本文从YOLO算法的基本思想出发,对比了单阶段与双阶段检测方法的优缺点,并深入讲解了目标检测中最重要的评估指标------mAP(mean Average Precision),包含IOU、精确率、召回率的概念及手工计算示例,适合准备入门或复习目标检测的同学阅读。
一、关于YOLO
1、什么是YOLO
YOLO(You Only Look Once)是一种基于深度学习的目标检测算法,由 Joseph Redmon 等人于 2016 年首次提出。它的核心创新点在于将目标检测问题转化为一个回归问题,通过单个神经网络直接预测目标的类别和位置,而不像传统方法那样需要多个独立步骤。
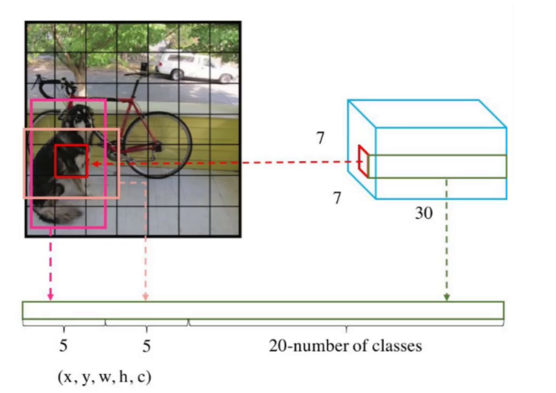
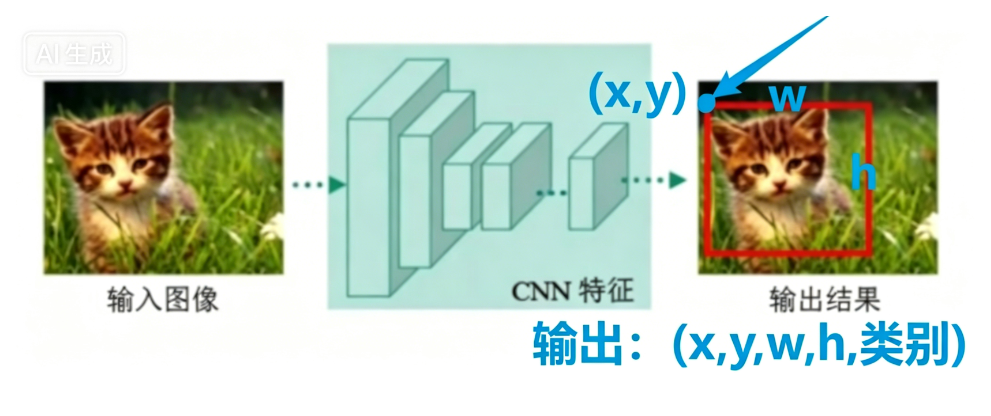
如下图所示,YOLO 将输入图像划分为 S × S 个网格(grid cell),每个网格负责预测其内部是否包含目标,并输出目标的类别概率以及边界框坐标(中心点、宽高)。
YOLO 还引入了多尺度特征融合技术,使得网络可以在不同尺度的特征图上进行检测,从而兼顾大目标与小目标的识别效果。值得注意的是:传统残差网络(如 ResNet-18/ResNet-50)输入尺寸通常固定,而 YOLO 模型可以接受不同尺寸的输入图像(通过调整最后几层的卷积步长或使用自适应池化),因此泛化能力更强。
与传统目标检测算法(R-CNN 系列)的对比:
| 特性 | YOLO (单阶段) | R-CNN / Faster R-CNN (两阶段) |
|---|---|---|
| 处理思路 | 回归问题,一步到位 | 区域提名 + 分类/回归 |
| 检测速度 | 极快(可达 45~155 FPS) | 较慢(约 5~15 FPS) |
