程序首先设置多个蓝牙锚节点的位置坐标,并给定待定位目标的真实位置。随后计算目标与各锚节点之间的真实距离,并在理论RSSI值中加入高斯噪声,用于模拟实际蓝牙信号传播过程中由遮挡、多径效应、设备误差和环境干扰引起的测量波动。这样可以更接近实际蓝牙定位中的RSSI不稳定特性。
文章目录
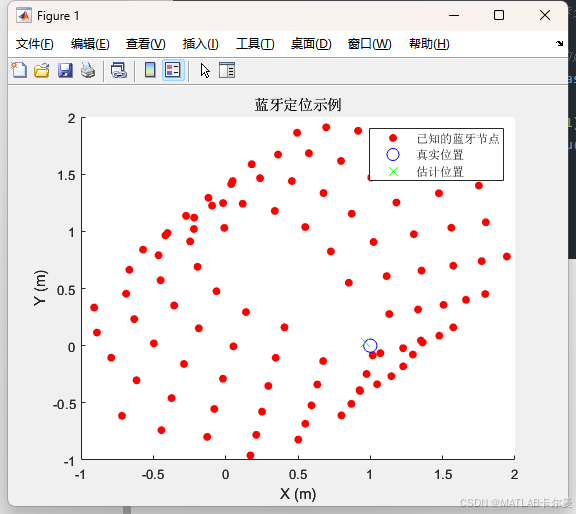
运行结果
蓝牙基站的坐标点、待定位点真实值、计算的得到的待定位点示意图:
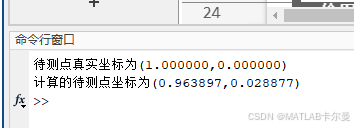
命令行输出待测点真实坐标 和计算的待测点坐标 :
程序功能
这款基于接收信号强度指示( R S S I RSSI RSSI)原理的蓝牙定位程序专为二维平面定位设计,通过N个蓝牙锚点实现对未知位置的精准定位。程序利用信号强度衰减模型,模拟测量误差,并通过可视化图形展示锚点、真实位置和估计位置,适用于室内导航、智能家居和资产追踪等多种应用。
结构如下:
程序采用经典对数路径损耗模型描述RSSI与距离之间的关系:
R S S I ( d ) = R S S I 0 − 10 n log 10 ( d ) + v RSSI(d)=RSSI_0-10n\log_{10}(d)+v RSSI(d)=RSSI0−10nlog10(d)+v
其中, R S S I 0 RSSI_0 RSSI0表示距离发射节点 1 , m 1,m 1,m 处的参考信号强度, n n n 为路径损耗因子, d d d 为待测点到蓝牙锚节点的距离, v v v 为RSSI测量噪声。根据该模型,可以由RSSI观测值反算待测点到各锚节点的距离:
d = 10 R S S I 0 − R S S I 10 n d=10^{\frac{RSSI_0-RSSI}{10n}} d=1010nRSSI0−RSSI
在位置解算阶段,程序将RSSI反算得到的距离作为输入,结合锚节点已知坐标建立二维距离观测方程。对于第 i i i 个锚节点,其距离方程可表示为:
( x − x i ) 2 + ( y − y i ) 2 = d i 2 (x-x_i)^2+(y-y_i)^2=d_i^2 (x−xi)2+(y−yi)2=di2
其中, ( x , y ) (x,y) (x,y) 为待估计目标位置, ( x i , y i ) (x_i,y_i) (xi,yi) 为第 i i i 个蓝牙锚节点坐标, d i d_i di 为由RSSI估计得到的距离。通过选取第一个锚节点作为参考点,将非线性距离方程进行差分线性化,可得到如下线性方程组:
H X = a HX=a HX=a
其中, X = x , y T X=x,y^T X=x,yT 为待估计位置向量, H H H 为由锚节点坐标构成的系数矩阵, a a a 为由锚节点坐标和估计距离构成的观测向量。由于锚节点数量通常大于二维位置未知量数量,因此该方程组属于超定方程,程序采用最小二乘方法进行求解:
X ^ = ( H T H ) − 1 H T a \hat{X}=(H^TH)^{-1}H^Ta X^=(HTH)−1HTa
源代码
可接MATLAB下定位相关的程序设计,咨询请通过私信或下方联系方式⬇️