ToF(Time of Flight)
原理
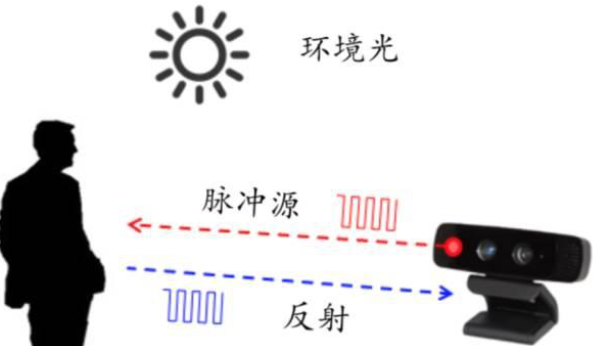
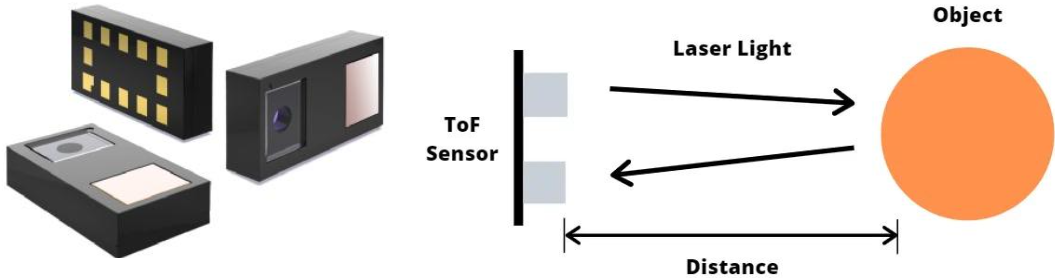
ToF全称是Time of flight(飞行时间),其实ToF是一种测距的方法,ToF相机一般需要使用特定人造光源进行测量,即通过测量超声波、微波、光等信号在发射器和反射器之间的"飞行时间"来计算出两者之间距离。
ToF传感器种类很多,使用较多的是通过红外或者激光进行测距的ToF传感器。使用ToF传感器生成和捕获包含深度信息的数据,结合图像传感器,就可以得到3D图像。
组成
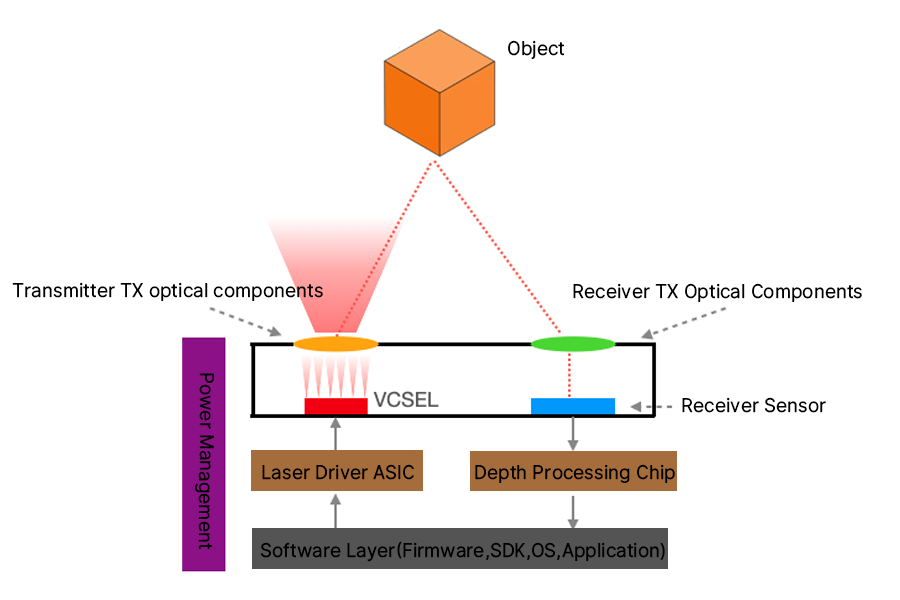
一个典型的TOF系统由以下几部分组成:
- 发射端(Tx):包括激光光源(主要是VCSEL)、激光驱动电路ASIC,以及用于光束控制的光学组件(如准直镜头或衍射光学元件)和滤光片。
- 接收端(Rx):包括接收端的镜头和滤光片;根据不同的TOF系统可能是CIS、SPAD或SiPM等传感器;以及用于处理接收器芯片大量数据的图像信号处理器(ISP)。
- 电源管理:需要稳定的电流控制VCSEL、高电压供给SPAD等,因此需要强大的电源管理。
- 软件层:包括固件、SDK、操作系统和应用层。
分类:dTOF、iTOF
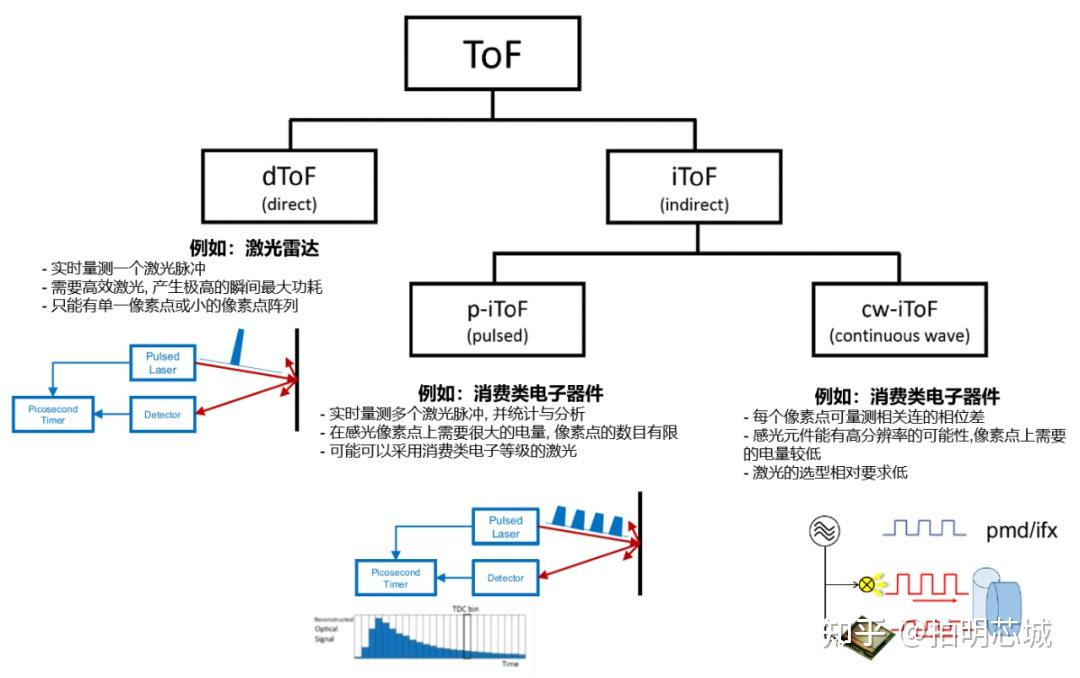
ToF传感器按技术原理可分为:
- 直接TOF(dTOF)
- 间接TOF(iTOF)
尽管TOF的原理看似简单:发射光脉冲并检测其返回以计算距离。其复杂性在于区分返回的光和环境光。一般通过发射足够亮的光以实现高信噪比,并选择适当的波长以最小化环境光干扰来解决。另一种方法涉及对发射的光进行编码,使其在返回时可以识别,类似于手电筒的SOS信号。
dTOF
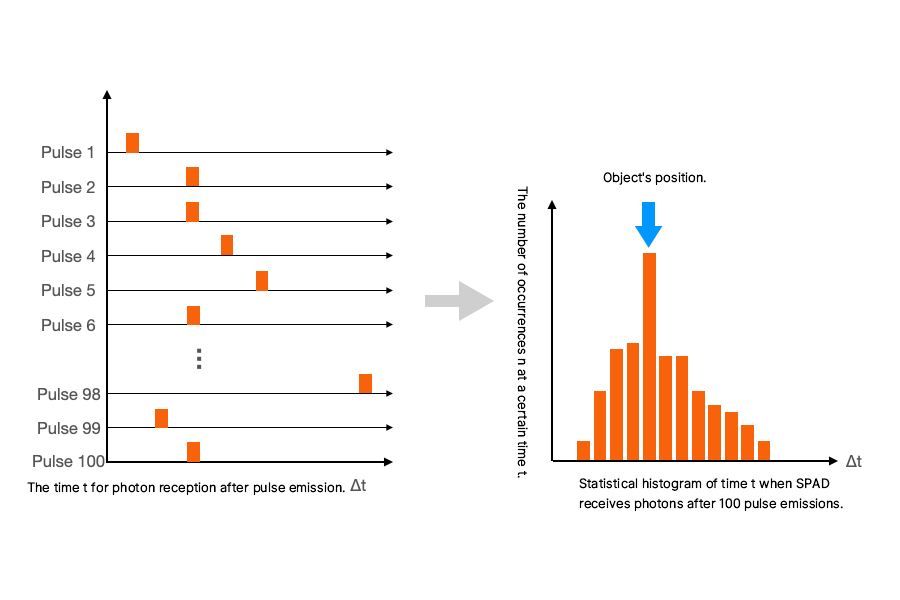
直接TOF直接测量光子的飞行时间。其关键组件,单光子雪崩二极管(SPAD),灵敏度足以检测单个光子。dTOF采用时间相关单光子计数(TCSPC)来测量光子到达的时间,并构建直方图以推断出基于特定时间差频率最高的最可能距离。
iTOF
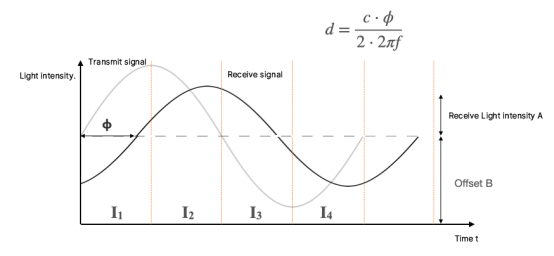
间接TOF根据发射和接收波形之间的相位差来计算飞行时间,通常使用连续波或脉冲调制信号。iTOF可以使用标准的图像传感器架构,测量随时间变化的光强度。
