前言
-
最近手头一个项目,在一个中心有机械臂的麦克纳姆结构的机器人小车上配置导航,由于中心机械臂的阻挡,单一激光雷达难免会由于中心机械臂的阻碍导致实际的数据错误(读到的雷达数据是到机械臂的数据)
-
尽管雷达的启动文件是可以设置数据的裁切角的,但是大面积的数据缺少必定会导致导航订阅错乱,因此单一雷达的方案并不适配此项目。
-
因此本文提出一个全新的方案,通过在车头车尾对角线的位置安放
两个激光雷达,通过坐标变换+点云融合+ROI过滤+反投影生成LaserScan,最后达到如下的效果。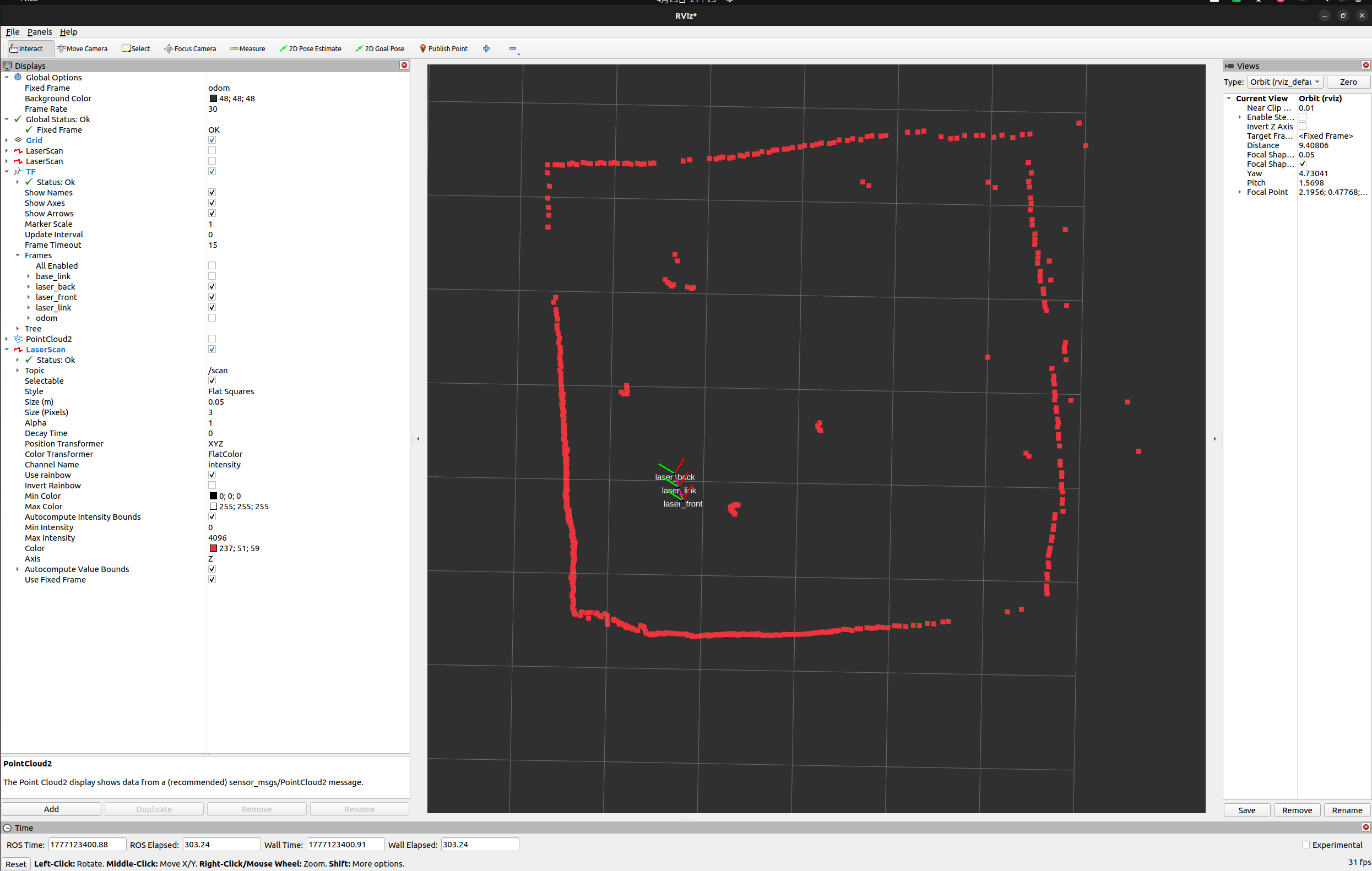
-
本文使用的环境与硬件为:
- Ubuntu22.04LTS ROS2
- 雷达:镭神智能 N10 2D激光雷达 X 2
1 多雷达启动与安装
1-1 什么串口重命名
- 在 Linux 中,USB设备默认映射为:
bash
/dev/ttyUSB0
/dev/ttyUSB1
/dev/ttyACM0 - 这种方式存在两个典型问题:
- 设备重启后编号变化
- 更换USB口后设备名漂移
- 因此工程上必须使用 udev 规则进行固定映射,例如:
bash
/dev/ttyACM0 → /dev/lidar_front
/dev/ttyACM1 → /dev/lidar_back- 本质:通过设备硬件信息生成稳定软链接。
1-2 多雷达串口规则制定
- 官方一般会提供单雷达绑定规则,但多雷达场景直接复用会冲突,因此需要重构逻辑。
- 例如下面是官方提供的脚本
bash
#CP2102 串口号0001 设置别名为wheeltec_lidar
echo 'KERNEL=="ttyUSB*", ATTRS{idVendor}=="10c4", ATTRS{idProduct}=="ea60",ATTRS{serial}=="0001", MODE:="0777", GROUP:="dialout", SYMLINK+="wheeltec_lidar"' >/etc/udev/rules.d/wheeltec_lidar.rules
#CH9102,同时系统安装了对应驱动 串口号0001 设置别名为wheeltec_lidar
echo 'KERNEL=="ttyCH343USB*", ATTRS{idVendor}=="1a86", ATTRS{idProduct}=="55d4",ATTRS{serial}=="0001", MODE:="0777", GROUP:="dialout", SYMLINK+="wheeltec_lidar"' >/etc/udev/rules.d/wheeltec_lidar2.rules
#CH9102,同时系统没有安装对应驱动 串口号0001 设置别名为wheeltec_lidar
echo 'KERNEL=="ttyACM*", ATTRS{idVendor}=="1a86", ATTRS{idProduct}=="55d4",ATTRS{serial}=="0001", MODE:="0777", GROUP:="dialout", SYMLINK+="wheeltec_lidar"' >/etc/udev/rules.d/wheeltec_lidar3.rules
service udev reload
sleep 2
service udev restart- 但是上述脚本仅适用单一雷达的暴力重命名,对于多激光雷达是存在问题的,因此我这里我们重新为其编写逻辑,一般情况下,雷达对应的设备名和USB拓扑会是如下格式
| 设备 | USB拓扑 | 结论 |
|---|---|---|
| ttyACM0 | 1-1.2.3:1.0 |
雷达A |
| ttyACM1 | 1-1.1:1.4 |
️ 不是雷达(可能是控制/虚拟口) |
| ttyACM2 | 1-1.2.2:1.0 |
雷达B |
- 核心规则:
只有以
:1.0结尾的USB设备才认为是雷达主接口
1-2-1 自动识别脚本实现
bash
#!/bin/bash
# 此脚本用于自动检测多雷达设备,并给雷达进行/dev/ttyACM*的重映射
set -e
RULE_FILE="/etc/udev/rules.d/99-dual-lidar.rules"
echo "[INFO] Scanning ttyACM devices..."
