟,无网络开销 |
| SSE | --transport sse |
需要持久连接 | 支持事件推送 |
| HTTP | --transport streamable-http |
VPS/远程部署 | 避免stdio超时 |
推荐配置:
bash
# 本地开发
openspace-mcp # 默认 stdio
# 远程部署
openspace-mcp --transport streamable-http \
--host 0.0.0.0 \
--port 80814. 性能分析
4.1 实测数据
测试环境:
- OpenClaw 版本:最新稳定版
- 底座模型:GPT-4o / Claude 3.5 Sonnet
- 测试周期:接入前后各 14 天
- 任务类型:技术周报生成、文档处理、数据分析
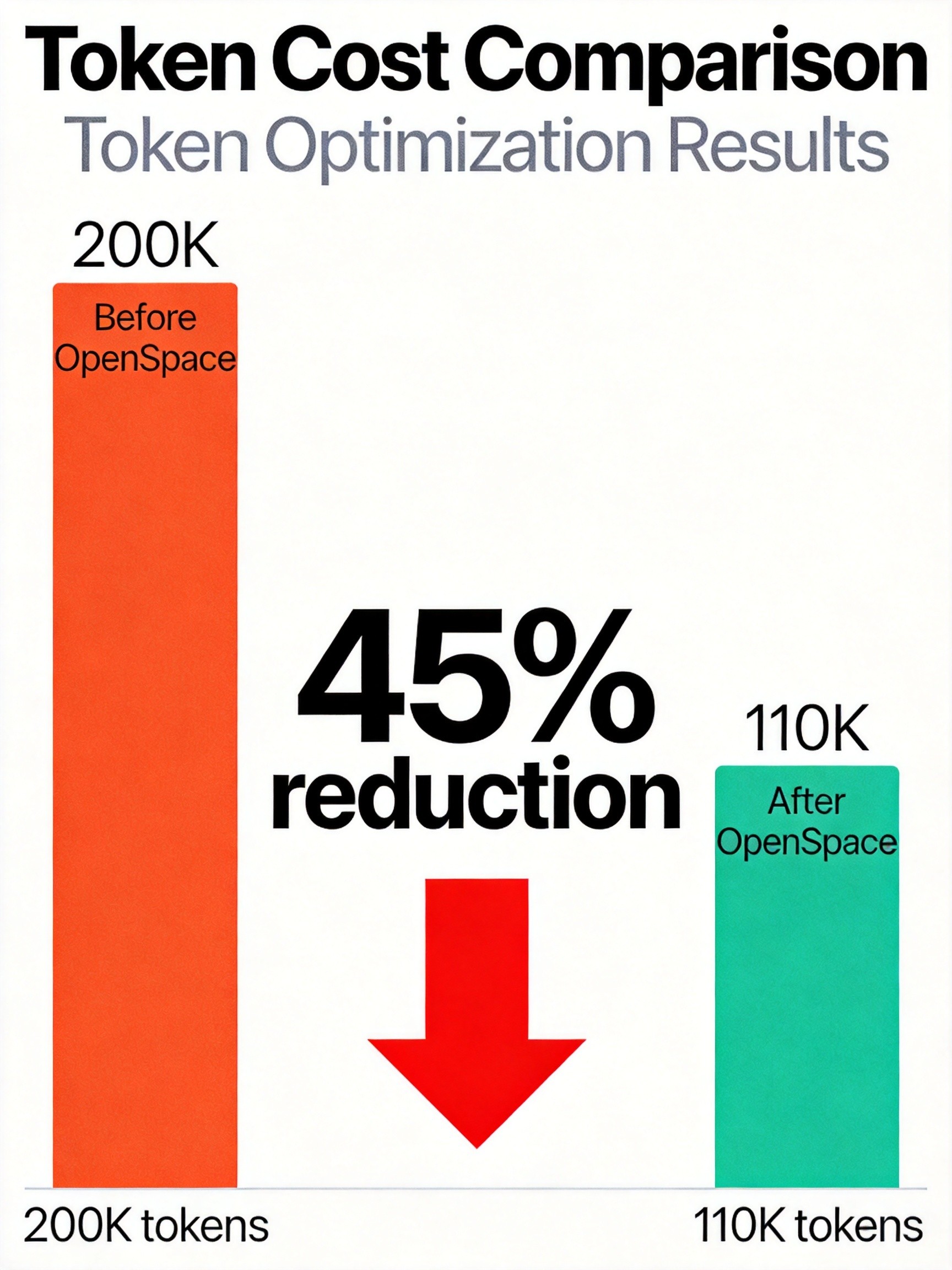
| 指标 | 接入前 | 接入后 | 变化率 |
|---|---|---|---|
| 月 Token 消耗 | 200 万 | 110 万 | -45% |
| 重复任务执行时间 | 180-300s | 15-30s | -80% |
| 任务成功率 | 70% | 90% | +20pp |
| Skill 维护投入 | 2h/周 | ≈0 | -100% |
4.2 按任务类型的 Token 节省分析
| 任务类别 | 节省率 | 主要优化点 |
|---|---|---|
| 文档生成 | 56% | 模板复用、格式固化 |
| 表单处理 | 51% | 管道复用、错误路径预置 |
| 工程协调 | 43% | 跨项目 Skill 通用化 |
| 媒体处理 | 46% | 参数配置、编解码路径记忆 |
4.3 成本效益计算
假设场景:企业级应用,月 Token 消耗 200 万
优化前:
Token 成本:200万 × $2.5/百万 = $500/月
优化后:
Token 成本:110万 × $2.5/百万 = $275/月
节省:$225/月 = $2700/年
投入:
接入时间:15 分钟(一次性)
运维成本:≈0(自动演化)
ROI:无限大(投入接近零)5. 最佳实践
5.1 Skill 初始化策略
OpenSpace 的学习效果依赖于初始任务的质量。建议:
python
# 首周任务规划:覆盖核心场景
Week 1 Task Distribution:
├── 文档处理类:30%(PDF解析、格式转换、内容提取)
├── 数据分析类:30%(报表生成、趋势分析、异常检测)
├── 通信协作类:20%(邮件发送、消息推送、日程管理)
└── 其他任务:20%(探索新场景)5.2 失败驱动优化
