实景三维重建领域,无人机航拍可快速获取大范围高空影像,但近地面建筑立面、遮挡区域存在盲区,易导致模型空洞、扭曲;地面激光扫描仪能还原局部精细结构,却缺少空中视角,无法覆盖大场景全局。单一采集方式无法实现全域无死角重建,而传统解决方案一般采用无人机航拍+照片补拍,需人工确定补拍位置、内业手工空三刺点,对作业人员经验要求高、工作量大,成果质量难以保障。
针对此难题,大势智慧推出智影R200免像控空地融合建模解决方案,外业采用无人机航拍+智影R200手持SLAM采集,内业通过配套智影模形软件一站式融合建模,大幅简化作业流程、减少人工干预,实现全域无死角、高精度实景三维重建,全面还原复杂场景的空间结构与真实纹理。
核心技术路线
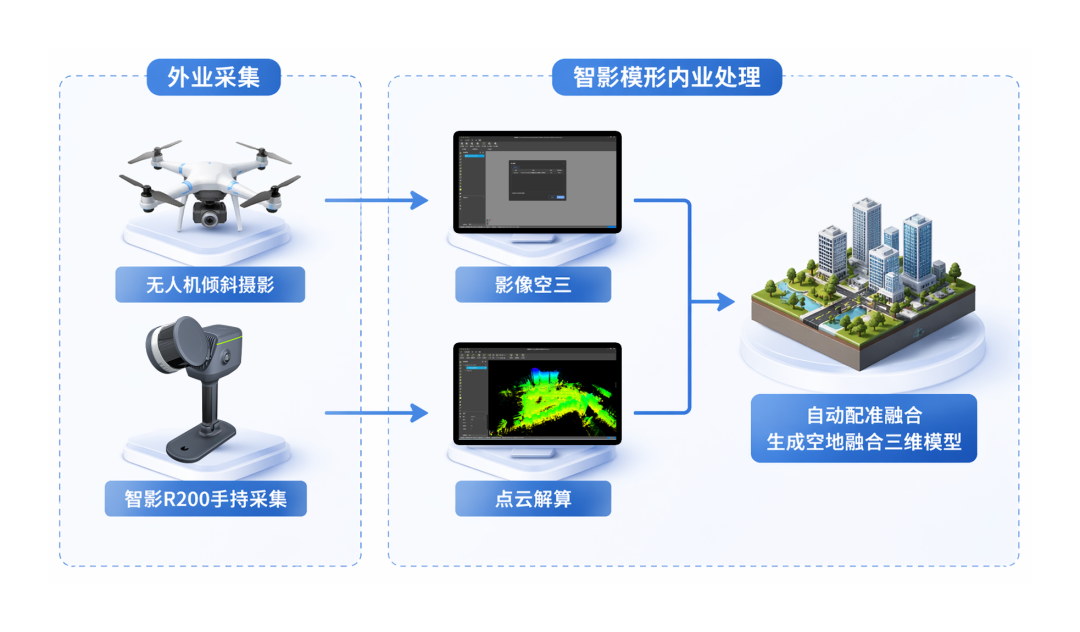
外业采集流程
空中无人机航测:
1)飞行航线:采用扫描航线(建图航拍);
2)飞行航高:按照要求的地物分辨率设置,一般建议航高为测区大部分楼高的2倍;
3)重叠度:航向重叠度80%,旁向重叠度70%~75%;
地面端智影R200扫描:
1)提前设计采集路线,确保应采尽采;
2)为获得较好的纹理,全景相机与被采物体尽量保持平行,遇遮挡区域可使用延长杆,确保地面端数据完整;
3)RTK保持固定解
基于智影R200的免像控空地融合建模,外业采集基本要求:
1)仅支持大疆Mavic3E、Matrice4E无人机航测数据;(重建大师软件的空地融合功能支持更多数据类型)
2)无人机航测与智影R200在采集过程中均需开启RTK功能,确保RTK信号良好;
3)单测区范围一般不超过0.5平方公里;
4)尽可能同步采集,以确保场景的一致性。
内业处理流程
重建全流程无需多软件切换,依托智影模形软件实现一站式处理:
SLAM****处理:
1)添加扫描数据:导入智影R200手持SLAM采集的点云数据;