ACM_LIST=($(ls /dev/ttyACM* 2>/dev/null || true))
if [ ${#ACM_LIST[@]} -lt 2 ]; then
echo "[ERROR] Not enough ACM devices"
exit 1
fi
echo "[INFO] Raw devices:"
printf '%s\n' "${ACM_LIST[@]}"
# -----------------------------
# 判断是否雷达
# -----------------------------
is_lidar() {
local dev=$1
local kernel
kernel=$(udevadm info -a -n "$dev" | grep KERNELS | head -n 1 | awk -F'"' '{print $2}')
# 必须是 :1.0 结尾(雷达常见)
if [[ "$kernel" == *":1.0"* ]]; then
echo "$kernel"
return 0
fi
return 1
}
LIDAR_DEVICES=()
LIDAR_KERNELS=()
# -----------------------------
# 筛选雷达
# -----------------------------
for dev in "${ACM_LIST[@]}"; do
kernel=$(udevadm info -a -n "$dev" | grep KERNELS | head -n 1 | awk -F'"' '{print $2}')
echo "[CHECK] $dev -> $kernel"
if [[ "$kernel" == *":1.0"* ]]; then
LIDAR_DEVICES+=("$dev")
LIDAR_KERNELS+=("$kernel")
echo "[OK] LiDAR detected: $dev"
else
echo "[SKIP] Not lidar: $dev"
fi
done
# -----------------------------
# 检查是否找到2个雷达
# -----------------------------
if [ ${#LIDAR_KERNELS[@]} -lt 2 ]; then
echo "[ERROR] Less than 2 lidar devices found"
exit 1
fi
FRONT=${LIDAR_KERNELS[0]}
BACK=${LIDAR_KERNELS[1]}
echo "[INFO] FRONT = $FRONT"
echo "[INFO] BACK = $BACK"
# -----------------------------
# 写 udev
# -----------------------------
cat <<EOF > $RULE_FILE
# Auto dual lidar mapping (rule-based detection)
KERNELS=="$FRONT", SYMLINK+="lidar_front", MODE="0777", GROUP="dialout"
KERNELS=="$BACK", SYMLINK+="lidar_back", MODE="0777", GROUP="dialout"
EOF
# -----------------------------
# reload
# -----------------------------
udevadm control --reload-rules
udevadm trigger
sleep 2
echo "[RESULT]"
ls -l /dev/lidar* 2>/dev/null || echo "no symlinks yet"
echo "[DONE]"- 需要注意的是上述雷达重命名会随机分配
lidar_front和lidar_back,因此具体哪个放前面哪个放后面需要根据分配后的脚本进行测试 - 执行上述脚本后,以后我们就可以通过
/dev/lidar_front和/dev/lidar_back,即便是更换了不同USB接口,这个规则仍然生效。
1-3 启动文件配置
- 在配置上述
udev规则后,我们就可以更改官方雷达启动节点的配置文件,就可以顺利启动雷达 了 - 以镭神N10雷达启动的配置脚本为例子,我们只需要修改
serial_port分别为/dev/lidar_front和/dev/lidar_back即可,同时我们需要分别给不同的雷达配置不同的坐标系和话题名称,以便后面我们使用
yaml
x10:
lslidar_driver_node:
ros__parameters:
lidar_type: "X10" # 雷达类型
lidar_model: "N10" # 雷达型号 M10 M10GPS M10P N10 N10Plus N301
# serial_port: "" # 雷达连接串口名称 使用网口请将值改为空
serial_port: "/dev/lidar_front" # 雷达连接串口名称 使用网口请将值改为空
device_ip: "192.168.1.200" # 雷达IP地址
msop_port: 2368 # 雷达目的数据端口
difop_port: 2369 # 雷达目的设备端口
packet_rate: 188.0 # PCAP文件回放速率,离线解析PCAP数据时使用
# 点云处理参数
frame_id: "laser_front" # 坐标系名称