| 检测精度 | 较高(小物体略弱) | 更高(尤其小物体) |
| 训练难度 | 端到端,相对简单 | 复杂,需要额外配置 |
关于"端到端"的解释
端到端训练指的是:原始数据(如摄像头图像)直接输入模型,模型直接输出最终的决策结果(如方向盘角度、刹车信号),中间无需人工设计特征或分模块处理。例如早期自动驾驶系统可能是:图像 → 检测 → 分类 → 规则判断 → 控制;而端到端的方式则是:图像 → 模型 → 直接输出控制指令。YOLO 就具备端到端特性,从图像直接输出物体类别和位置。
2、经典的检测方法
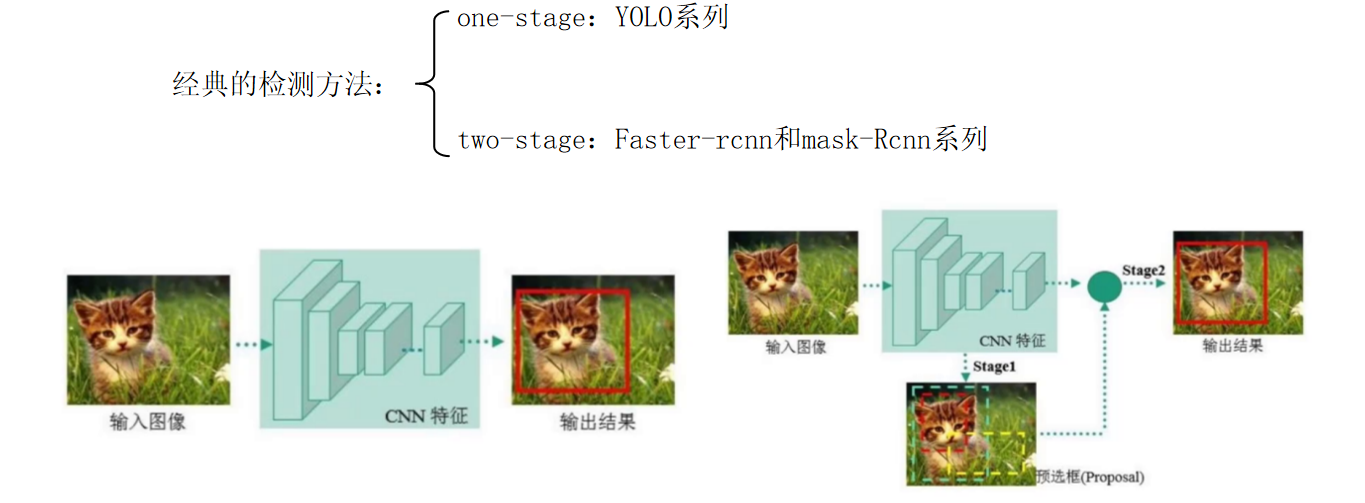
目标检测算法发展至今,主要分为两大类:单阶段检测(one-stage) 和 多阶段检测(two-stage)。
1)one-stage 单阶段检测
代表算法:YOLO 系列(v1~v10)、SSD、RetinaNet
核心思想:直接在网络中生成物体的类别概率和边界框位置,不需要候选区域提名的中间步骤。
优点:
-
检测速度极快,适合实时任务(如视频监控、自动驾驶感知)。
-
网络结构相对简单,易于端到端训练。
缺点:
-
在小物体及严重遮挡场景下,精度往往低于两阶段方法。
-
对定位精度要求极高时,可能需要更复杂的设计(如多尺度、注意力机制)。
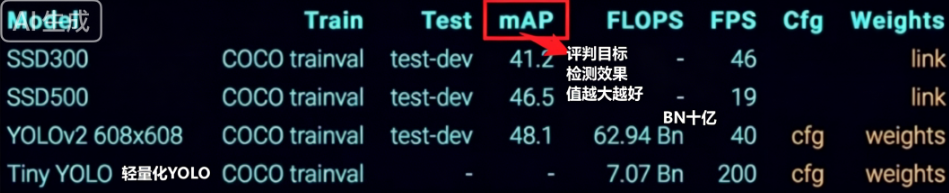
常用模型指标介绍:
-
mAP:平均精度均值,是衡量目标检测综合性能的核心指标(越大越好)。
-
FLOPS(Floating Point Operations Per Second):模型处理一张图像所需的浮点运算次数,反映计算复杂度。
-
FPS(Frames Per Second):每秒可处理的图像数量,反映实际运行速度。
2)two-stage 多阶段检测