iTOF进一步细分为连续波调制(CW-iTOF)和脉冲调制(Pulsed-iTOF)。CW-iTOF测量发射和接收的正弦波之间的相位偏移,而Pulsed-iTOF使用方波信号计算相位偏移。
对比
dToF技术在激光功耗、抗干扰、远距离精度等方面有着明显优势,是远距离应用的绝佳候选,但对芯片设计、系统设计、制造工艺要求较高。
iToF在芯片工艺和产业链已趋于成熟,但效果并不完美,其精度会受测量距离影响,距离限制在5米以内,从而导致其应用体验不佳。
ToF传感器通常是正弦波或方波。方波调制更常见,因为它可以很容易地用数字电路实现。调制可以通过对反射光的光电子积分或者在第一次检测到反射时启动快速计数器来实现。后者需要一个快速的光电探测器,通常是一个单光子雪崩二极管(SPAD)。这种计数方法需要快速的电子设备,因为要达到1毫米的精度需要对持续时间为6.6皮秒的脉冲进行计时。
供应商及型号
博通
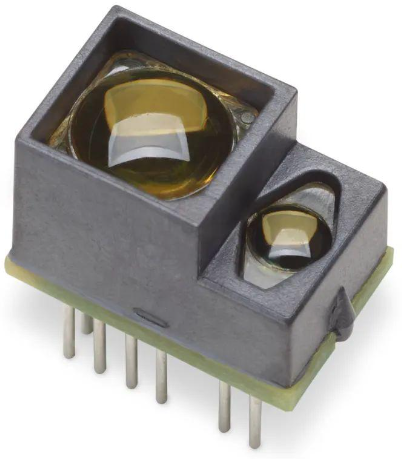
博通的ToF传感器AFBR-S50采用测量相位偏移差来间接测量光的飞行时间。核心部件包括850nm的激光器和APD阵列。内部集成的激光器采有人眼安全的Classs 1等级。这款产品可以测量最远30米的中等距离,并具有12.4°x6.2°的视场(FoV),分辨率为32像素。这款光学飞行时间传感器集成了850nm的激光光源,根据被测物体的距离,它可以发射一个2°x2°的光束,照亮1到3个像素。其应用包括距离测量和安全监控,其中3D图像传感更准确,可以更容易地识别人或物体。在物流、机器人和工厂自动化方面,它能够安全地识别环境以及人机界面。
瑷镨瑞思
瑷镨瑞思的8x8像素3D TOF传感器芯片epc611,是原单像素epc600和8 x 8像素epc610的产品的升级版。在上一代epc600/610产品基础上,采集速度提高了10倍,精度提高了5倍,并且具有更好线性度和一致性。epc611采用与大面阵ToF传感器芯片(160 x 60像素epc635和320 x 240像素epc660)相同的架构设计,具有同样的强大功能。可应用于扫地机器人、工业自动化物体检测、无人机定高及避障、手势识别(人机交互)、汽车内人体坐姿检测、门安全防护等应用。的8x8像素3D TOF传感器芯片epc611,是原单像素epc600和8 x 8像素epc610的产品的升级版。在上一代epc600/610产品基础上,采集速度提高了10倍,精度提高了5倍,并且具有更好线性度和一致性。epc611采用与大面阵ToF传感器芯片(160 x 60像素epc635和320 x 240像素epc660)相同的架构设计,具有同样的强大功能。可应用于扫地机器人、工业自动化物体检测、无人机定高及避障、手势识别(人机交互)、汽车内人体坐姿检测、门安全防护等应用。
