Signal Processing for TDM MIMO FMCW Millimeter-Wave Radar Sensors
DOPPLER PROCESS
雷达为了测量速度可以发送两个chirp 信号,假如时间间隔为TcT_cTc,速率为vvv,经过时间TcT_cTc目标移动了Δr=vTc\Delta r=vT_cΔr=vTc,根据中频信号模型得式9和式10,频偏和相位变化可以表示:
Δf=2SΔr/c=2SvTc/c(19) \Delta f=2S\Delta r/c=2SvT_c/c \tag{19} Δf=2SΔr/c=2SvTc/c(19)
Δϕ=4πΔr/λ=4πvTc/λ(20) \Delta \phi=4\pi\Delta r/\lambda=4\pi v T_c/\lambda \tag{20} Δϕ=4πΔr/λ=4πvTc/λ(20)
因为TcT_cTc 非常小所以Δf\Delta fΔf可以忽略不记,相位变化量Δϕ\Delta \phiΔϕ可以通过移动距离Δr\Delta rΔr来得到
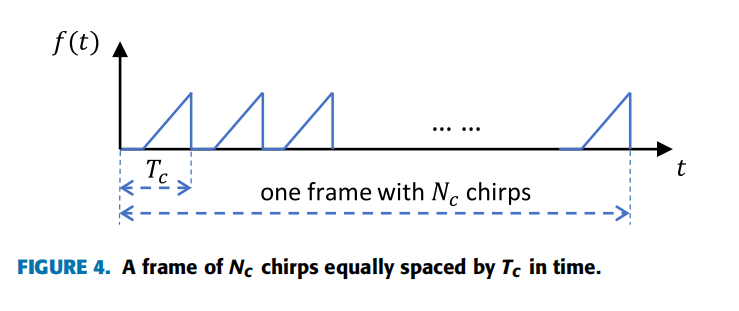
如图4所示雷达发送NcN_cNc个chirp,每个chrip得间隔为TcT_cTc,NcN_cNc个chirp集合我们称为一个chirp帧。定义xmn,0≤n≤Nsx_{m}n,0\le n\le N_sxmn,0≤n≤Ns,xmnx_{m}nxmn 表示第mmm个chrip的第nnn个采样点,NsN_sNs为一个chirp总的采样点数。第mmm个chirp的距离DFT可以表示为:
Xmk=∣Xmk∣ejϕmk=DFT{xmn}(21) X_{m}k=|X_{m}k|e^{j\phi_{m}k}=\mathcal{DFT}\{x_{m}n\}\tag{21} Xmk=∣Xmk∣ejϕmk=DFT{xmn}(21)
对于单个移动物体,因为在式子19中当TcT_cTc很小的时候,Δf\Delta fΔf可以忽略。从式15中可以看到当给定一个kkk(频率),角频率ωIF\omega_{IF}ωIF和幅度XmkX_{m}kXmk保持恒定。基于式20XmkX_{m}kXmk相位会在不同的chirp间线性变化,因此可得:
∣Xmk∣=∣X0k∣(22) |X_{m}k|=|X_{0}k|\tag{22} ∣Xmk∣=∣X0k∣(22)
ϕmk=ϕ0k+4πvTcλm(23) \phi_{m}k=\phi_{0}k+\frac{4\pi vT_{c}}{\lambda}m\tag{23} ϕmk=ϕ0k+λ4πvTcm(23)
跟进一步定义
ykm=Xmk=X0kejmωv(24) y_{k}m=X_{m}k=X_{0}ke^{jm\omega_{v}}\tag{24} ykm=Xmk=X0kejmωv(24)
