前言
最近入手了 RDK X5 开发板,想在上面跑 ROS 2。本以为是个简单的活儿,结果折腾了2-3个小时,踩了无数坑。写这篇文章记录一下,希望能帮到后面入坑的同学。
环境说明
开发板:RDK X5(地瓜机器人)
系统:Ubuntu 22.04 LTS (aarch64)
ROS 2 版本:Humble Hawksbill
第一章:连接开发板
1.1 找到板子的 IP 地址
给板子通电后,在终端输入:
ip a
找到 wlan0 或 eth0 下面的 IP 地址,比如 192.168.0.104。
1.2 SSH 登录
在电脑上打开终端(Windows 可以用 MobaXterm 或 PowerShell):
我是在Windows的cmd命令中输入的(1:测试了VNC view太卡了,2:SSH右键copy没用,输入命令不方便)
bash
密码是多少?我试过好几个:
尝试 用户名 密码 结果
1 sunrise yahboom ❌
2 root yahboom ❌
3 sunrise sunrise ❌
4 root root ❌
最后发现是自己改过密码忘了......所以如果你也是改过密码,先确认一下。改过密码的最好还是该回去,用sunrise就行了,我就是,实在不行,重新烧录系统是最快的方法(太麻烦尽量别选)。
教训:RDK X5 千万不要随便用 passwd 改密码,改了容易出问题。
第二章:安装 ROS 2
2.1 更换国内源(重要!)
RDK X5 默认的 Ubuntu 源在国外,下载速度感人。换成阿里云源:
bash
备份原源
sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak
替换为阿里云源