ST
传感器VL53L4ED,工作温度范围扩展至-40°C至105°C,在一个使用方便的一体化模块中集成激光器和单光子雪崩二极管(SPAD)阵列,即使在极端温度条件下也能提供可靠的测量数据。

英飞凌
英飞凌与pmdtechnologies合作推出的REAL3™图像传感器系列,系列型号有IRS2877C、IRS2877A、IRS2975C、IRS2976C、IRS2381C等,IRS2976C图像传感器可支持640x480的系统VGA分辨率。该图像传感器凭借世界排行前列的小巧外形尺寸------23mm²,可轻松兼容之前的IRS2877C图像传感器,并且能非常方便地升级。
索尼
索尼的堆叠式单光子雪崩二极管(SPAD)深度传感器IMX459,将仅为10平方微米的SPAD像素阵列和测距处理电路封装在一颗芯片上,实现了紧凑的1/2.9型外形尺寸,实现了约10万有效像素的高分辨率,可提供高精度的高速测距能力。可应用于基于直接飞行时间(dToF)方案的汽车激光雷达(LiDAR)。
三星
三星的间接飞行时间(iToF)传感器ISOCELL Vizion 63D,仅有3.5㎛像素大小,在1/6.4"光学格式内达到视频图形阵列(VGA)级别分辨率(640x480),灵活适配于各类便携式设备。ISOCELL Vizion 63D支持泛光(短距离高分辨率)和聚光(长距离)照明模式,将可测距离范围从5米提升至10米。
TI
德州仪器的一款ToF传感器OPT8241就特别针对3D成像和深度感知应用设计,这款传感器利用飞行时间(ToF)原理,通过发射光脉冲并测量其往返时间来计算与物体间的距离实现精确测距。该器件将 ToF 感应功能与经优化设计的模数转换器和通用可编程定时发生器相结合,以高达150帧/秒的帧速率(600 读出/秒)提供四分之一的视频图形阵列 (QVGA 320 x 240) 分辨率数据。
艾迈斯欧司朗
艾迈斯欧司朗的1D ToF传感器TMF8801,采用2.2mmx3.6mmx1.0mm封装,集成了 VCSEL 红外发射器、多个 SPAD(单光子雪崩光电二极管)光探测器、时间-数字转换器和直方图处理内核。设备在芯片上实现基于直方图的全占位监测、距离测量和接近传感算法。支持实现摄像头的激光检测自动对焦,可以解决2cm到2.5m的距离内的识别问题,精确度达到5%,跟业界相比尺寸降低了30%左右。
