文章目录
- [Linux Power Management 子系统:从 suspend/resume 到 Runtime PM、PM QoS](#Linux Power Management 子系统:从 suspend/resume 到 Runtime PM、PM QoS)
-
- [1. 先分清两类 PM:整机睡眠和运行态省电](#1. 先分清两类 PM:整机睡眠和运行态省电)
- [2. System suspend:从 `/sys/power/state` 到平台固件](#2. System suspend:从
/sys/power/state到平台固件) - [3. 为什么 suspend 前要 freeze 进程](#3. 为什么 suspend 前要 freeze 进程)
- [4. 设备 PM 回调:不是所有动作都塞进 `suspend()`](#4. 设备 PM 回调:不是所有动作都塞进
suspend()) - [5. Wakeup source:能中断,不等于能唤醒系统](#5. Wakeup source:能中断,不等于能唤醒系统)
- [6. Runtime PM:系统醒着,设备也可以睡](#6. Runtime PM:系统醒着,设备也可以睡)
- [7. CPUIdle、CPUFreq、OPP:CPU 省电不是一个按钮](#7. CPUIdle、CPUFreq、OPP:CPU 省电不是一个按钮)
- [8. PM QoS:它不是省电按钮,而是约束系统别省过头](#8. PM QoS:它不是省电按钮,而是约束系统别省过头)
- [9. 调试 suspend/resume 时按层切,不要一把抓](#9. 调试 suspend/resume 时按层切,不要一把抓)
- [10. 写驱动时的 PM checklist](#10. 写驱动时的 PM checklist)
- 参考资料
Linux Power Management 子系统:从 suspend/resume 到 Runtime PM、PM QoS
