一、系统简介
导航手术具身机器人测试系统以激光跟踪仪、6D姿态测量工装、定制化工装为核心,实现了对医疗手术机器人运动过程中的六维位姿精度的测量。系统完全满足YY/T 1712-2021《采用机器人技术的辅助手术设备和辅助手术系统》、YY/T 1901-2023 《采用机器人技术的骨科手术导航设备要求及试验方法》标准。
包括位姿准确度和重复性检测、多方向位姿准确度变动、距离准确度和重复性、位置稳定时间和超调量、位姿漂移特征、互换性、轨迹准确度和重复性、重定向轨迹准确度、拐角偏差、轨迹速度特征、最小定位时间等项目。
导航手术具身机器人测试系统采用激光非接触测量作为测量手段,实现了对骨科手术机器人运动过程中的位置等参数的测量和计算。系统主要包括激光跟踪仪和分析软件。激光跟踪仪用于静态和动态数据的采集,具有精度高、速度快、测量范围大和便携性好等特点,搭配姿态测量模块能够进行3D和6D的测量。导航手术具身机器人测试系统精度可以达到 15μm+6μm/m。jue对干涉仪距离:0.2μ/m;动态锁定精度:10μm。

导航手术具身机器人测试系统
导航手术具身机器人测试系统发射激光并锁定至固定在机器人末端执行器上的靶球(或靶标)中心,当机器人在其运动范围内移动时,跟踪仪实时记录靶球的空间坐标,以1000点/秒的超高采样率连续采集轨迹数据,反馈至PC端软件进行分析评估。通过将机器人真实运动位置与理论位置相比较,即可得到运动偏差,进而进行精度补偿。实现对机器人位姿参数、轨迹、误差和精度等的仪器。系统也用于研发过程中在不改变机器人硬件的情况下对机器人的性能进行校正和提高。还可以作为一种通用的现场坐标测量设备,对各种大型高精度、超高精度机械件进行尺寸和行为公差的检测。
系统本质是一种球坐标测量系统。由 He-Ne 激光器发出的激光经可沿水平轴和垂直轴旋转的双轴跟踪镜反射至目标,处于反射镜中心的入射光则沿原路返回。两个马达分别驱动双轴跟踪镜沿水平轴和垂直轴转动,使激光始终入射至反射器,马达驱动信号由位置检测器PSD给出,它将入射光与出射光之间的相位偏移转换成驱动电信号,实现跟踪仪自动跟踪。其基本原理是测量目标点的距离及水平和垂直方向的偏转角,距离分量由激光测量,角度分量由高精度角度编码器测量。它通过跟踪仪上α、β角配合激光束d对测量目标的跟踪运动,构成一个球坐标的测量体系,从而能够完成空间几何元素测点信息的获取,并通过测量软件完成对空间几何元素尺寸、尺寸公差与形位公差、空间曲面曲线的分析计算工作。
二、关键技术介绍
1、zui先进的激光跟踪仪:ROBO-1300 导航手术具身机器人测试系统是世界上唯一经过验证的"户外"使用跟踪仪!IP54(IEC60529)独立验证,防尘防水;
2、最智能的目标锁定:Power Lock 技术(10°FOV),快速完成断光续接,具有穿越障碍及异地自动接光功能,主机能够完成自动搜索、识别、锁定移动中的靶标位置;