滨松
滨松的近红外增强型飞行时间(ToF)图像传感器S15743-01WT,采用紧凑的晶圆级封装(WLP)技术,其中的光电二极管阵列为144x10像素,但是有效像素数为128x8,像素间距为20μm (H)、146.5μm (V),像素高度为50μm。此外,该传感器还集成了定时发生器、采样&保持电路、水平移位寄存器、垂直移位寄存器、偏置发生器电路等。S15743-01WT光谱响应范围为500nm至1100nm,在近红外光谱区具有高灵敏度,峰值灵敏度波长为800nm,视频数据传输速度为10MHz。S15743-01WT应用范围包括运动捕捉和检测,智能机器人/自动驾驶中物体的检测,物流领域的形状识别和安防领域的入侵检测等。
ADI
亚德诺的ADSD3100是一款基于CMOS 3D ToF的3D深度和2D可视光成像器,可用于集成到3D传感器系统中。读出所需的功能模块包括模数转换器(ADC)、像素偏置电路和传感器控制逻辑,内置在芯片中以便在系统中实现简单、经济高效的方案。ADSD3100通过移动行业处理器接口(MIPI)、摄像头串行接口2(CSI-2)接口与主机系统进行电气接口。为了完成工作子系统,需要用于成像器的镜头和光学带通滤波器,以及红外光源和相关驱动器。ADSD3100可应用于智能手机、AR/VR、机器视觉系统(物流和库存)、机器人(消费电子和工业)等领域。
TDK
TDK的ICU-10201和ICU-20201是高性能超声波飞行时间(ToF)传感器,在微型3.5x3.5mm2 可回流焊封装中集成了PMUT(压电微机械超声换能器)和超低功耗SoC。该传感器内嵌有更强大的片上处理器,具有更强的计算能力,其增强的处理能力使得广泛的应用算法可通过芯片直接运行,完全无需再为系统 MCU增加额外负荷。可用于短距和长距检测。
特励达易图威
特励达易图威的Hydra3D+是一款832 x 600像素分辨率的飞行时间(ToF)CMOS图像传感器,采用Teledyne e2v的专有CMOS技术设计,具有全新的10 μm three-tap 像素,传输速度飞快(最快10ns),在 NIR 波长下显示出高灵敏度,以及出色的解调对比度。这种精确的功能组合使该传感器能实时工作而不产生运动伪影(即使场景中有快速移动的物体),并在段工作距离且具备出色的时域噪声,此特性对于拾放、物流、工厂自动化和工厂安全等应用至关重要。创新性的片上多系统管理功能使其可应用于多个有源系统,不会受到干扰,因此不会错误测量。专为多功能三维检测和测量设计。
凸版/Brookman
