TOF(Time of Flight)飞行时间测距的基本原理
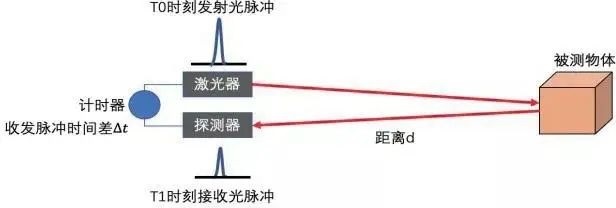
TOF 是一种通过测量光信号从发射端往返目标物体的时间来计算距离的技术。如下图所示,激光器(Emitter)发射一束光,打到物体上被反射回来,探测器(Sensor)感应到后,测算飞行时间,那么:
- 距离 = 飞行时间 / 2 * 光速
TOF 分为两种类型:
- 直接 TOF(dToF):发射特定波长的光束,例如940nm(纳米), 接收时过滤其它波长的光。
- 间接 TOF(iToF):把光调制为脉冲形式,计算反射回来的光波的相位差,计算时间。
重要概念
-
FoV(Field of View) 视场
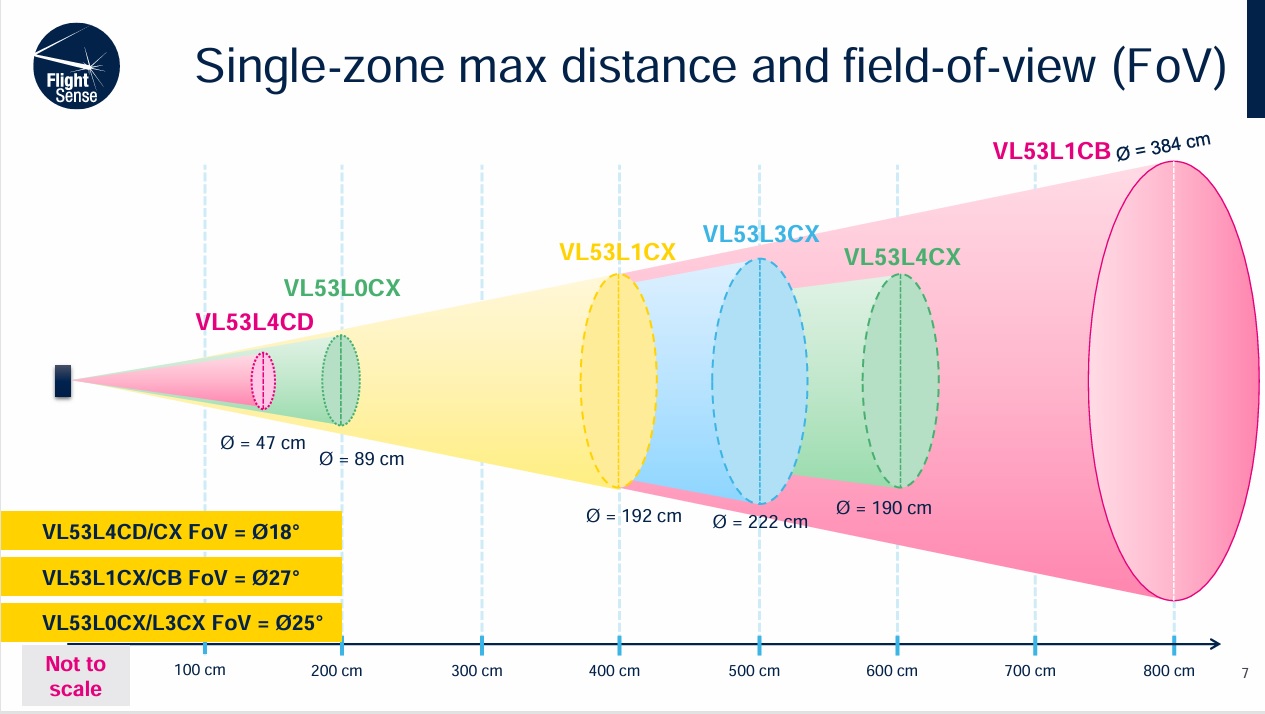
FoV在TOF中是一个重要的参数,在用户的角度看,一个简单的表达就是一个圆锥状的用于激光计算的角度。例如下图,是ST公司不同TOF芯片支持最大测量距离和FoV角度。通常的理解是,同一个芯片,检测对象越远,面积越大。同样面积的对象,离得最近,反射回来的信号最强。所以FOV和检测距离不是越大越好,还是看应用场景的。
在技术层面,FoV由发射端(emitter (VCSEL))和接收端(receiver (SPAD))组成,各自都有各自特性。
-
VCSEL: vertical cavity surface emitting laser,垂直腔面发射激光器。
-
SPAD: single photon avalanche diode, 单光子雪崩二极管。具有极高的灵敏度的光电探测器,能够探测单个光子,同时提供亚纳秒级的精确计时信息。
-