pointcloud_topic: "lslidar_point_cloud_front" # 点云话题名
laserscan_topic: "/scan_front" # 发布 LaserScan 数据话题名称1-4 tf2静态坐标变换
- 双雷达安装在车体对角,因此必须建立统一坐标系,结构如下:
bash
base_link
└── laser_link
├── laser_front
└── laser_back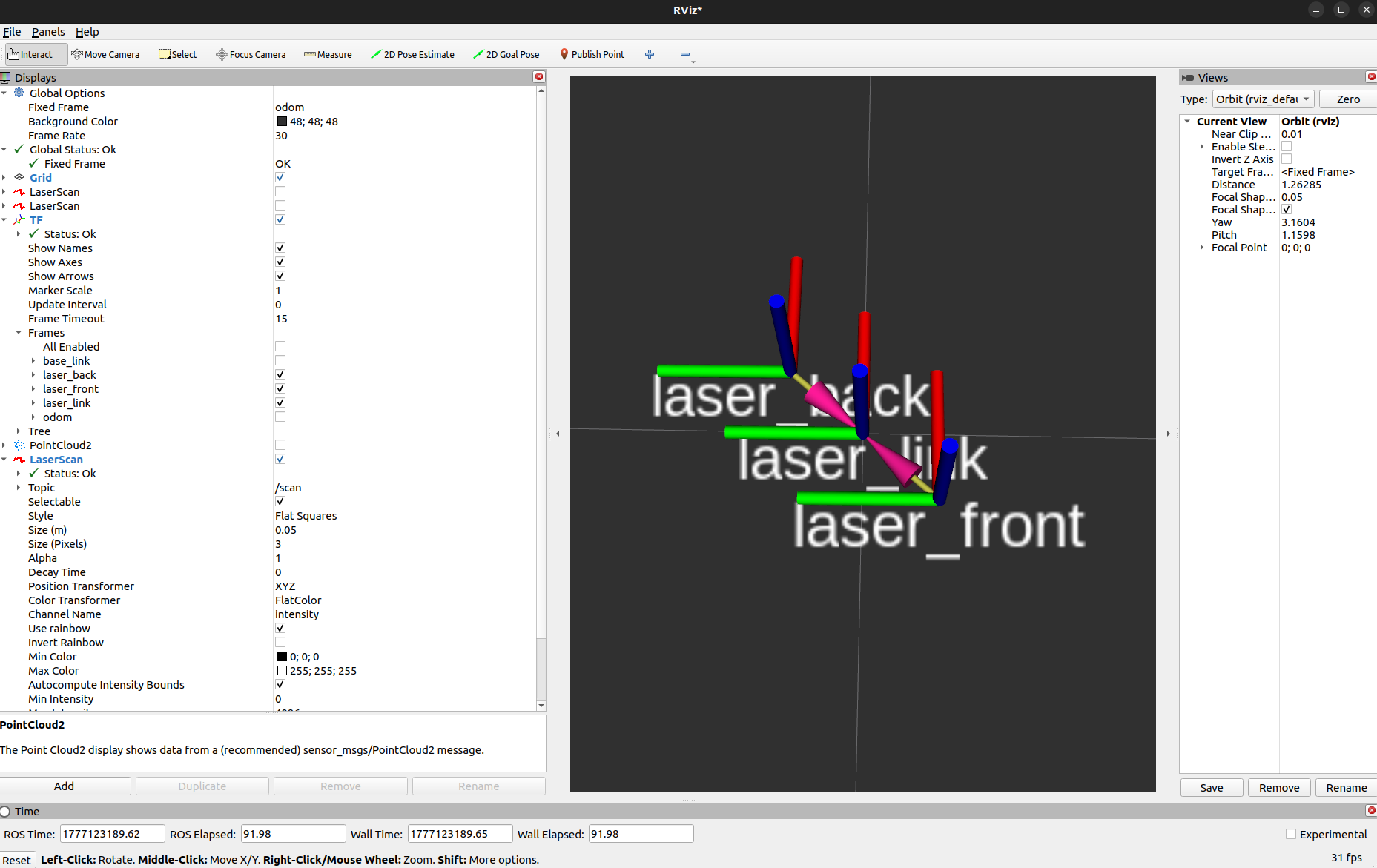
- 需要注意的是,为了节省算力这里我们发布的是静态坐标变换,因此要保证两个对角激光雷达的安装
都是正面超前的!!否则如果两个雷达一正一反,使用静态坐标变换后有一个雷达生成的数据会跟着坐标轴一起旋转(当然你可以使用动态坐标变换来解决这个问题 - 为了在双雷达节点发布的同时发布tf2坐标变换,我们可以把双雷达的启动和tf2坐标变换绑在一起,写成一个
launch.py节点
python
Node(
package='tf2_ros',
executable='static_transform_publisher',
arguments=['0', '0', '0', '0', '0', '0',
'base_link', 'laser_link']
),
Node(
package='tf2_ros',
executable='static_transform_publisher',
arguments=['0.10', '0.11', '0', '0', '0', '0',
'laser_link', 'laser_back']
),
Node(
package='tf2_ros',
executable='static_transform_publisher',
arguments=['-0.10', '-0.11', '0', '0', '0', '0',
'laser_link', 'laser_front']
),- 完整
launch文件见后面 - 相关的坐标参数请根据实际的相对安装位置设置,这里提供注释
python
arguments=[
'-0.10', '-0.11', '0',
'0', '0', '0',
'laser_link', 'laser_front'
]- tf2静态坐表变换的参数分别是平移和旋转
x y z roll pitch yaw - 然后后面两个参数是:
父坐标系(parent frame),子坐标系(child frame)
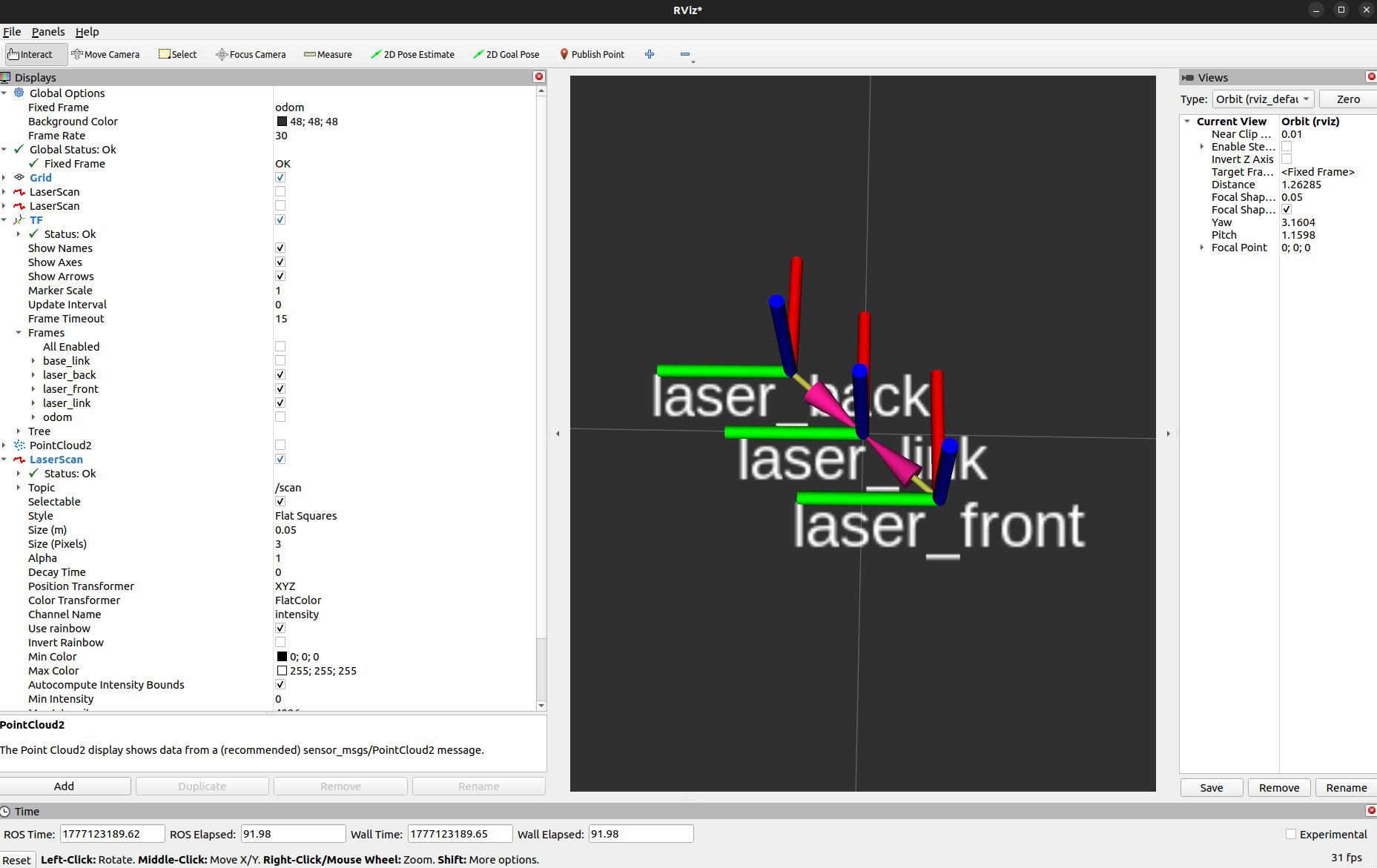
1-5 启动测试
- -RViz2中设置 global frame =
odom
- 可观察到:
- 前雷达遮挡区域
- 后雷达盲区补全
- 中心机械臂干扰明显存在
2 多雷达融合实现
2-1 整体任务分析
- 我们简单分析一下我们接下来需要做的内容
- 订阅双雷达数据
- 把双雷达数据从各自的坐标系上变换回车辆中心的
laser_link - 将双雷达数据进行融合即可
- 看起来很简单,这是却存在一个问题,我们来看一下基础雷达的数据结构,在终端输入
ros2 interface show sensor_msgs/msg/LaserScan查询基础的雷达信息:
bash
# Single scan from a planar laser range-finder
#
# If you have another ranging device with different behavior (e.g. a sonar
# array), please find or create a different message, since applications
# will make fairly laser-specific assumptions about this data
std_msgs/Header header # timestamp in the header is the acquisition time of
builtin_interfaces/Time stamp
int32 sec
uint32 nanosec
string frame_id
# the first ray in the scan.
#
# in frame frame_id, angles are measured around
# the positive Z axis (counterclockwise, if Z is up)
# with zero angle being forward along the x axis
float32 angle_min # start angle of the scan [rad]
float32 angle_max # end angle of the scan [rad]
float32 angle_increment # angular distance between measurements [rad]
float32 time_increment # time between measurements [seconds] - if your scanner
# is moving, this will be used in interpolating position
# of 3d points
float32 scan_time # time between scans [seconds]
float32 range_min # minimum range value [m]
float32 range_max # maximum range value [m]
float32[] ranges # range data [m]
# (Note: values < range_min or > range_max should be discarded)
float32[] intensities # intensity data [device-specific units]. If your
# device does not provide intensities, please leave
# the array empty.- 可以看到雷达的基础数据存储是一个循环的数组,简单的进行范围截取组合必然会出现大量的问题,因此我们不能直接进行合并。
- 因此本文提供的方案是,将双雷达的数据转为2维世界的点云数据,这时候,数据合并和范围截取的事情都变得非常方便,最后在将合并后的点云数据转为雷达数据发布即可。
2-2 完整代码实现
- 我们先看完整实现再仔细讲解
cpp
#include <rclcpp/rclcpp.hpp>
#include <sensor_msgs/msg/laser_scan.hpp>
#include <mutex>
#include <cmath>
#include <limits>
#include <laser_geometry/laser_geometry.hpp>
#include <tf2_ros/transform_listener.h>
#include <tf2_ros/buffer.h>
#include <sensor_msgs/msg/point_cloud2.hpp>
#include <tf2_sensor_msgs/tf2_sensor_msgs.hpp>
#include <pcl_conversions/pcl_conversions.h>
#include <pcl/point_types.h>
#include <pcl/filters/crop_box.h>
class ScanFusionNode : public rclcpp::Node
{
public:
ScanFusionNode() : Node("scan_fusion_node")
{
front_sub_ = create_subscription<sensor_msgs::msg::LaserScan>(
"/scan_front", 10,
std::bind(&ScanFusionNode::frontCallback, this, std::placeholders::_1));
back_sub_ = create_subscription<sensor_msgs::msg::LaserScan>(
"/scan_back", 10,
std::bind(&ScanFusionNode::backCallback, this, std::placeholders::_1));
scan_pub_ = create_publisher<sensor_msgs::msg::LaserScan>("/scan", 10);
timer_ = this->create_wall_timer(
std::chrono::milliseconds(100),
std::bind(&ScanFusionNode::timerCallback, this));
tf_buffer_ = std::make_shared<tf2_ros::Buffer>(this->get_clock());
tf_listener_ = std::make_shared<tf2_ros::TransformListener>(*tf_buffer_);
cloud_pub_ = create_publisher<sensor_msgs::msg::PointCloud2>("/scan_fused_cloud", 10);
std::cout<<"ScanFusionNode start!"<<std::endl;
}
private:
rclcpp::Subscription<sensor_msgs::msg::LaserScan>::SharedPtr front_sub_;
rclcpp::Subscription<sensor_msgs::msg::LaserScan>::SharedPtr back_sub_;
rclcpp::Publisher<sensor_msgs::msg::LaserScan>::SharedPtr scan_pub_;
rclcpp::TimerBase::SharedPtr timer_;
sensor_msgs::msg::LaserScan front_scan_;
sensor_msgs::msg::LaserScan back_scan_;
laser_geometry::LaserProjection projector_;
std::shared_ptr<tf2_ros::Buffer> tf_buffer_;
std::shared_ptr<tf2_ros::TransformListener> tf_listener_;
sensor_msgs::msg::PointCloud2 cloud_front_, cloud_back_;
rclcpp::Publisher<sensor_msgs::msg::PointCloud2>::SharedPtr cloud_pub_;
const float x_min = -0.3f;
const float x_max = 0.3f;
const float y_min = -0.3f;
const float y_max = 0.3f;
private:
void frontCallback(const sensor_msgs::msg::LaserScan::SharedPtr msg)
{
try {
projector_.projectLaser(*msg, cloud_front_);
} catch (...) {
RCLCPP_WARN(this->get_logger(), "Front projection failed");
}
}
void backCallback(const sensor_msgs::msg::LaserScan::SharedPtr msg)
{
try {
projector_.projectLaser(*msg, cloud_back_);
} catch (...) {
RCLCPP_WARN(this->get_logger(), "Back projection failed");
}
}
void timerCallback()
{
sensor_msgs::msg::PointCloud2 cloud_front_tf, cloud_back_tf;
try {
tf_buffer_->transform(cloud_front_, cloud_front_tf, "laser_link");
tf_buffer_->transform(cloud_back_, cloud_back_tf, "laser_link");
} catch (tf2::TransformException &ex) {
RCLCPP_WARN(this->get_logger(), "TF failed: %s", ex.what());
return;
}
sensor_msgs::msg::PointCloud2 fused_cloud = cloud_front_tf;
fused_cloud.data.insert(
fused_cloud.data.end(),
cloud_back_tf.data.begin(),
cloud_back_tf.data.end()
);
fused_cloud.width += cloud_back_tf.width;
filterCloud(fused_cloud);
fused_cloud.header.frame_id = "laser_link";
fused_cloud.header.stamp = this->now();
cloud_pub_->publish(fused_cloud);
sensor_msgs::msg::LaserScan scan_out =CloudToScan(fused_cloud, "laser_link");
scan_pub_->publish(scan_out);
}
sensor_msgs::msg::LaserScan CloudToScan(
const sensor_msgs::msg::PointCloud2 &cloud_msg,
const std::string &frame_id,
float angle_min = -M_PI,
float angle_max = M_PI,
float angle_increment = 0.01f,
float range_min = 0.1f,
float range_max = 10.0f)
{
// ===== 1. 转 PCL =====
pcl::PointCloud<pcl::PointXYZ> cloud;
pcl::fromROSMsg(cloud_msg, cloud);
// ===== 2. 初始化 LaserScan =====
sensor_msgs::msg::LaserScan scan;
scan.header.frame_id = frame_id;
scan.angle_min = angle_min;
scan.angle_max = angle_max;
scan.angle_increment = angle_increment;
scan.range_min = range_min;
scan.range_max = range_max;
int size = static_cast<int>((angle_max - angle_min) / angle_increment);
scan.ranges.assign(size, std::numeric_limits<float>::infinity());
// ===== 3. 点云 → scan =====
for (const auto &p : cloud.points)
{
if (!std::isfinite(p.x) || !std::isfinite(p.y))
continue;
float range = std::sqrt(p.x * p.x + p.y * p.y);
if (range < range_min || range > range_max)
continue;
float angle = std::atan2(p.y, p.x);
int idx = static_cast<int>((angle - angle_min) / angle_increment);
if (idx >= 0 && idx < size)
{
scan.ranges[idx] = std::min(scan.ranges[idx], range);
}
}
scan.header.stamp = rclcpp::Clock().now();
return scan;