2)点云一键处理:软件自动完成点云解算、优化,生成高精度地面点云成果。

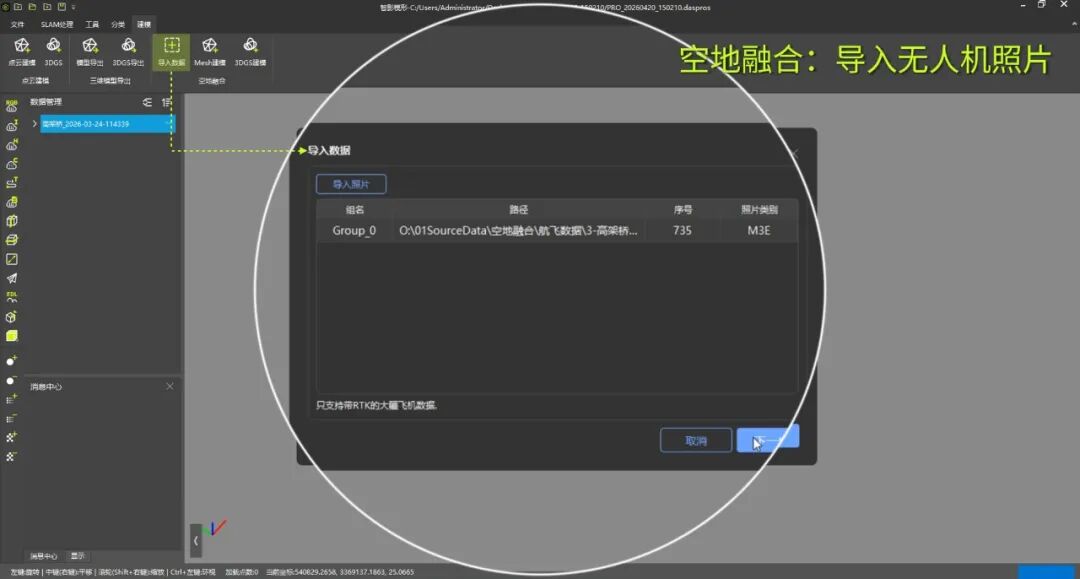
空地融合:
1)导入数据:在空地融合模块下导入无人机倾斜摄影照片、激光点云测站数据;

2)空地融合建模:选择空地融合模块下的Mesh建模,自主选择纹理来源与重建范围,软件自动完成配准与融合重建,生成空地融合三维模型。

关键技术突破
空地融合建模的核心难点是不同坐标系、不同尺度数据的精准匹配与一体化表达,智影R200免像控空地融合建模解决方案从配准精度与纹理效果两方面实现关键技术突破:
高精度数据配准
依托无人机与智影R200的RTK高精度定位能力,无需布设像控点,利用智影R200采集的高密度地面点云,通过智能算法自动识别并提取与无人机影像重叠区域的特征点,实现异源数据的高精度坐标对齐,确保模型在接边处无分层、无扭曲。
纹理映射优化
针对无人机影像与地面手持影像在接边区域可能存在色彩差异、拼接痕迹的问题,将二者进行联合平差处理,优化空中与地面纹理的过渡效果,保证模型在融合区域的色彩统一、纹理连贯。

应用案例
高架桥空地融合
解决传统倾斜摄影桥底盲区的墩柱、管线等建模粘连问题,精准还原桥梁底部墩柱及附属设施,为桥梁健康监测、改扩建工程提供高精度三维底图
智影R200 高架桥空地融合重建
外业采集:大疆M3E、智影R200
无人机航高:60m
采集时间:无人机15min、手持30min
采集里程:700m
建模软件:智影模形
美丽乡村空地融合
构建乡村全域实景三维模型,清晰呈现乡村建筑、道路、地形,支撑美丽乡村规划及乡村数字化存档等应用。
智影R200 乡村全域空地融合重建
外业采集:大疆M3E、智影R200
无人机航高:80m
采集时间:无人机20min、手持20min
采集面积:60000㎡
建模软件:智影模形
室内外一体化空地融合
实现建筑室内外全场景一体化建模,从室外环境到室内布局无缝衔接,支撑建筑设计优化、BIM运维管理、历史建筑数字化保护等应用。
智影R200室内外一体化空地融合重建
外业采集:大疆M3E、智影R200
无人机航高:30m
采集时间:无人机10min、手持13min
采集面积:1300㎡
建模软件:智影模形