凸版/Brookman的BT008D是一款基于短脉冲调制(SPM)间接飞行时间(iToF)传感技术的CMOS ToF深度图像传感器。其大约80000个有效像素测量点有利于快速后处理。Brookman创新的多抽头全局快门像素结构和针对SPM iToF优化的像素运行,可以实现高速、高信噪比的深度传感,同时无动态运动缺陷。此外,该传感器还集成了片上12位高速模数转换器,从而实现了低时间噪声的快速读出。该传感器支持MIPI CIS-2和CCI传感器接口。可满足科学实验、智能交通系统、室内监控、可穿戴设备等多领域的应用需求。
光程研创
光程研创基于GeSi(锗硅基)光子创新的宽光谱3D ToF(飞行时间)传感器"探索"系列,该3D飞行时间传感器工作可在较长的近红外波段(NIR)下运行,可用于比目前使用的940nm波长安全10倍以上的光谱区域,并可提高在阳光下的传感精度和性能。其目标应用将受益于改进的3D传感性能,如移动设备、汽车激光雷达和机器视觉。
新唐
新唐的3D ToF传感器,基于2D图像传感器之技术,内置距离计算电路,能够做到对每一个像素进行测距,不论室内外,强烈日光,相机和拍摄对象间的动态,远距离(~18m)皆可测距辨识,适用于车载和工业。新唐的ToF传感器源自对松下半导体业务的收购。
安森美
安森美的RB系列SiPM可在低偏置电压下实现单光子灵敏度、高响应度和快速信号响应。该系列光电传感器采用紧凑而坚固的模塑引线框架封装(MLP),适用于回流焊工艺。RB系列SiPM及其封装均针对规模生产而设计,以卷带形式交付。RB系列SiPM的主要应用为采用905nm波长的激光雷达和测距应用。相比雪崩光电二极管(APD)和PIN二极管,该系列SiPM传感器改善了高增益和单光子灵敏度。对于激光雷达(LiDAR)应用,这些特性可使LiDAR系统实现低反射率物体的远距离探测。
芯视界
芯视界的单光子探测技术的3D ToF深度传感器---VI4331,该传感器分辨率高达240×96,支持水平120度广视场角,拥有30fps高帧率,VI4331搭载高速MIPI接口, 可支持30fps的深度影像信息输出。同时拥有全直方图输出功能, 满足客户多样的场景应用需求。VI4331感光阵列支持一维单向扫描, 芯片搭载4组激光驱动信号,每一组可对应1/4 影像阵列的激光驱动信号。激光驱动信号可与内部传感器扫描时间同步,搭配寻址式激光器,能完美实现固态扫描方案。适用于扫地机室内建模与避障、行为检测、安检监控等。
聚芯微