代表算法:R-CNN、Fast R-CNN、Faster R-CNN、Mask R-CNN
核心流程:
-
第一段 -- 候选区域生成:使用选择性搜索(Selective Search)、Region Proposal Network(RPN)等方法从图像中提取 2000 个左右的候选框。
-
第二段 -- 精细分类与回归:对每个候选框提取特征,再进行类别判断和边界框微调。
优点:
-
检测精度高,尤其是小目标和复杂背景下的识别。
-
支持实例分割(如 Mask R-CNN 同时输出掩膜)。
缺点:
-
速度较慢,通常只有 5 FPS 左右,达不到实时要求。
-
训练和推理资源消耗更大。
二、关于 mAP 指标
1、概念
mAP(mean Average Precision) 是目标检测任务中最公认的性能评价指标。它综合了精确率(Precision) 和召回率(Recall) 两种指标,并对每个类别分别计算 AP(Average Precision),最后对所有类别的 AP 求均值。
-
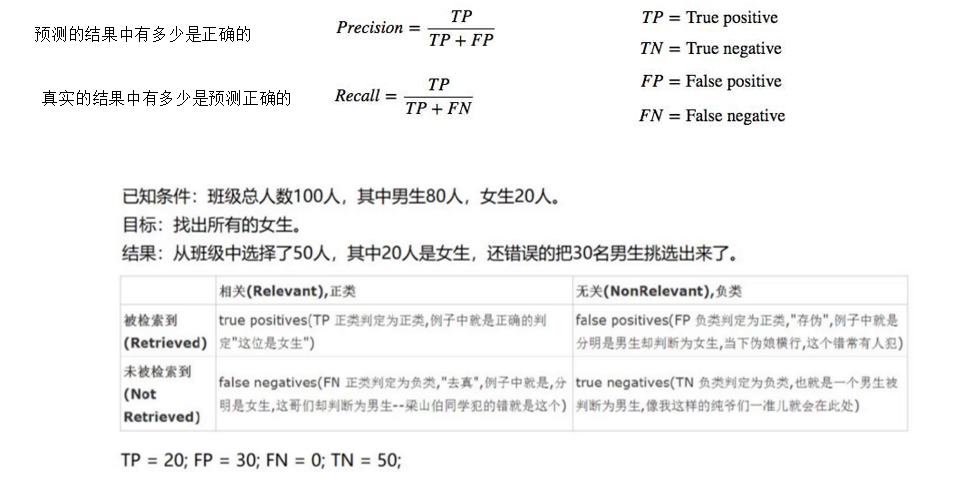
精确率(Precision) :模型预测为正类的样本中,实际真的是正类的比例。
公式:
Precision = TP / (TP + FP) -
召回率(Recall) :所有真实正类样本中,被模型正确预测出来的比例。
公式:
Recall = TP / (TP + FN)
其中:
-
TP:真正例(预测为正,实际为正)
-
FP:假正例(预测为正,实际为负)
-
FN:假负例(预测为负,实际为正)
mAP 值越大,说明检测模型在所有类别上的综合表现越好。
2、IOU(交并比)
IOU(Intersection over Union)用于衡量预测框与真实框之间的重叠程度,是判定检测是否正确的关键标准。
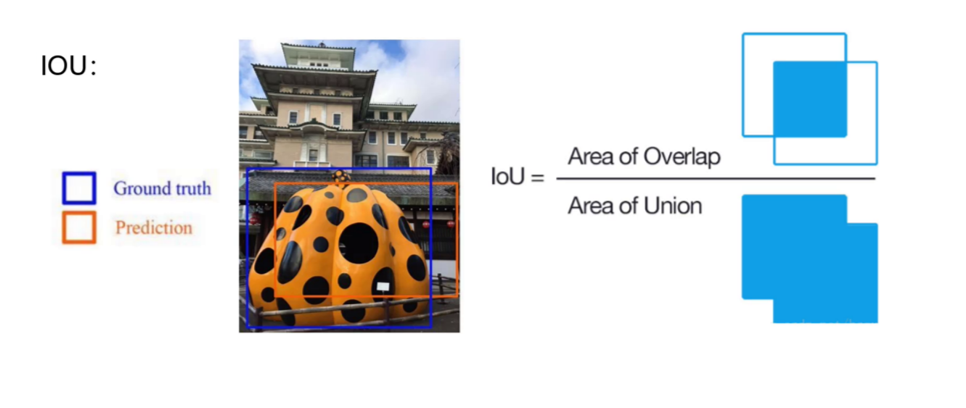
计算公式为:
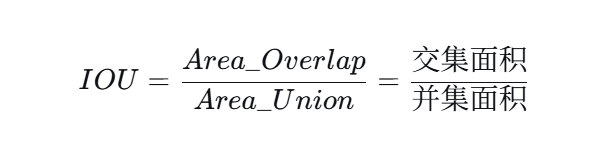
通常约定:
-
IOU ≥ 0.5 时认为该预测为正确检测(TP)
-
IOU 阈值可根据任务调整(例如 COCO 数据集使用 0.5~0.95 的平均值)
3、关于召回率和准确率
两者关系常用混淆矩阵来理解:
| 真实 \ 预测 | 正类(Positive) | 负类(Negative) |
|---|---|---|
| 正类(True) | TP | FN(漏检) |
| 负类(False) | FP(误检) | TN(正确负类) |
-
准确率关心的是"预测出来的结果中有多少是对的"。
-
召回率关心的是"真实的结果中有多少被找出来了"。
通常情况下,二者相互制约:提高准确率往往会导致召回率下降,反之亦然。因此需要 P-R 曲线 来综合评估。
4、示例
假设人脸检测任务中,真实图像有 3 张真实人脸 (蓝色框),模型预测出了若干红色框,每个框附带置信度(confidence score),例如 0.95、0.8、0.6 等。
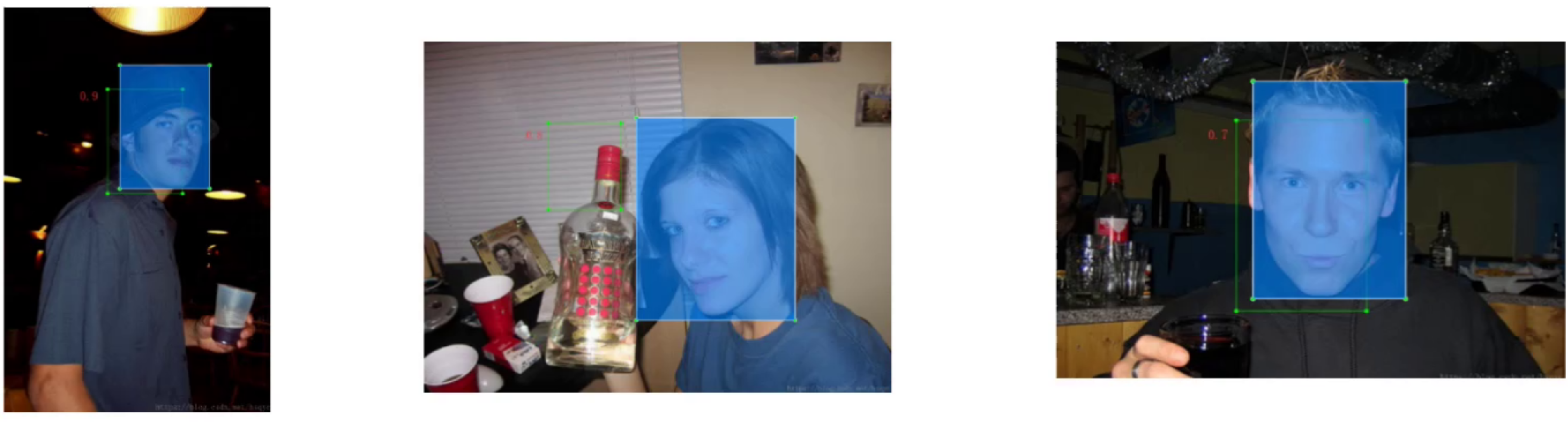
计算步骤(设定 IOU ≥ 0.5 且置信度 ≥ 0.9 才算正确):
-
按置信度排序(从高到低),依次判断每个预测框是否为 TP。
-
假设只有 1 个预测框 同时满足:IOU ≥ 0.5 且 置信度 ≥ 0.9 → 标记为 TP
另外 2 个真实人脸 没有被任何检测框覆盖 → 标记为 FN
没有错误的预测框(FP = 0)。
-
计算指标:
-
TP = 1
-
FP = 0
-
FN = 2
-
Precision=TPTP+FP=11+0=1.0Precision=TP+FPTP=1+01=1.0