}
void filterCloud(sensor_msgs::msg::PointCloud2 &cloud)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr pcl_cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::fromROSMsg(cloud, *pcl_cloud);
size_t before_size = pcl_cloud->size();
if(before_size==0)
RCLCPP_WARN(this->get_logger(),"[Filter] No points recieve!");
// CropBox
pcl::CropBox<pcl::PointXYZ> crop;
crop.setInputCloud(pcl_cloud);
crop.setMin(Eigen::Vector4f(x_min, y_min, -1.0, 1.0));
crop.setMax(Eigen::Vector4f(x_max, y_max, 1.0, 1.0));
//关键:删除框内点
crop.setNegative(true);
pcl::PointCloud<pcl::PointXYZ>::Ptr filtered(new pcl::PointCloud<pcl::PointXYZ>);
crop.filter(*filtered);
std::vector<int> indices;
pcl::removeNaNFromPointCloud(*filtered, *filtered, indices);
size_t after_size = filtered->size();
// 因为二者之间有车的框体在,所有一定会有点云被过滤,反之如果没有,那就是炸了
if (after_size >= before_size)
{
RCLCPP_WARN(this->get_logger(),
"[Filter] No points removed! before=%ld after=%ld",
before_size, after_size);
}
pcl::toROSMsg(*filtered, cloud);
}
};
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<ScanFusionNode>());
rclcpp::shutdown();
return 0;
}- 然后我们分别看一下每一个区块的实现逻辑
2-3 雷达订阅与点云转换
cpp
void frontCallback(const sensor_msgs::msg::LaserScan::SharedPtr msg)
{
try {
projector_.projectLaser(*msg, cloud_front_);
} catch (...) {
RCLCPP_WARN(this->get_logger(), "Front projection failed");
}
}
void backCallback(const sensor_msgs::msg::LaserScan::SharedPtr msg)
{
try {
projector_.projectLaser(*msg, cloud_back_);
} catch (...) {
RCLCPP_WARN(this->get_logger(), "Back projection failed");
}
}- 在两个雷达订阅回调函数中,我们直接调用
LaserProjection的projectLaser函数,此函数会将二维雷达转换为三维的点云数据
2-4 坐标变换
cpp
sensor_msgs::msg::PointCloud2 cloud_front_tf, cloud_back_tf;
try {
tf_buffer_->transform(cloud_front_, cloud_front_tf, "laser_link");
tf_buffer_->transform(cloud_back_, cloud_back_tf, "laser_link");
} catch (tf2::TransformException &ex) {
RCLCPP_WARN(this->get_logger(), "TF failed: %s", ex.what());
return;
}- 这里调用了
tf2进行坐标变换,把各自雷达的点云信息从各自的坐标系转换到中心雷达坐标系laser_link - 这一步的转换非常关键,否则后续点云会无法正确拼接
2-5 点云融合(核心操作)
cpp
sensor_msgs::msg::PointCloud2 fused_cloud = cloud_front_tf;
fused_cloud.data.insert(
fused_cloud.data.end(),
cloud_back_tf.data.begin(),
cloud_back_tf.data.end()
);
fused_cloud.width += cloud_back_tf.width;- 这里我们直接进行二进制
data拼接,将前后两个雷达数据进行拼接,同时我们需要更新新的雷达点数width - 这里拼接的前提必须保证前后点云内存结构完全一致,由于我们使用的是完全相同的两个雷达,因此这里直接拼接即可
2-6 点云过滤
- 我们开头的前言提到过,本项目中两个对角激光雷达的中心连线处是一个机械臂,因此我们需要过滤掉中心的点云数据