ωv=4πvTc/λ(25) \omega_{v}=4\pi vT_c/\lambda \tag{25} ωv=4πvTc/λ(25)
其中mmm 表示chirp索引 0≤m≤Nc,0≤k≤Ns0\le m\le N_c,0\le k \le N_s0≤m≤Nc,0≤k≤Ns,
由上可得对于一个给定的kkk,ykmy_{k}mykm是一个有限时域复指数信号,时域角频率为ωv\omega_vωv。
通距离DFT相似,可以对ykmy_{k}mykm进行DFT从而获得速率,其Doppller域的DFT可以定义如下:
Ykl=DFT{ykm}=X0kPNc(2πNcl−ωv)(26) Y_{k}l=DFT\{y_{k}m\}=X_{0}kP_{N_c}\left(\frac{2\pi }{N_c}l-\omega_v \right) \tag{26} Ykl=DFT{ykm}=X0kPNc(Nc2πl−ωv)(26)
根据傅里叶变换理论时域角频率ωl=2πlNc\omega_l=\frac{2\pi l}{N_c}ωl=Nc2πl,由于−π≤ωv≤π-\pi\le\omega_v\le \pi−π≤ωv≤π,所以−Nc/2≤l≤Nc/2-N_c/2 \le l\le N_c/2−Nc/2≤l≤Nc/2,找到其峰值所以应的ωl\omega_lωl,根据式25即可得到速率v
vl=ωlλ4πTc=2πlNcλ4πTc=lλ2NcTc=lλ2Tf(27) v_l=\omega_l\frac{\lambda}{4\pi T_c}=\frac{2\pi l}{N_c}\frac{\lambda}{4\pi T_c}=l\frac{\lambda}{2 N_c T_c}=l\frac{\lambda}{2T_f} \tag{27} vl=ωl4πTcλ=Nc2πl4πTcλ=l2NcTcλ=l2Tfλ(27)
其中Tf=NcTcT_f=N_cT_cTf=NcTc,由上也可的速率的分辨率为:
vres=λ2Tf v_{res}=\frac{\lambda}{2T_f} vres=2Tfλ
又−Nc/2≤l≤Nc/2-N_c/2\le l\le N_c/2−Nc/2≤l≤Nc/2,所以:
−λ4Tc≤v≤λ4Tc(28) -\frac{\lambda}{4T_c} \le v\le \frac{\lambda}{4T_c}\tag{28} −4Tcλ≤v≤4Tcλ(28)
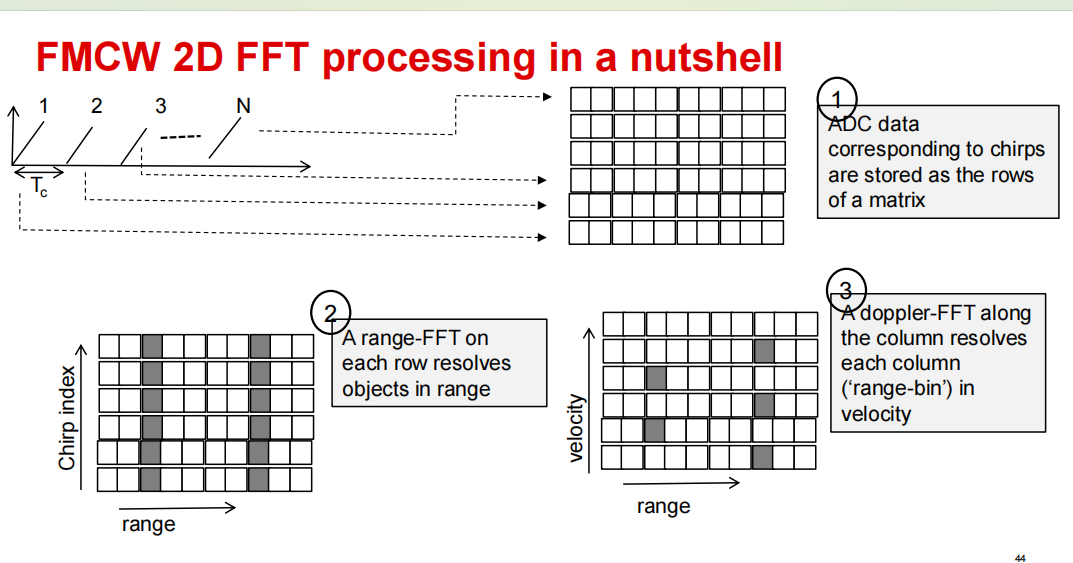
FMCW 2D FFT processing
综上距离和速率实际上可以使用一个二维的DFT来描述,chirp内部称为快时间FFT可以得到距离,chirp间称为慢时间FFT可以获得速度: