文章目录
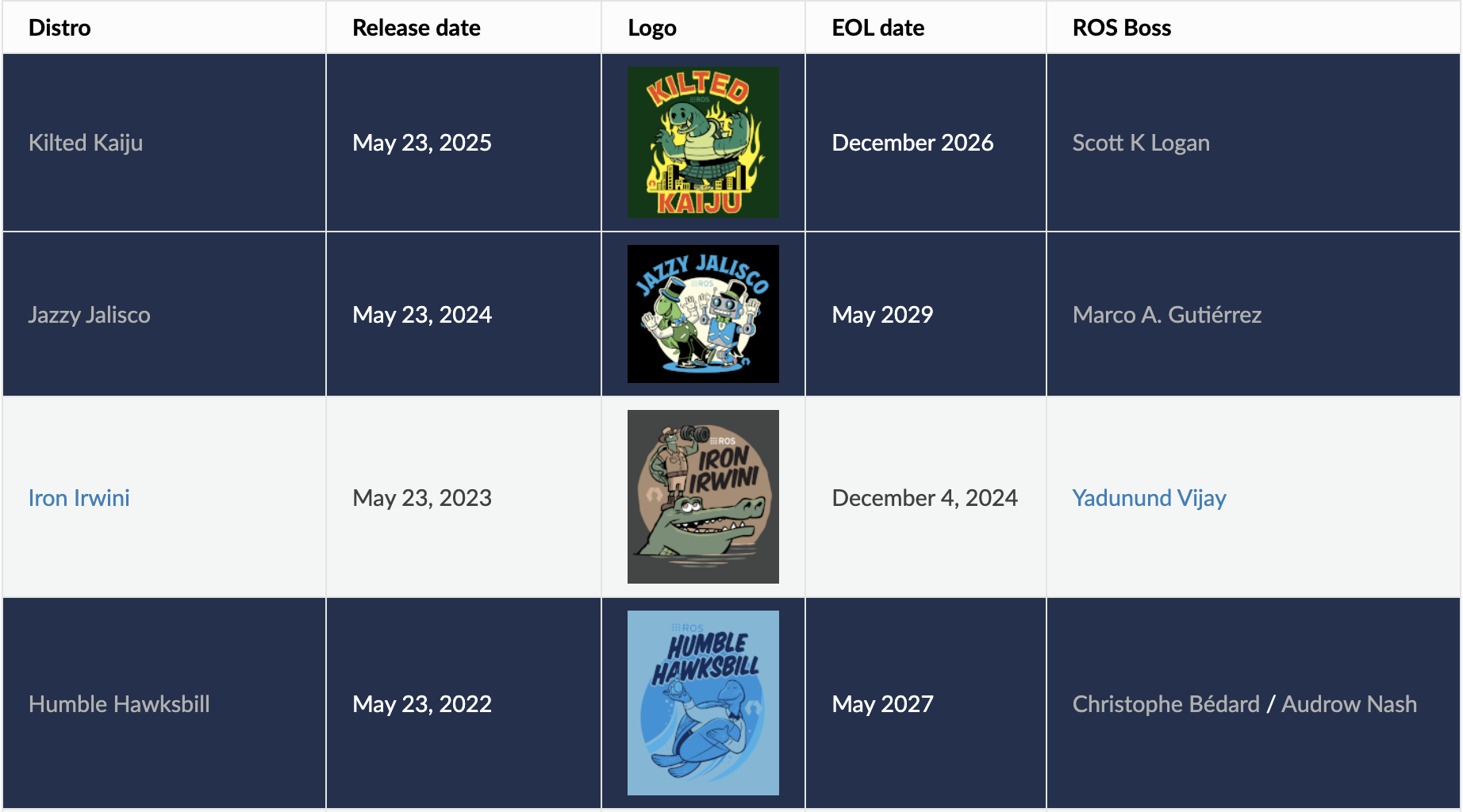
选择版本
官网:
下载过程暂时没有,现在不是docker就是服务器配好的
加载全局ros
bash
# 直接放终端配置里
vim .bashrc
# 加载全局的ros
source /opt/ros/jazzy/setup.bash 测试
bash
# 1st bash
ros2 run demo_nodes_cpp talker
# 2nd bash
ros2 run demo_nodes_cpp listenerbuild workspace
bash
mkdir ros2_ws
mkdir src
bash
# 在workspace下,创建工作目录
colcon build
bash
cd install
ls
# local_setup.bash 只会引用工作空间的ros
# setup.bash 会引用全局的ros
source setup.bash
bash
# 直接放终端配置里
vim .bashrc
# 加载自定义的ros packages
source ~/ros2_ws/install/setup.bash