- 相比与使用雷达数据进行角度剔除可能造成的数据丢失,点云范围剔除就可以在不丢失其他关键点的前提下,精准删除特定范围的点云数据
- 这里我们使用到了点云处理库来辅助我们进行裁切
cpp
void filterCloud(sensor_msgs::msg::PointCloud2 &cloud)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr pcl_cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::fromROSMsg(cloud, *pcl_cloud);
size_t before_size = pcl_cloud->size();
if(before_size==0)
RCLCPP_WARN(this->get_logger(),"[Filter] No points recieve!");
// CropBox
pcl::CropBox<pcl::PointXYZ> crop;
crop.setInputCloud(pcl_cloud);
crop.setMin(Eigen::Vector4f(x_min, y_min, -1.0, 1.0));
crop.setMax(Eigen::Vector4f(x_max, y_max, 1.0, 1.0));
//关键:删除框内点
crop.setNegative(true);
pcl::PointCloud<pcl::PointXYZ>::Ptr filtered(new pcl::PointCloud<pcl::PointXYZ>);
crop.filter(*filtered);
std::vector<int> indices;
pcl::removeNaNFromPointCloud(*filtered, *filtered, indices);
size_t after_size = filtered->size();
// 因为二者之间有车的框体在,所有一定会有点云被过滤,反之如果没有,那就是炸了
if (after_size >= before_size)
{
RCLCPP_WARN(this->get_logger(),
"[Filter] No points removed! before=%ld after=%ld",
before_size, after_size);
}
pcl::toROSMsg(*filtered, cloud);
}- 通过上述函数,我们将构建一个
ROI盒子,这个盒子的范围我们设置为车体的大小
bash
x: [-0.3, 0.3]
y: [-0.3, 0.3]- 通过
filterCloud函数后,我们将删除以laser_link为中心ROI大小的所有点云信息
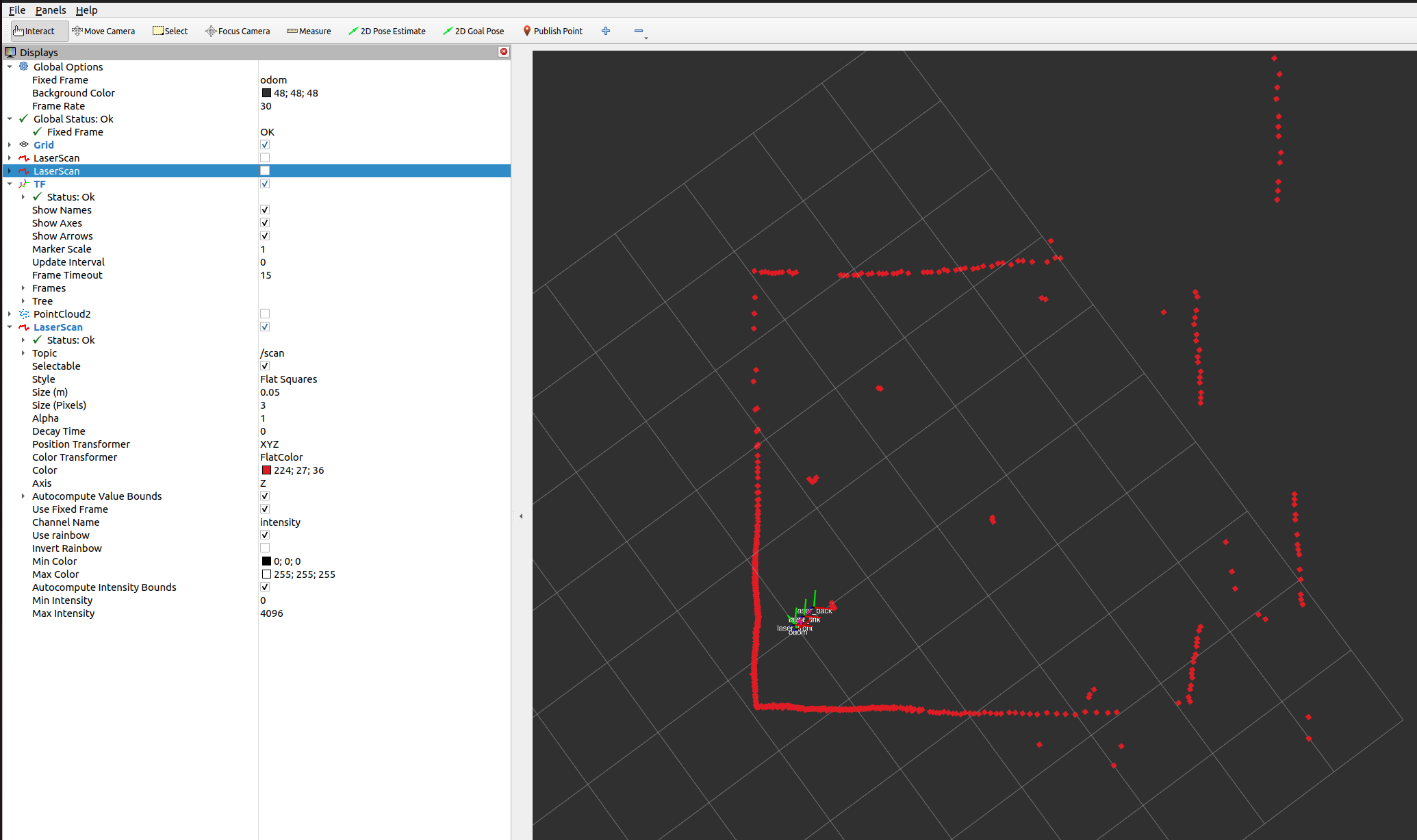
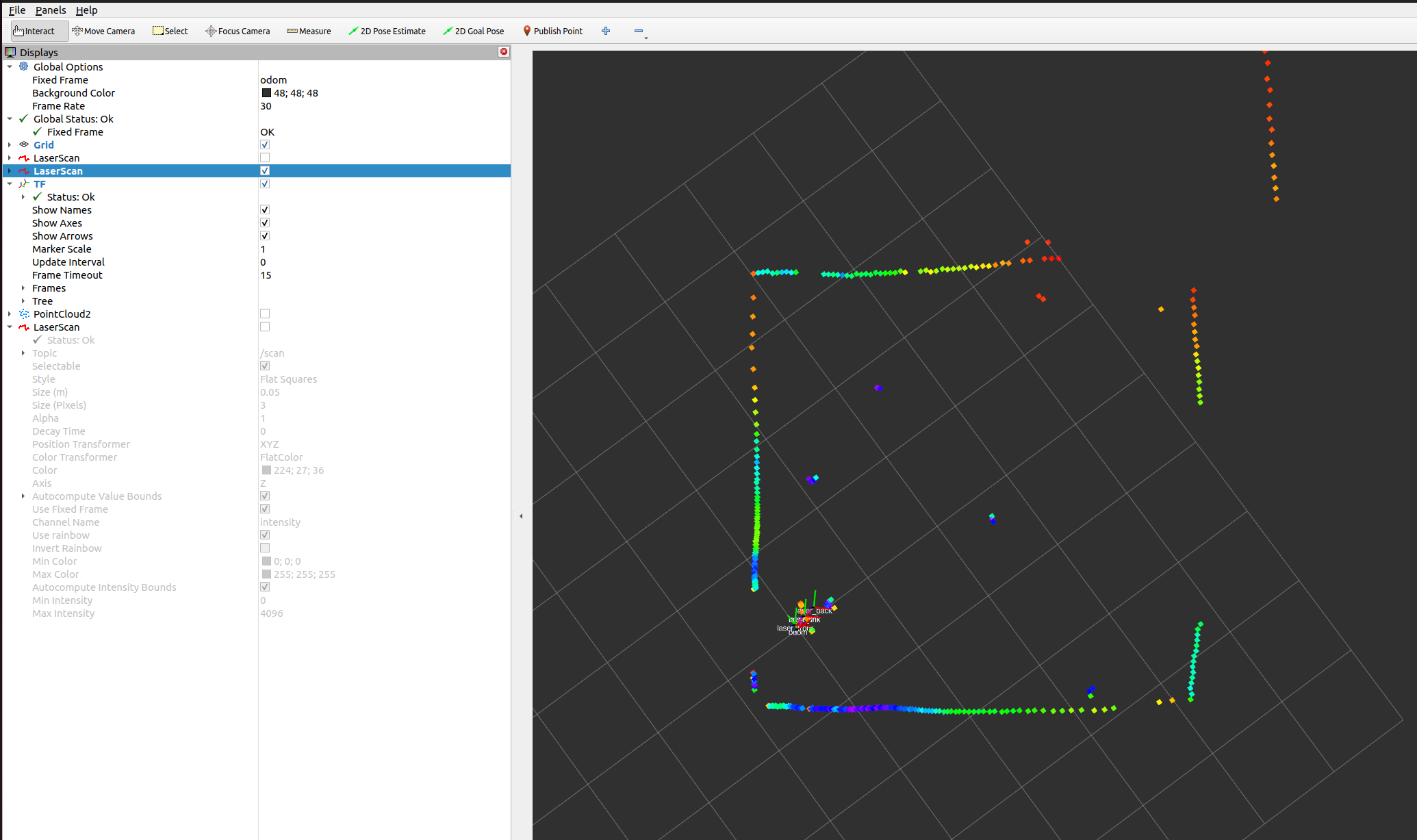
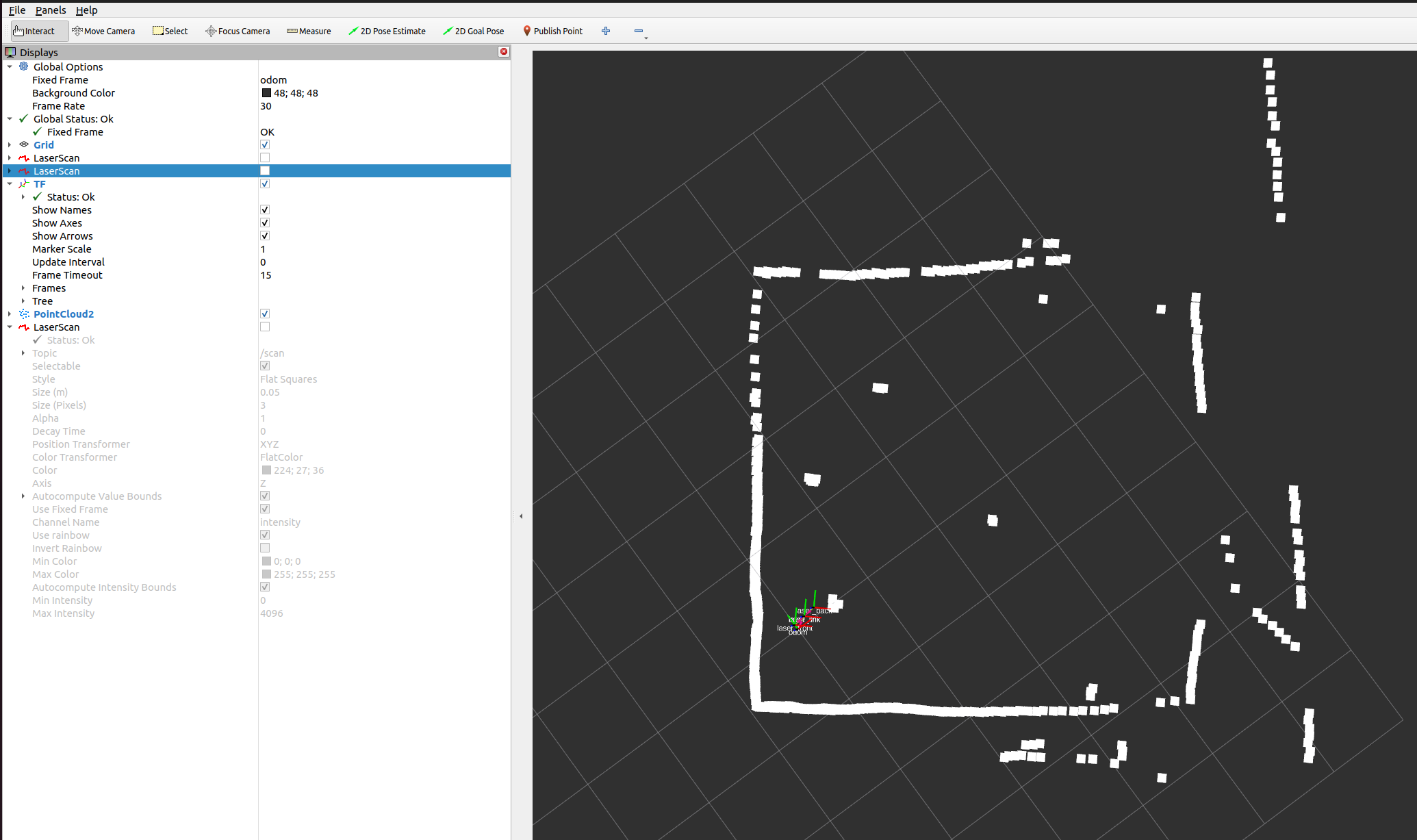
2-7 点云转雷达
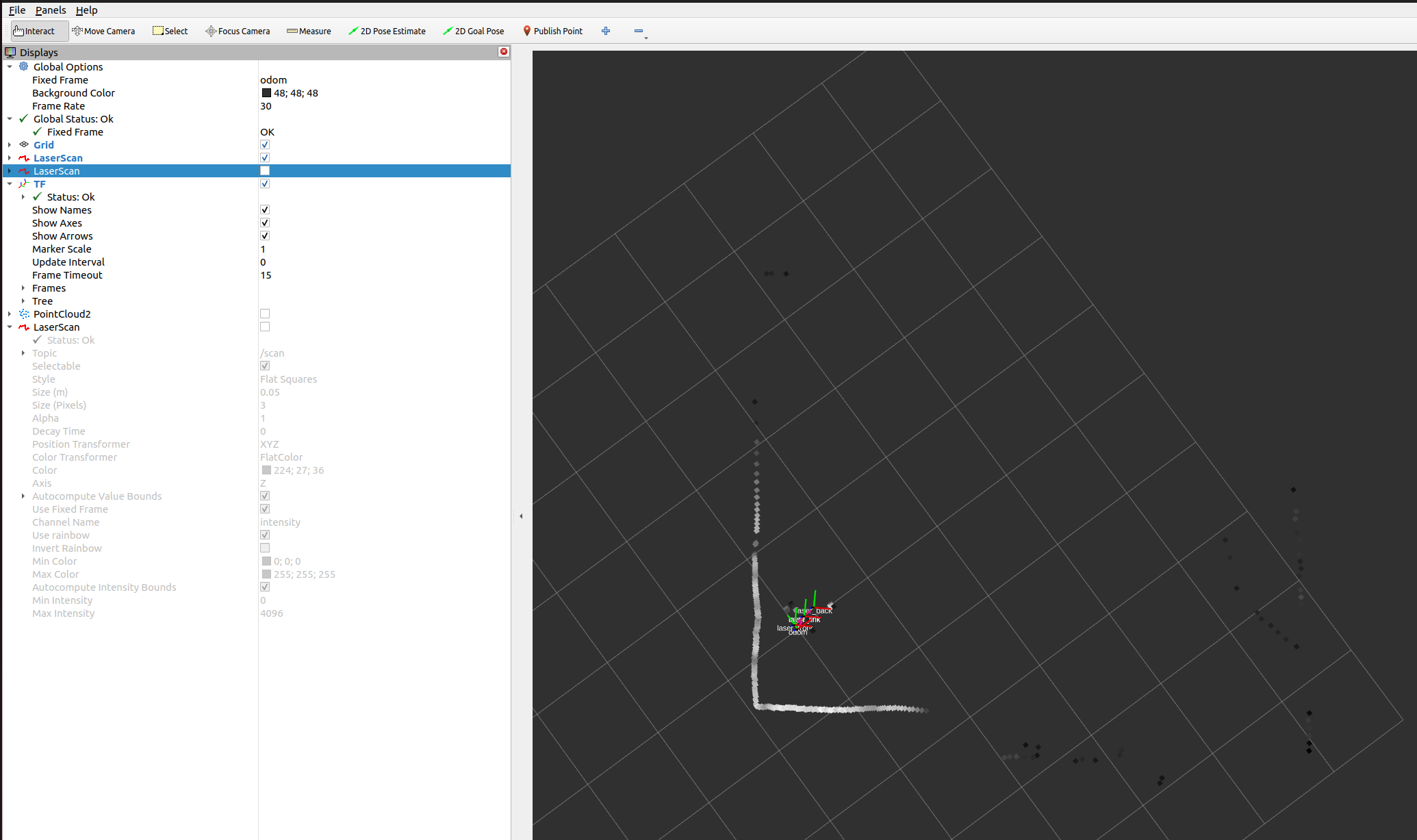
-
通过点云裁切函数,我们已经可以发布合并后的点云数据了
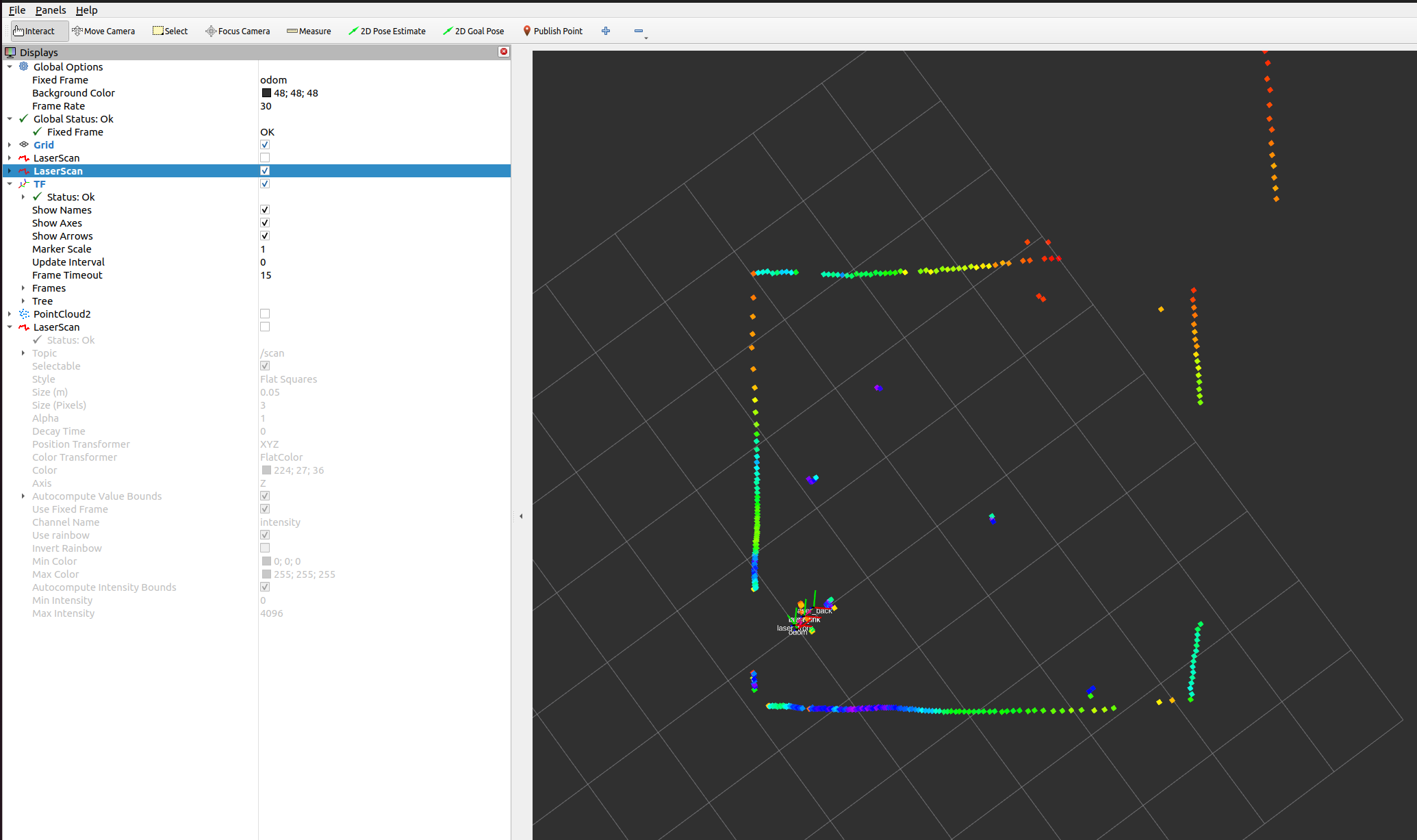
-
可以看到,两个雷达的数据被融合,切车辆中心的点云数据已经被清理(上图车辆右上角的点云是障碍物)
-
那么我们最后只需要把这个点云数据转换为雷达数据即可
-
这里提一嘴,
ROS2是有点云转雷达的库pointcloud_to_laserscan,但是这里我们直接自己实现即可
cpp
sensor_msgs::msg::LaserScan CloudToScan(
const sensor_msgs::msg::PointCloud2 &cloud_msg,
const std::string &frame_id,
float angle_min = -M_PI,
float angle_max = M_PI,
float angle_increment = 0.01f,
float range_min = 0.1f,
float range_max = 10.0f)
{
// ===== 1. 转 PCL =====
pcl::PointCloud<pcl::PointXYZ> cloud;
pcl::fromROSMsg(cloud_msg, cloud);
// ===== 2. 初始化 LaserScan =====
sensor_msgs::msg::LaserScan scan;
scan.header.frame_id = frame_id;
scan.angle_min = angle_min;
scan.angle_max = angle_max;
scan.angle_increment = angle_increment;
scan.range_min = range_min;
scan.range_max = range_max;
int size = static_cast<int>((angle_max - angle_min) / angle_increment);
scan.ranges.assign(size, std::numeric_limits<float>::infinity());
// ===== 3. 点云 → scan =====
for (const auto &p : cloud.points)
{
if (!std::isfinite(p.x) || !std::isfinite(p.y))