3、zui高精度测量反射镜:世界上精度最高的测量反射镜:光学中心: < ± 0.003 mm (< ± 0.00012 in),Roundness (ball): ≤ 0.003 mm (≤ 0.00012 in);
4、精度高测量:超强的ADM功能,在20米直径范围内,断光续接精度损失不超过10微米。是市场上其它跟踪仪的十分之一;
5、测量范围:测量范围达20米,水平测量角度无极限,垂直测量角度±145°,无需担心因为角度带来的跟踪及测量失败;
6、适用于现场操作,无线操控:内置的WiFi连接,激光跟踪仪能够与PC轻松进行无线连接,通过笔记本、台式机、智能手机进行远程控制;
7、机器人六维姿态测量系统:T-Mac 测量速率高,实现空间6D测量;最大20米(直径)的无线测量范围,较3D测量,效率提高50%以上, 测量接收角度更大,倾斜角±45°,俯仰角±45°,旋转角360°;可以实现机器人六维姿态实时动态高速测量;可以与机器人控制器实现联机,通过外部触发信号实现自动测量;
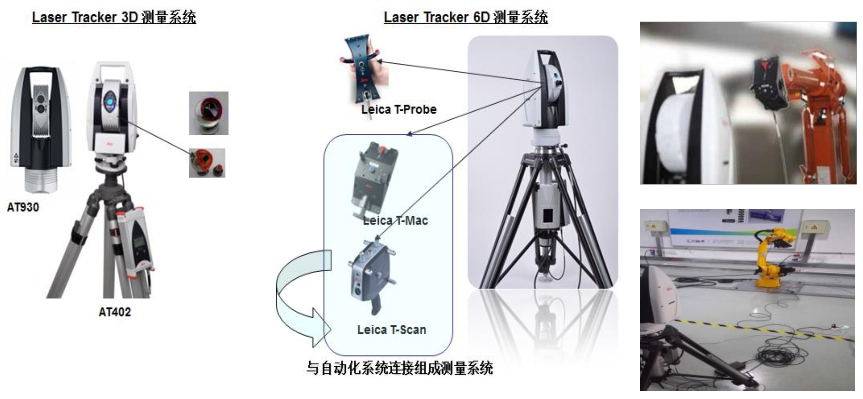
激光跟踪仪配置
三、分析软件与定制工装

各类定制工装
1、膝关节置换手术导航定位精度检测工装:功能概述:用于在关节置换手术导航定位系统辅助下的膝关节置换手术中模拟股骨髁,以检测系统的导航定位综合精度。支持点注册,面注册,平面对齐。(初级版不含自由曲面,支持2个不同平面对齐);辅助检测项目:膝关节置换手术导航定位综合精度;适用范围:关节置换手术导航定位系统(全膝关节置换、单髁膝关节置换功能);
2、髋关节置换手术导航定位精度检测工装:概述:用于在关节置换手术导航定位系统辅助下的髋关节置换手术中模拟髋臼,以检测系统的导航定位综合精度。支持点注册,面注册,髋臼对齐;辅助检测项目:髋关节置换手术导航定位综合精度;适用范围:关节置换手术导航定位系统(髋关节置换功能);
3、膝关节置换手术导航定位精度检测辅助工装:功能概述:用于在关节置换手术导航定位系统辅助下的膝关节置换手术中模拟股骨髁,以检测系统的导航定位综合精度。支持点注册,面注册,平面对齐。(高级版含自由曲面,支持5个假体平面对齐);辅助检测项目:膝关节置换手术导航定位综合精度。适用范围:关节置换手术导航定位系统(全膝关节置换、单髁膝关节置换功能)。
4、机械臂末端法兰拓展工装+电机过载检测辅助工装+电动推杆过载检测辅助工装;
5、导航式测试软件:引导客户按步骤,按工装搭建进行一体化测试分析,具备符合医疗器械行业标准的丰富应用工具与测试配置,为客户提供专业级的技术支持服务。
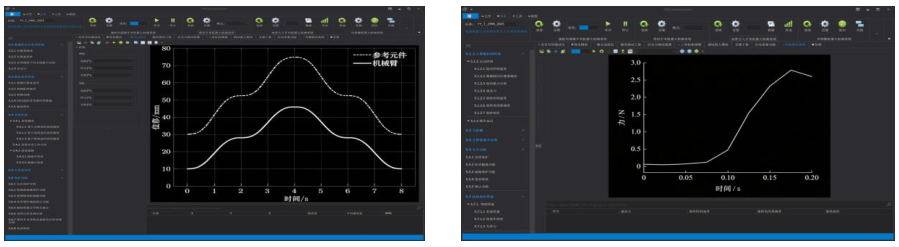
导航手术具身机器人测试软件