sudo sed -i 's|http://archive.ubuntu.com|https://mirrors.aliyun.com|g' /etc/apt/sources.list
sudo sed -i 's|http://security.ubuntu.com|https://mirrors.aliyun.com/ubuntu-security\|g' /etc/apt/sources.list
更新
sudo apt update
2.2 添加 ROS 2 源
bash
添加 ROS 2 的 GPG 密钥
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
添加阿里云的 ROS 2 源
echo "deb arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg https://mirrors.aliyun.com/ros2/ubuntu $(lsb_release -cs) main" | sudo tee /etc/apt/sources.list.d/ros2.list
2.3 安装 ROS 2 Humble 桌面版
bash
sudo apt update
sudo apt install -y ros-humble-desktop
这一步需要下载几百 MB,大概 10-20 分钟,耐心等待。
2.4 配置环境变量
bash
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc
source ~/.bashrc
第三章:踩坑实录
坑1:sudo rosdep init 失败
这个命令死活连不上,报各种网络错误。折腾了半天,最后发现其实可以跳过,不影响 ROS 2 核心功能使用。
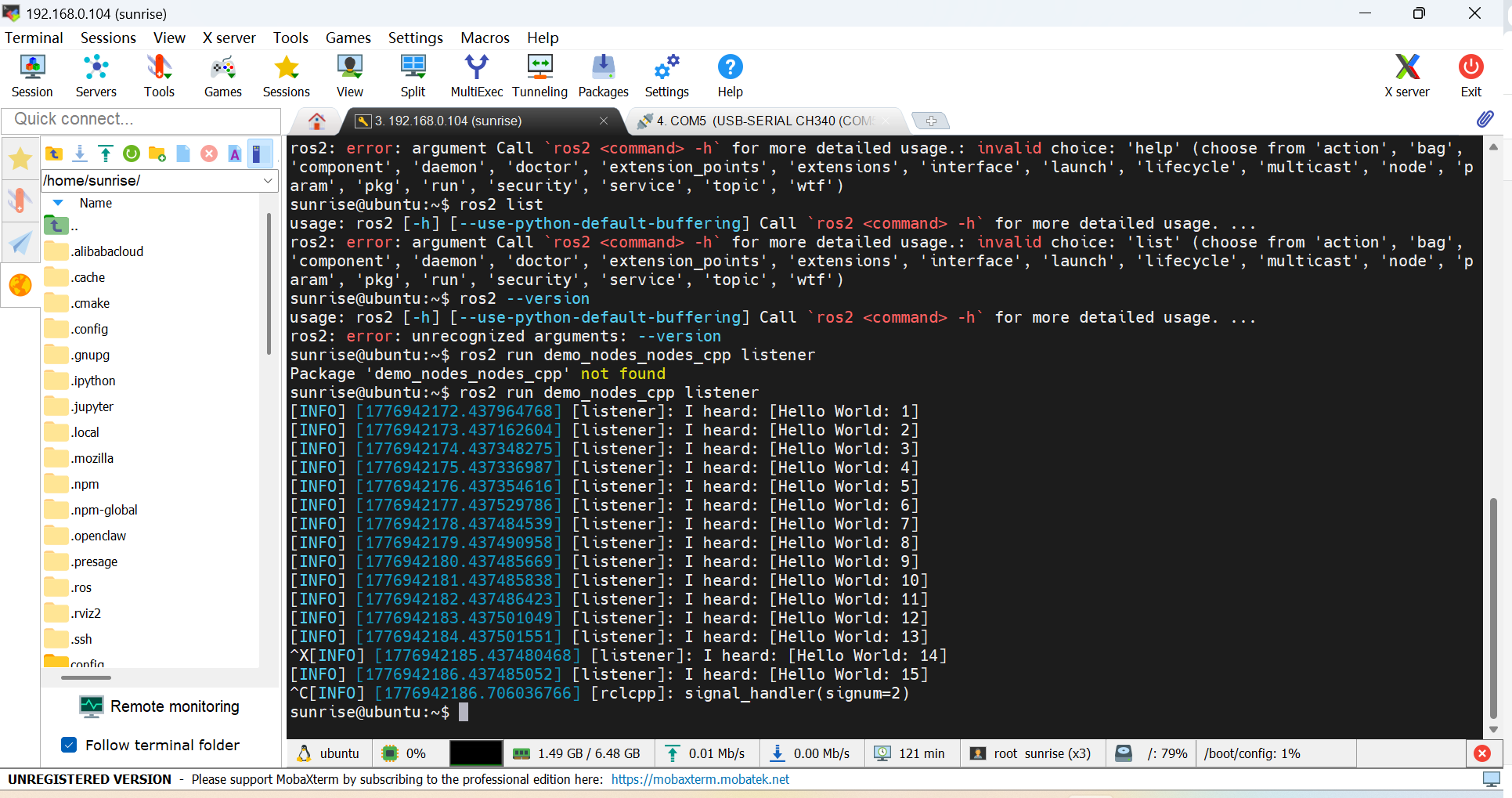
坑2:ros2 命令不认 --version
安装完后,输入 ros2 --version 报错:
text
ros2: error: unrecognized arguments: --version
当时吓一跳,以为装坏了。后来发现 ros2 node list 能正常运行,只是 --version 这个参数在这个版本的 ROS 2 里不支持。虚惊一场。
坑3:ros2 help 也报错
text
invalid choice: 'help'
后来才知道,正确的用法是 ros2 -h 或者 ros2 --help。
经验:遇到奇怪的报错,先换个命令试试,别着急重装。
坑4:VNC 桌面卡成幻灯片
RDK X5 的图形界面是用 CPU 模拟的,操作起来跟幻灯片一样。后来直接用 SSH 命令行,整个世界都顺畅了,但是SSH使用起来也不方便,后面还是使用了Windows自带的cmd搞定
建议:把这板子当"算力盒子",别当电脑用。所有开发都在命令行里做。
第四章:验证成功
4.1 检查 ROS 2 核心文件
bash
ls /opt/ros/humble/
能看到 bin、lib、setup.bash 等目录,说明安装成功。
4.2 运行官方示例节点
打开一个终端,运行 talker:
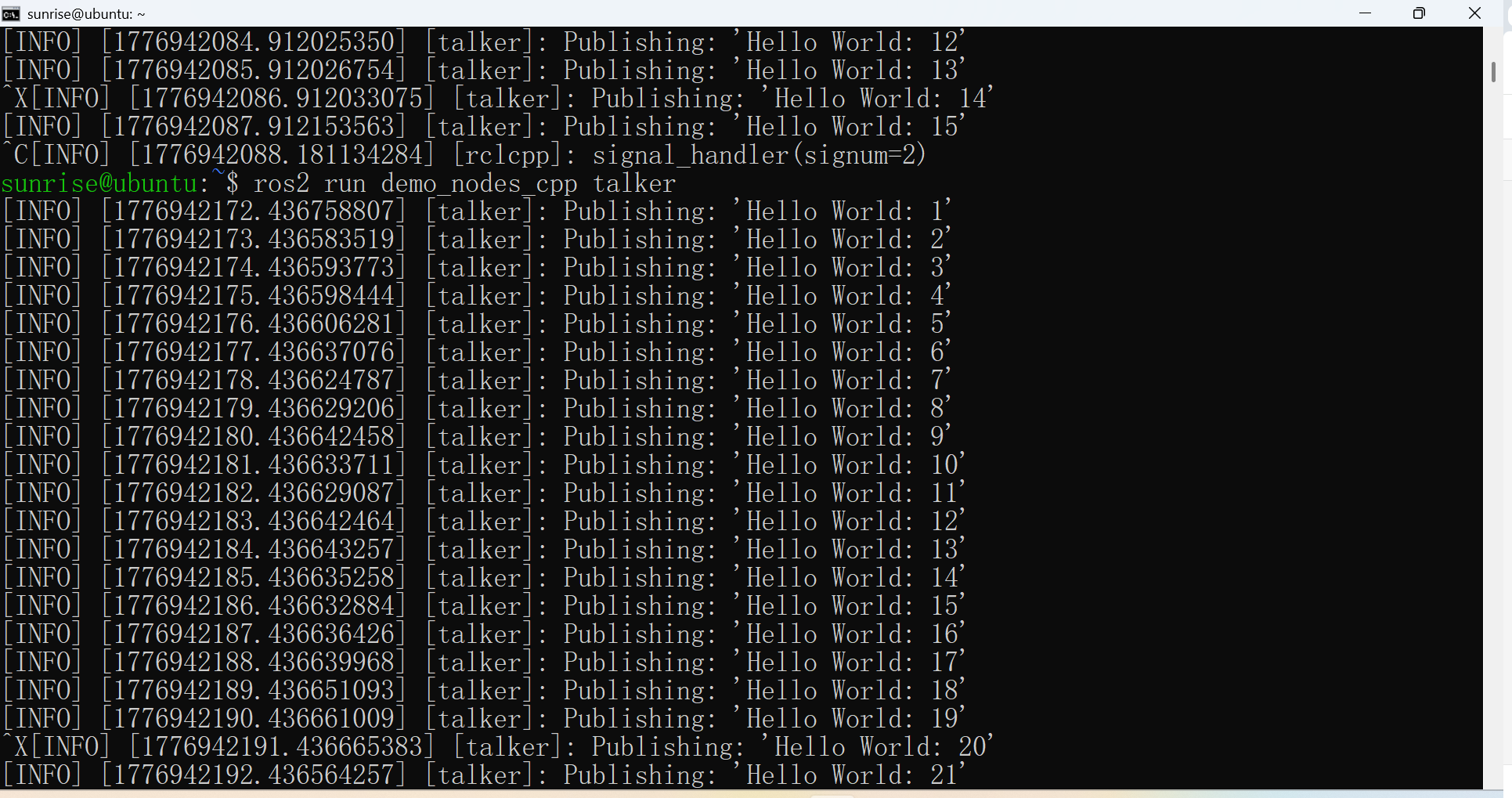
bash
ros2 run demo_nodes_cpp talker
再打开一个新终端(SSH 再连一次),运行 listener:
bash
ros2 run demo_nodes_cpp listener