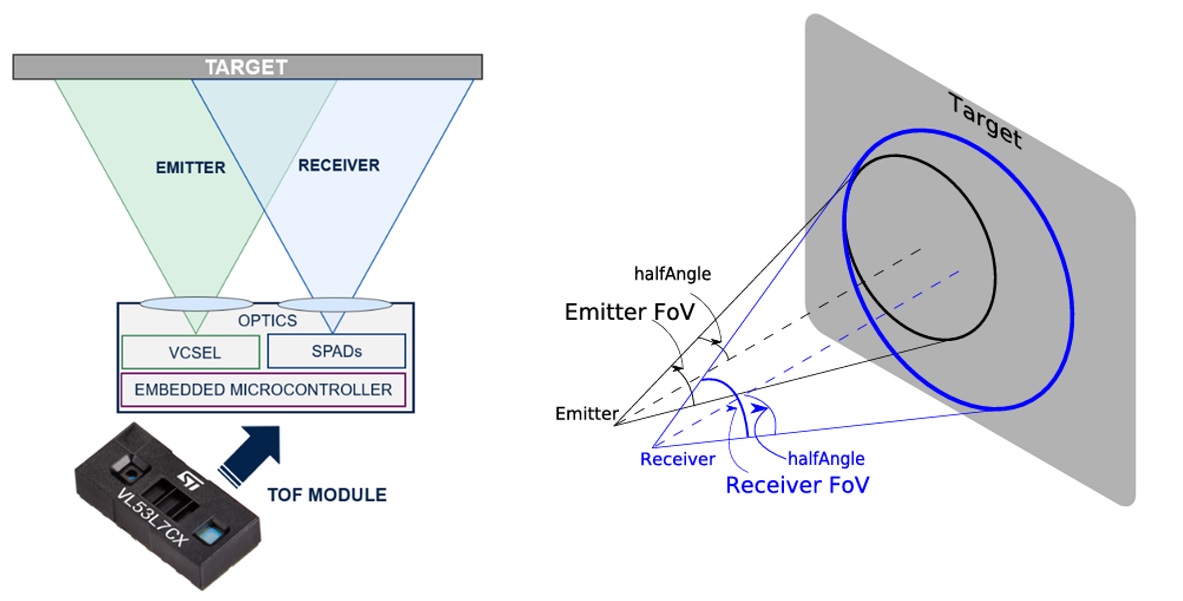
上图的左右两部分都表达同一个意思,用户角度的FoV就是发射端和接收端的交集。
-
波长(λ,单位:nm)
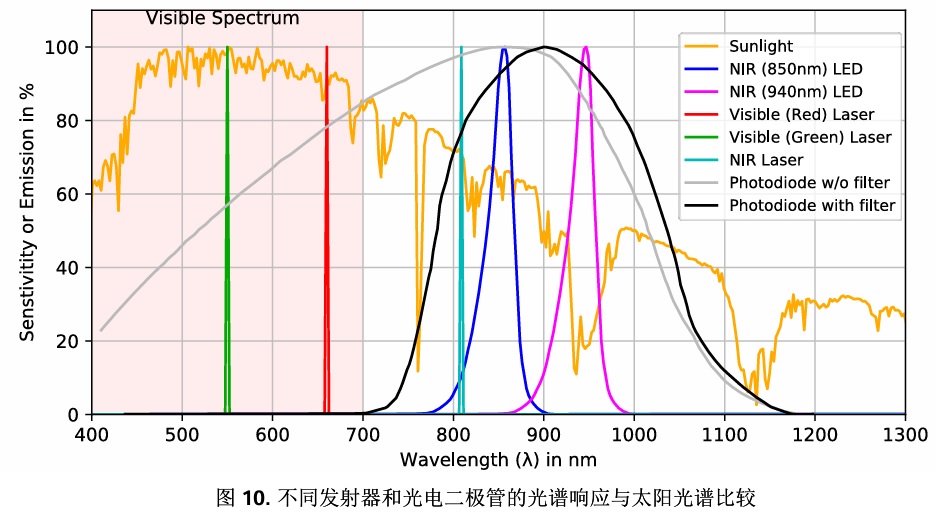
光电二极管能响应宽泛的波长带宽(光谱带宽),但其敏感度只有在特定波长下才会达到峰值。
可见光 *的场景下,人眼响应在500nm至550nm左右达到峰值,因此绿色似乎是这些应用的不二之选,但光电二极管组件的响应通常在800nm左右达到峰值,因此对绿色的响应性较差。为了进行平衡,红色(约650nm)在人眼可见性与系统性能之间达到了良好折中,因而被广泛应用。
不可见光谱 ,基于ToF的系统中,NIR统一指750nm至1400nm 范围内的波长。由于NIR波长非常接近可见光范围,例如850nm 左右的发射器,在足够黑暗的环境下仍然肉眼可见,为避免干扰用户,增大波长会更好。为什么是940nm,因为在940nm波长处阳光光谱自然出现下降,如下图黄色线(Sunlight)所示。方便滤波和节约性能。
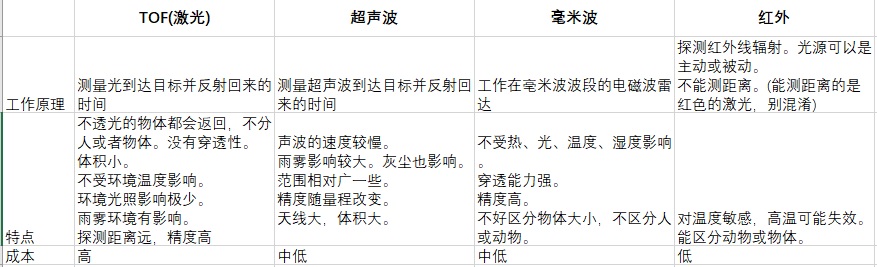
TOF与红外、超声雷达、毫米波雷达的区别
- TOF: 适合小范围高精度测距,受环境影响较小,高端可以做3D扫描,手势、人脸识别。
- 超声波雷达: 适合较大范围测距和感应,例如倒车雷达,车位感应。
- 毫米波雷达: 适合较大范围高精度测距,不受环境影响。汽车和人体感应应用多。
- 红外: 适合人体感应类应用,不适合高温的环境。
TOF做的产品
我们做了一个TOF传感器,能快速获取距离,信号强度,环境光信息。通过微信小程序配置,可以实现感应开关功能,如下:


(End)