聚芯微的高性能飞行时间(ToF)3D图像传感器SIF2610。该产品集成了一个像素尺寸5um,分辨率VGA (640x480)级别的感光阵列,背照式BSI(Backside-illumination)像素结构,同时,借助于和全球顶级晶圆厂的深度合作,聚芯微电子进一步提高了像素的QE(量子效率),相较于传统的ToF传感器,SIF2610在940nm波段的QE提升了3.5倍,这将为ToF传感器带来更高的灵敏度,从而进一步提升测量精度并降低系统功耗。该产品延续了聚芯微电子在ToF技术上的深厚积累,相较于其第一代ToF产品,SIF2610在分辨率、测量精度、抗环境光干扰、功耗等关键指标上有了显著提升。同时,借助SIF2610丰富的功能,其可以灵活的应用于智能手机、IoT、机器视觉、自动驾驶等多个领域。
光微科技
光微科技ToF芯片基于自研ToF(Time of Flight)核心技术,涵盖I-ToF和D-ToF两个方向,提供多款线阵和面阵等产品。NP2F3202是一款分辨率为QVGA(320x240)的相位式ToF深度传感器芯片,具有精度高、功耗低等特性。芯片内部集成了温度传感器、调制光源信号发生器、ADC、高速时钟、MIPI接口等模块,并采用全局曝光、支持高调制频率、高帧率以及多频率多积分时间的工作方式,具有精度高、功耗低、片上集成温度补偿功能等特性,可应用于3D人脸识别、机器视觉、工业领域、机器人等场景;NP2F2401是一款分辨率为HQVGA(240x180)的相位式ToF深度传感器芯片,具有精度高、功耗低等特性,芯片内部集成了温度传感器、调制光源信号发生器、ADC、高速时钟、MIPI接口等,并采用全局曝光、支持高调制频率、高帧率以及多频率多积分时间的工作方式,可应用于手机、平板、智能家居、AR/VR等场景;NP2F1201是一款分辨率为120x90的相位式ToF深度传感器,具有精度高、功耗低和温度补偿功能等特性。芯片采用全局曝光、支持高帧率及多频率工作方式,适用于手机、平板、投影仪、手势识别、智能家居等场景。
炬佑智能
炬佑智能的OPN8018基于新一代Pulse Hybrid ToF像素设计, 兼具间接式ToF的高集成度、脉冲式ToF的高精度和快速响应,以及直接式ToF的低功耗、抗干扰能力强的优点。640×480的精细分辨率配合0.5%的精度水准, OPN8018将在智能手机、 Face ID、3D建模等高精度高清3D应用领域大展身手。
灵明光子
