最近做了一个实时全景拼接项目,整理下实际效果。
先说结果:
在笔记本 RTX3050(Laptop GPU)环境下,
多路 8K 级输入实时拼接,核心拼接耗时稳定 10ms 内
不是单次跑分,而是能持续稳定运行。
支持能力
目前这套方案不是"写死 2 路 / 4 路"的 Demo,而是按项目可灵活配置。
支持:
- 任意路数输入拼接(2路 / 4路 / 8路 / 更多)
- 支持 RTSP / RTMP / 本地视频流 / 摄像头
- 支持 4K / 8K / 更高分辨率
- 支持 主码流 / 辅码流同时输出
- 支持 实时预览 / 推流 / 录像
支持标定文件直接导入
为了适配不同项目现场,目前支持直接导入常见拼接工程文件:
- PTS
- PTO
- 自定义标定参数文件
可直接复用已有标定成果,不需要重复开发。
适合:
- PTGui 工程迁移
- Hugin 工程迁移
- 已有离线拼接方案升级实时化
输入画面
输入源1

输入源2

拼接输出效果
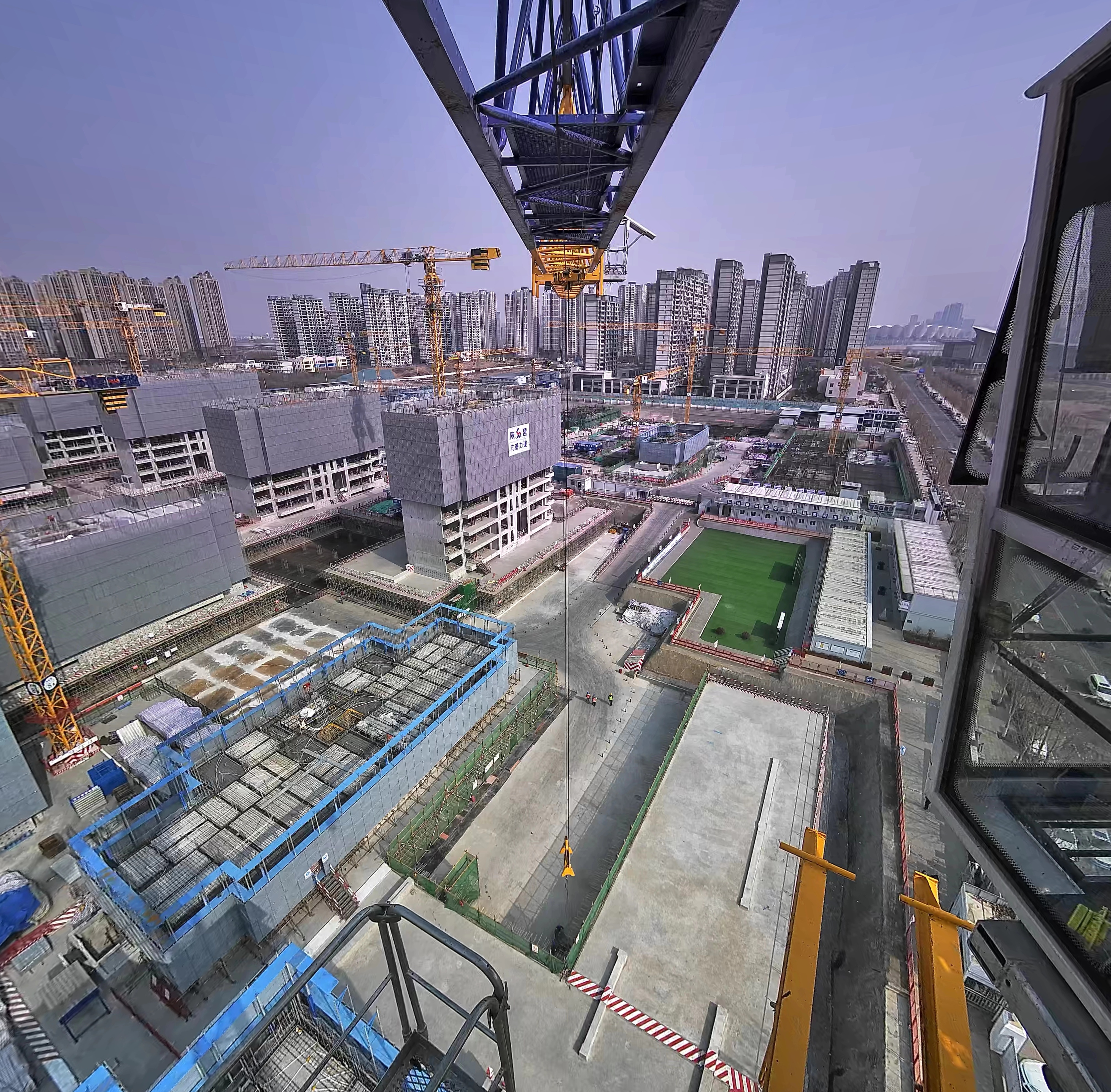
技术方案
我们重点优化的是实时链路,而不是单纯堆 GPU。
主要做了几件事:
1. GPU 直通链路
尽量减少:
CPU ↔ GPU ↔ CPU ↔ GPU
无效搬运。
核心路径尽量保持:
解码 → GPU拼接 → GPU编码
2. 最新帧优先
实时项目最怕堆旧帧。
策略:
宁可丢旧帧,不堆旧帧。
适合:
- 安防监控
- 工业巡检
- 远程操控
- 机器人视觉
- 车载视觉
3. 支持动态扩展
路数不是写死的:
- 新增一路输入即可加入拼接
- 可调整布局
- 可切换输出尺寸
适合项目快速部署。
性能情况
测试环境:
- RTX3050 Laptop GPU
测试结果:
拼接耗时稳定 10ms 内
业务预算参考:
| 帧率 | 帧预算 |
|---|---|
| 25fps | 40ms |
| 30fps | 33ms |
剩余预算可用于:
- 解码
- 编码
- OSD
- 推流
- 网络抖动缓冲
适用项目
目前适合:
- 工地塔吊全景监控
- 园区全景监控
- 工业巡检
- 多路 RTSP 拼接
- 全景直播
- 机器人视觉融合
- 车载视觉融合
交流 / 合作
如果你在做类似项目:
- 多路视频拼接
- 全景监控
- GPU实时处理
- 现有方案延迟高 / 不稳定
可以直接交流。
按你的参数测试:
- 路数
- 分辨率
- 帧率
- 部署环境
给你实际效果。