continue;
float range = std::sqrt(p.x * p.x + p.y * p.y);
if (range < range_min || range > range_max)
continue;
float angle = std::atan2(p.y, p.x);
int idx = static_cast<int>((angle - angle_min) / angle_increment);
if (idx >= 0 && idx < size)
{
scan.ranges[idx] = std::min(scan.ranges[idx], range);
}
}
scan.header.stamp = rclcpp::Clock().now();
return scan;
}- 这里我们进行了初始化 scan,分辨率设置,range数组初始化,点云投影回2D以及索引映射
- 核心内容是保留最近点(标准激光模拟逻辑)
cpp
scan.ranges[idx] = min(existing, range);2-8 最终效果
- 我们可以把雷达融合节点加入一开始的
launch.py,一并启动
python
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch_ros.actions import Node
import os
from ament_index_python.packages import get_package_share_directory
def generate_launch_description():
lslidar_pkg = get_package_share_directory('lslidar_driver')
fusion_pkg = get_package_share_directory('dual_lidar_fusion')
return LaunchDescription([
# ========================
# front 雷达
# ========================
IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(lslidar_pkg, 'launch', 'lsn10_launch_front.py')
)
),
# ========================
# back 雷达
# ========================
IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(lslidar_pkg, 'launch', 'lsn10_launch_back.py')
)
),
# ========================
# base_link -> laser_link (0 0 0)
# ========================
Node(
package='tf2_ros',
executable='static_transform_publisher',
arguments=[
'0', '0', '0',
'0', '0', '0',
'base_link', 'laser_link'
]
),
# ========================
# laser_link ->
# =======================
Node(
package='tf2_ros',
executable='static_transform_publisher',
arguments=[
'0.10', '0.11', '0',
'0', '0', '0',
'laser_link', 'laser_back'
]
),
# ========================
# laser_link ->
# ========================
Node(
package='tf2_ros',
executable='static_transform_publisher',
arguments=[
'-0.10', '-0.11', '0',
'0', '0', '0',
'laser_link', 'laser_front'
]
),
# ========================
# 1. 融合点云节点
# ========================
Node(
package='dual_lidar_fusion',
executable='scan_fusion_node',
name='scan_fusion_node',
output='screen'
),
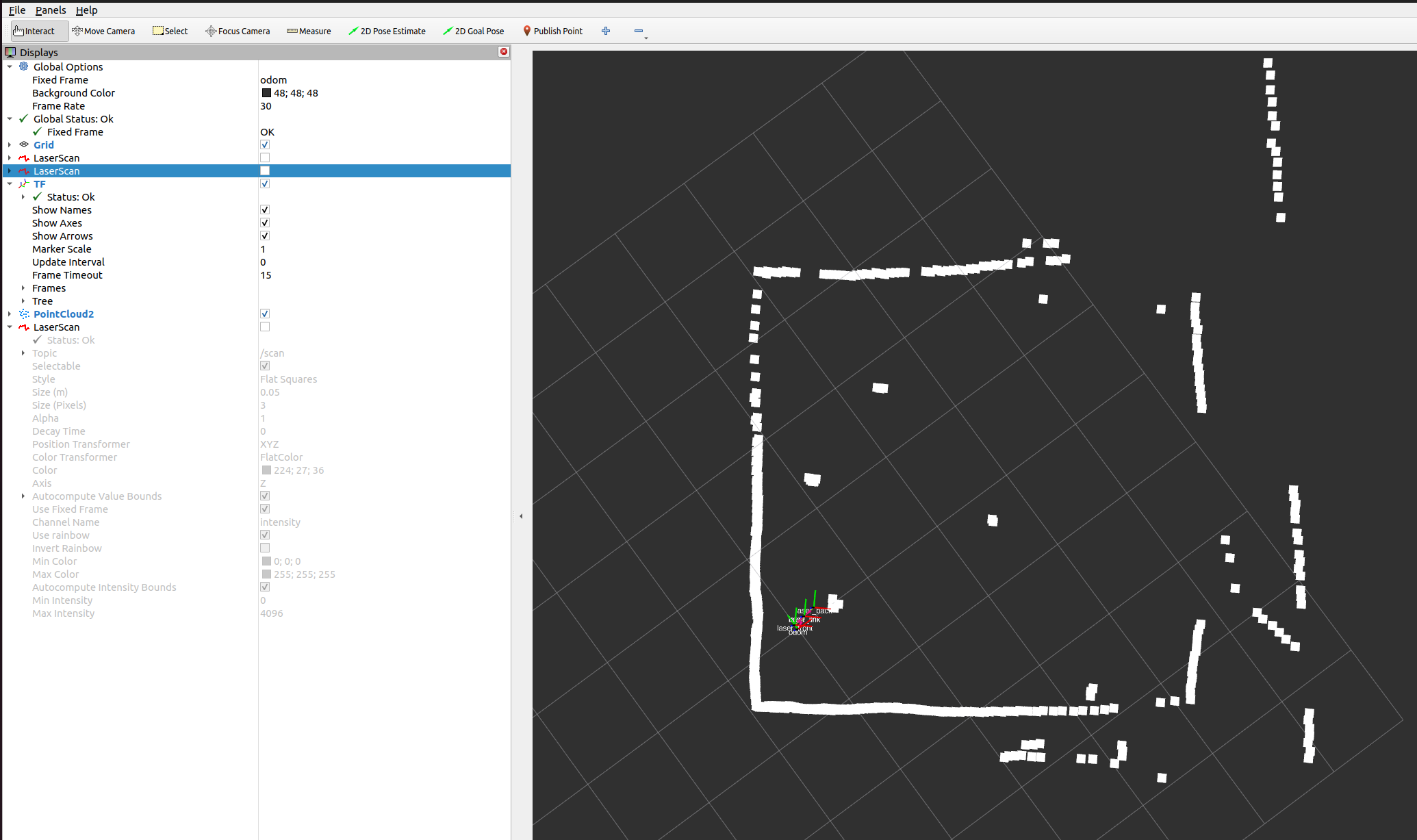
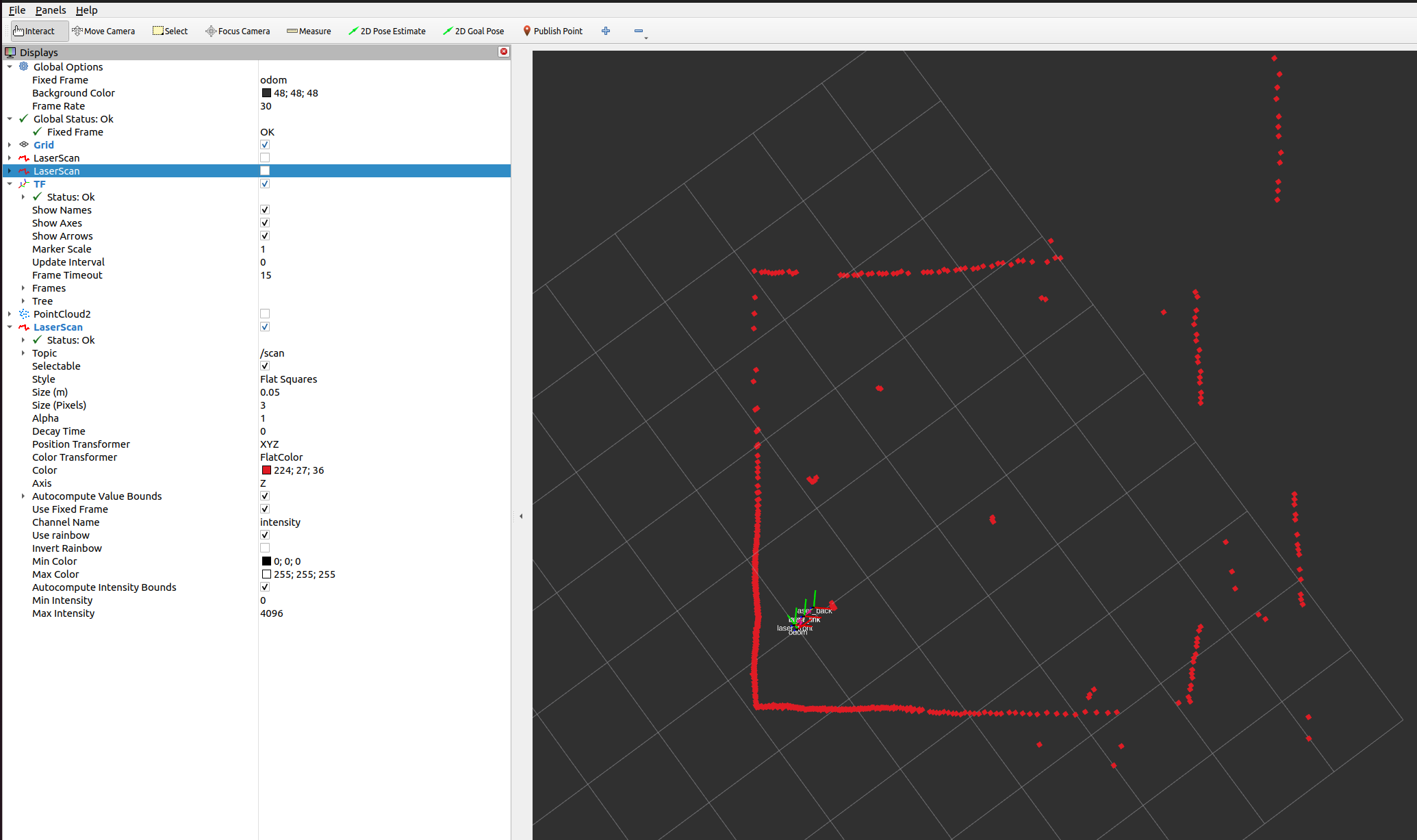
])- 可以看到,我们的雷达数据正常发布
完整效果图展示
-
机器人坐标展示
-
前雷达
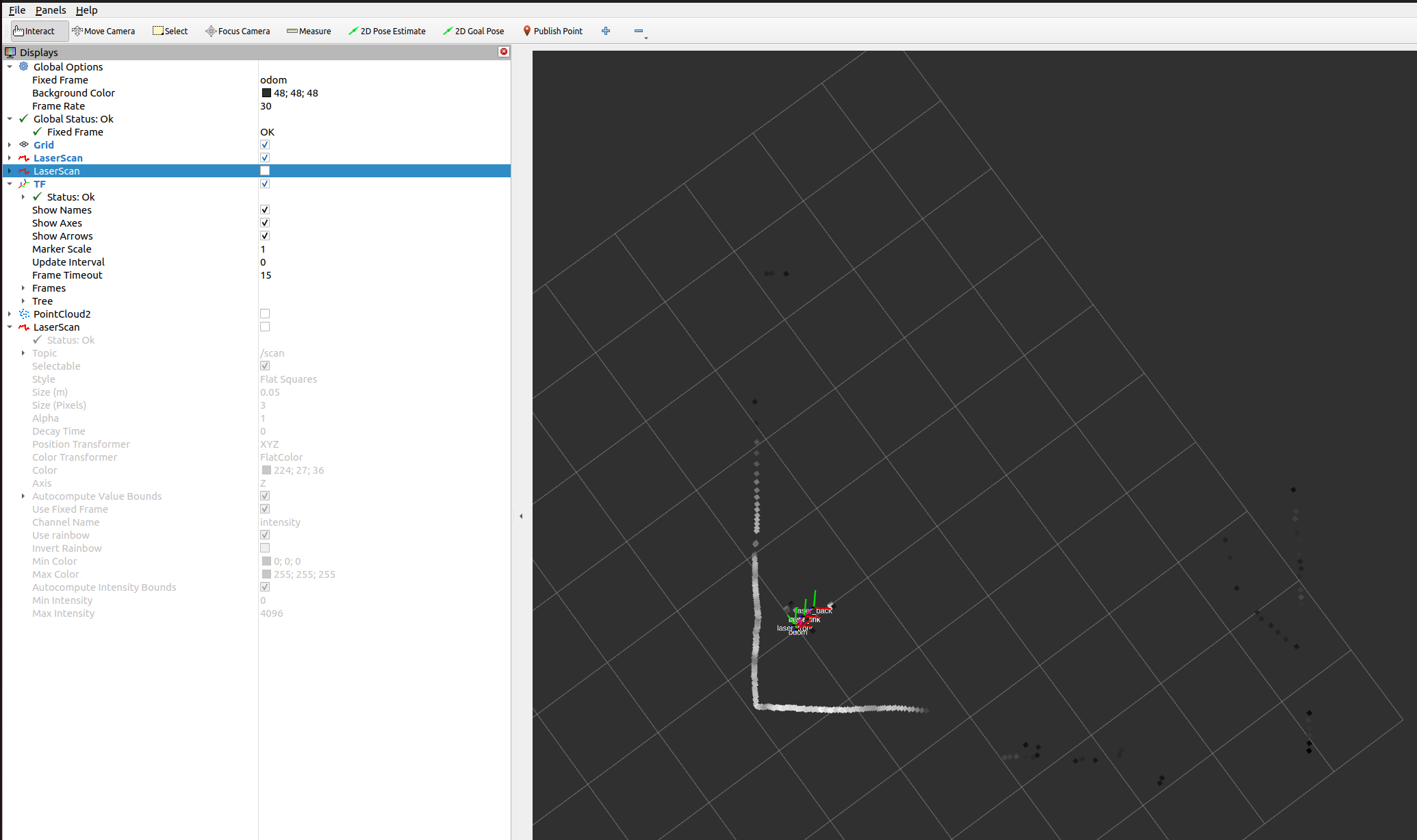
-
后雷达
-
融合后的点云
-
融合后的雷达
小结
- 本文针对带中心机械臂的麦克纳姆底盘提出了一种双2D激光雷达融合方案,通过 udev 实现设备稳定映射,结合 tf2 构建统一坐标系,并将 LaserScan 转换为 PointCloud2 后进行空间融合与ROI过滤,最终再反投影生成新的 LaserScan 数据流,从而有效解决单雷达遮挡导致的感知缺失问题,实现了稳定可靠的全局环境感知结构。
- 如有错误,欢迎支持!
- 感谢支持!