灵明光子的一款高精度、低功耗的dToF(Direct Time of Flight,直接飞行时间)深度传感芯片ADS6401,采用了先进的3D堆叠技术,具有感光区尺寸为1/6.76,对角线长度为2.6mm,有效像素达到210x160共33600个SPAD像素,像素尺寸为10um。它支持灰度图和深度图两种方式输出,PDE@940nm为14~20%,测距范围支持0-19m。此外,该芯片还具备高效的多区控制和多区数据直出能力,可以利用4分区实现120/240 FPS的超高子画幅帧率,为高速影像和AR交互提供支持。 将背照式(BSI)的SPAD传感芯片晶圆和数字逻辑电路晶圆以Cu-Cu混合金属键合技术进行堆叠,从而实现了从光传感到电传输再到数字电路处理的高效直通。这种设计不仅减小了芯片的整体面积,还使得传感芯片和逻辑电路可以分别采用最优制程,大幅降低了芯片的功耗。该芯片可广泛应用于智能手机、MR/AR眼镜、智能摄像头、笔记本电脑、平板电脑、专用设备、扫地机器人、无人机等行业的实时三维测距及建模类应用。
印芯半导体
3D dToF领域,印芯半导体与芯片制造领域的顶级晶圆厂深度合作成功流片做出DEMO,并将三维识别的精度从传统iTof的厘米级提升到毫米级别,将TOF系统的功耗大幅度降低90%左右,芯片面积和成本降低40%以上,分辨率从传统iTOF的30万像素提高到140万像素,多项技术指标处于国际领先地位。该产品定位于机器视觉识别解决方案,可应用于智能手机、AR/VR设备、机器人、无人机、自动驾驶、安防设备等终端领域。
迈来芯
迈来芯采用IRBP滤波器的MLX75026具有QVGA(320×240像素)分辨率和1/4英寸光学格式,并支持940 nm照明。此外,该产品采用I2C接口进行配置,并提供CSI-2串行数据输出。凭借高度集成、尺寸很小且功耗较低的传感器,以及集成红外带通滤波器,工程师可以打造出紧凑且具有成本效益的ToF摄像头,广泛应用于汽车、工业和消费类领域。
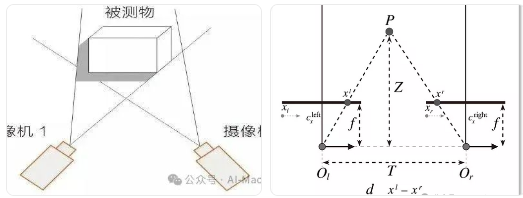
双目(Stereo)
被动三角测距,成本低、室外强、精度随距离下降,适合自动驾驶、室外导航。
原理:模拟人眼,双相机同步成像→匹配对应点→视差→三角测距。
光源:自然光(被动),无发射模组。
精度:近距(1m 内)0.1--1mm;中距 1--5cm;远距分米级。
范围:0.3--25m(随基线增大而变远)。
特点:精度随距离平方衰减;基线越大体积越大。
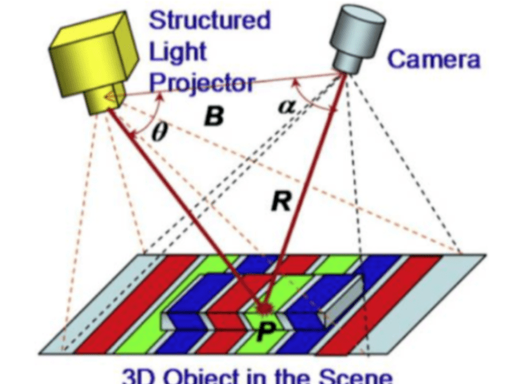
结构光(Structured Light)
主动投射编码图案,近距离精度最高(毫米级)、分辨率高,适合手机人脸、高精度扫描。
原理:投射编码红外图案(散斑 / 条纹)→拍摄形变图案→三角测距。
光源:红外发射器(主动)。