-
Recall=TPTP+FN=11+2=0.333Recall=TP+FNTP=1+21=0.333
-
注:这只是单个置信度阈值下的结果。实际 mAP 需要遍历所有可能的阈值(从 0 到 1),得到一系列 Precision--Recall 点,并计算 P-R 曲线下的面积。
5、计算 mAP
标准计算流程:
-
对每个类别,按预测置信度从高到低排序。
-
设定一系列 IOU 阈值(如 0.5),对于每个置信度阈值,计算对应的 (Recall, Precision)。
-
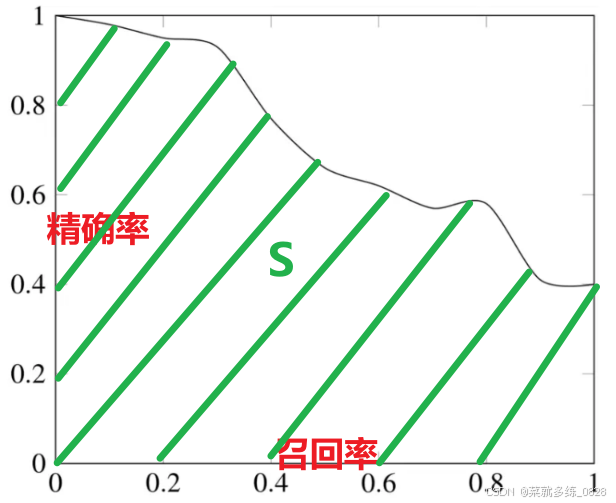
绘制 P-R 曲线,横轴为召回率,纵轴为精确率。
-
计算曲线下的面积(通常采用插值法,如 11 点插值或 COCO 的 101 点积分),得到该类别的 AP(Average Precision)。
-
对所有类别的 AP 取算术平均值,即为 mAP。
总结:
-
mAP 越大 → 模型既能把目标找全(高召回率),又能找得准(高精确率)。
-
在论文或比赛里,通常报告 mAP@0.5 (IOU=0.5)或 mAP@0.5:0.95(多个 IOU 阈值平均)。
写在最后
通过本文,您应该已经掌握了:
-
YOLO 的核心思想及单阶段/两阶段检测方法的本质区别;
-
目标检测的关键评估指标 mAP 及其计算所依赖的 IOU、Precision、Recall;
-
通过一个具体的小示例,理解了阈值如何影响 TP、FP、FN 的计算。
目标检测是计算机视觉领域的基石之一,而 YOLO 系列至今仍在不断进化。理解好这些基础概念,无论是阅读论文还是动手实践,都会更加游刃有余。
如果您对 YOLOv8、YOLOv9 等新版本,或 mAP 的代码实现(Python/PyTorch)感兴趣,欢迎在评论区留言,我们下一期再见!