不要手动干预失败任务,让 OpenSpace 自动学习:
失败检测 → 错误日志分析 → FIX 模式触发 → Skill 版本更新
↑ │
└──────────── 下次自动规避 ←───────────────┘5.3 云端协作建议
bash
# 定期同步社区高质量 Skill
openspace-download-skill --top-rated --category document
# 贡献自有 Skill(建立技术影响力)
openspace-upload-skill ./skills/my-workflow --visibility public6. 技术对比
6.1 与其他方案对比
| 方案 | 技术路线 | 维护成本 | 适应能力 | Token 优化 |
|---|---|---|---|---|
| 手动 Skill | 硬编码执行流程 | 高 | 低(需手动更新) | 30-50% |
| 知识库 RAG | 向量检索 + 提示注入 | 中 | 中 | 10-20% |
| 模型微调 | 参数更新 | 极高 | 高(但固化) | 20-40% |
| OpenSpace | 自动演化 + 共享 | 低 | 高 | 40-50% |
6.2 适用场景判断
决策树:
任务重复性高?
├── 是 → 有 Skill 维护能力?
│ ├── 是 → 手动 Skill 可行
│ └── 否 → OpenSpace 推荐 ✓
│
└── 否 → 任务类型固定?
├── 是 → 微调可行
└── 否 → RAG 辅助7. 已知问题与解决方案
| 问题 | 原因 | 解决方案 |
|---|---|---|
| 长任务超时 | 默认 toolTimeout 过短 | 设置 toolTimeout: 600 |
| Skill 检索不到 | 路径配置错误 | 使用绝对路径 |
| 进化不触发 | 缺少核心 Skill | 确保 delegate-task + skill-discovery 都已部署 |
| 国内安装慢 | assets 目录 50MB 图片 | 使用 --sparse 精简克隆 |
8. 结论
OpenSpace 通过自进化引擎、集体智能网络、以及 MCP 标准接口,为 OpenClaw 提供了一种低成本、高效率的 Token 优化方案。技术特点包括:
- 零维护成本:Skill 自动演化,无需手动更新
- 显著效果:Token 消耗降低 45%+
- 低接入门槛:15 分钟完成配置
- 生态协同:云端共享机制放大个体收益
对于中重度 OpenClaw 用户,OpenSpace 是当前最具性价比的 Token 优化方案。