精度:近距(0.5--3m)最高,0.01--1mm(毫米级);>5m 后快速下降。
范围:0.1--10m,最佳 0.5--3m。
特点:近距离精度王者;分辨率高(可达 1280×1024)。
对比
环境适应性(光照 / 纹理 / 遮挡)
| 维度 | 双目 | 结构光 | ToF |
|---|---|---|---|
| 强光(室外) | 最好(被动光) | 差(易被淹没) | 一般(需滤光) |
| 暗光/黑夜 | 差(无纹理) | 好(主动红外) | 好(主动红外) |
| 无纹理表面(白墙) | 匹配失败 | 主动补纹理 | 不受影响 |
| 重复纹理(网格) | 易误匹配 | 编码图案抗干扰 | 不受影响 |
| 多径反射(玻璃/镜面) | 较好 | 易畸变 | 易重影 |
- 双目:室外王者,室内弱纹理不行。
- 结构光:室内近距离最强,室外几乎不可用。
- ToF:室内外通用,中远距离最佳,弱纹理友好。
功耗、算力与成本
双目
- 功耗:低(仅双相机)。
- 算力:高(需立体匹配,GPU/NPU依赖)。
- 成本:最低(普通CMOS即可)。
- 体积:较大(基线限制,难以小型化)。
结构光
- 功耗:中(红外投射+相机)。
- 算力:中(单帧解码,无需密集匹配)。
- 成本:中高(高精度投射模组+IR相机)。
- 体积:小(可集成手机,如Face ID)。
ToF
- 功耗:高(高频红外调制+高速传感器)。
- 算力:低(直接测时间差,算法简单)。
- 成本:高(纳秒级计时芯片+调制发射器)。
- 体积:小(模组化,手机/AR常用)。
典型应用场景
双目
- 自动驾驶(无人机/车)、室外机器人导航、三维重建(室外大场景)、工业检测(户外)。
- 代表:ZED相机、大疆无人机避障、自动驾驶双目系统。
结构光
- 手机3D人脸解锁(Face ID)、AR/VR手势追踪、室内高精度3D扫描、工业精密测量(零件/装配)。
- 代表:iPhone Face ID、Intel RealSense SR300、奥比中光结构光相机。
ToF
- 手机后置景深/AR、AR/VR空间定位、中远距离动态手势、仓储物流(体积测量)、自动驾驶辅助(中距)。
- 代表:iPhone 15 Pro Max ToF、微软Azure Kinect、华为AR ToF模组。
选型速记(按需求)
- ✅ 近距离(<3m)+ 高精度(毫米级)+ 室内 → 结构光
- ✅ 中远距离(5--50m)+ 高帧率 + 动态场景 → ToF
- ✅ 室外强光 + 低成本 + 中低精度 → 双目