做 Linux 驱动或 BSP 时,电源管理问题通常不是一句"进 suspend 了"就能解释清楚的。
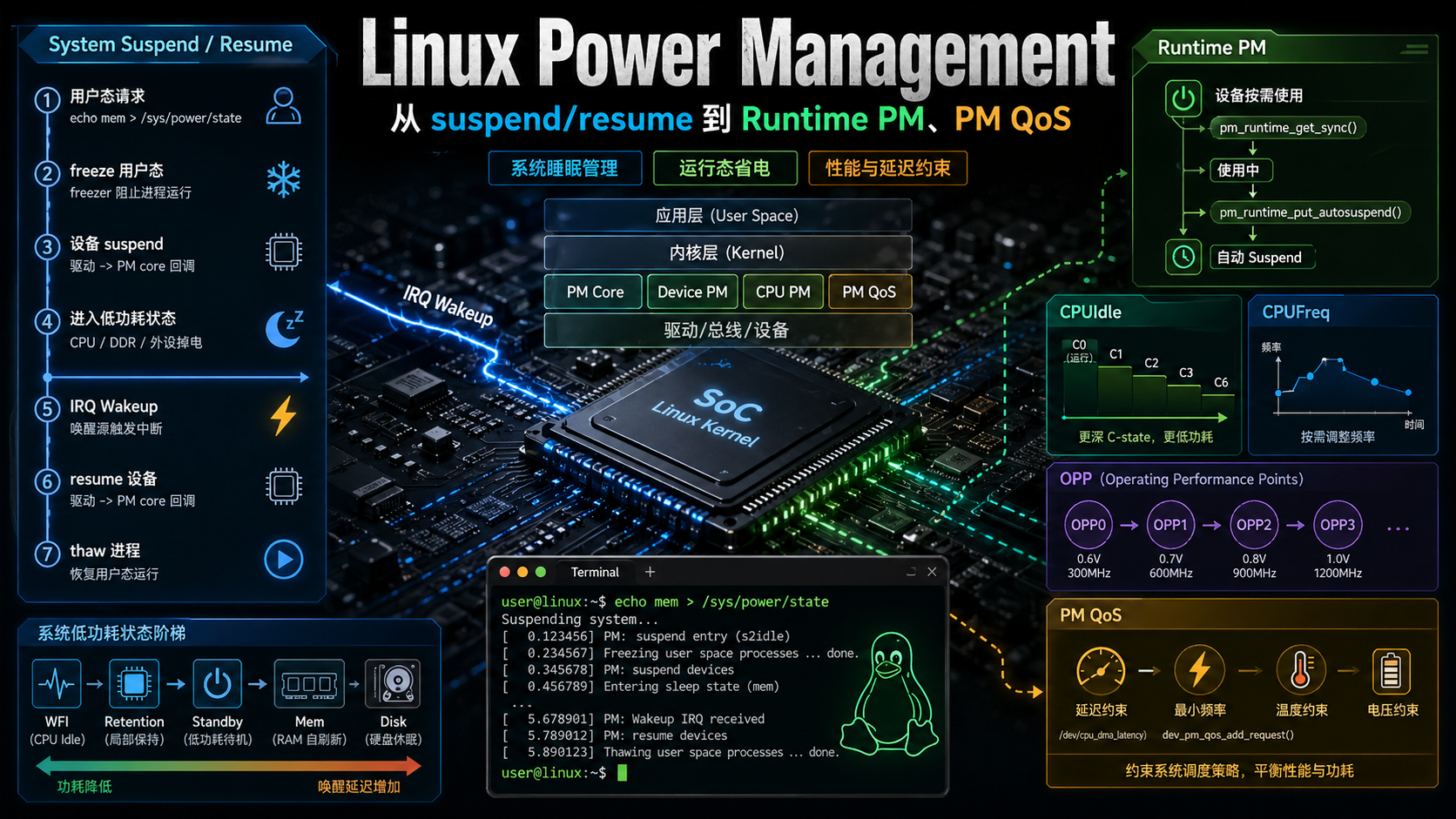
同样是省电,echo mem > /sys/power/state 是整机进入睡眠;pm_runtime_put_autosuspend() 是单个设备在运行态下自动降功耗;CPUIdle 是 CPU 在没有任务时挑一个合适的 C-state;CPUFreq/Devfreq 是运行中根据负载调频;PM QoS 则经常反过来告诉内核"别睡太深, latency 顶不住"。
这些机制都属于 Linux Power Management,但它们解决的问题完全不同。本文按一条主线把它们串起来:先分清 system-wide PM 和 working-state PM,再看 suspend/resume 的路径、wakeup IRQ 的处理方式,最后回到 Runtime PM、CPUIdle、DVFS 和 PM QoS。
1. 先分清两类 PM:整机睡眠和运行态省电
Linux 内核文档把电源管理分成两种高层策略:
| 策略 | 典型场景 | 核心目标 | 常见机制 |
|---|---|---|---|
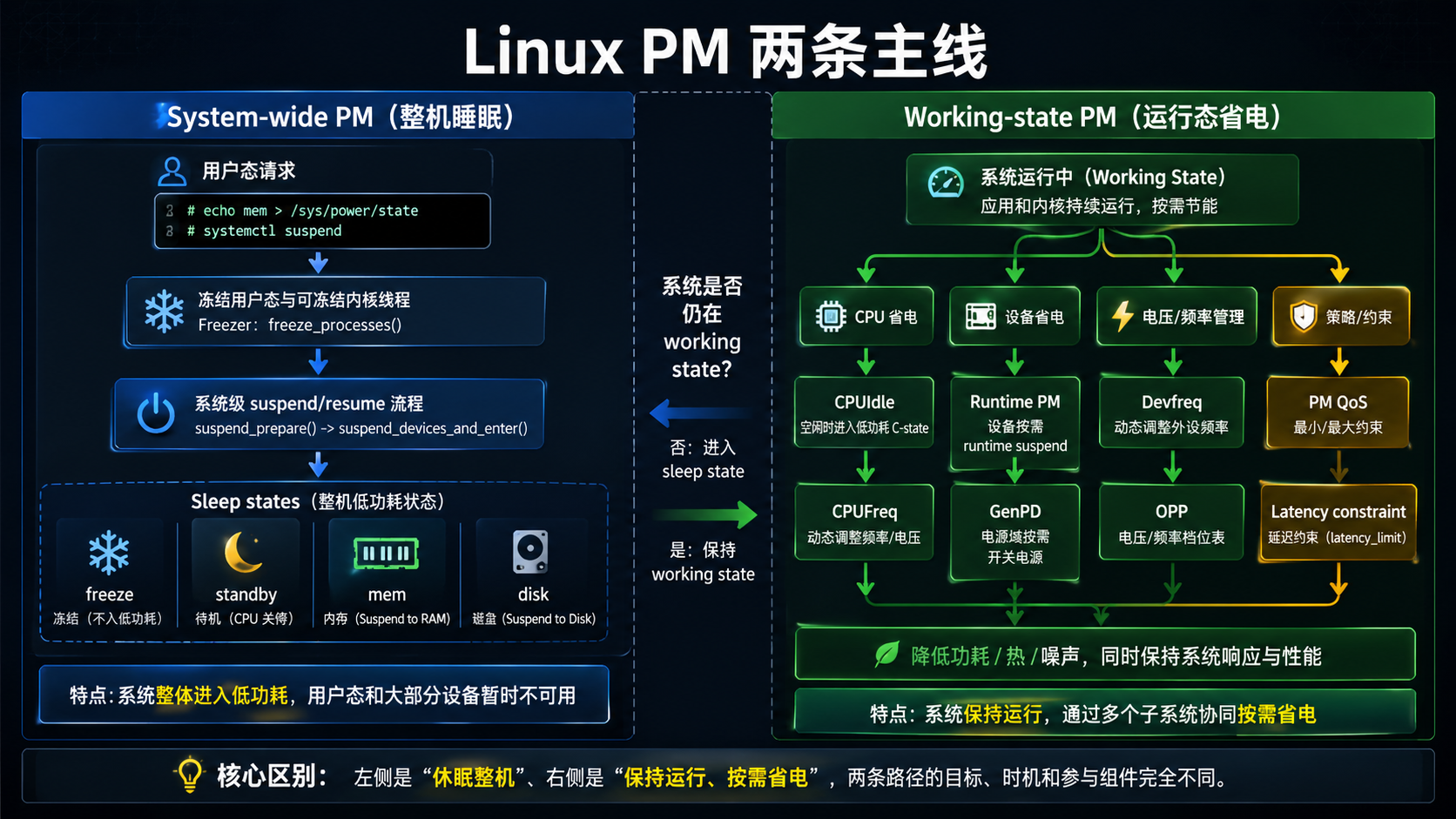
| System-wide power management | 系统长时间不用,要进入睡眠 | 让整个系统进入一个全局低功耗状态,用户态停止运行 | freeze、standby、mem、disk、system suspend/resume |
| Working-state power management | 系统仍在工作,但某些 CPU 或设备暂时不用 | 在不停止整个系统的前提下降低局部功耗 | Runtime PM、CPUIdle、CPUFreq、Devfreq、OPP、GenPD、PM QoS |
原资料里把这两类称为 Static 和 Dynamic。更准确地说,Static 关注"系统整体已经不活跃时怎么省电",Dynamic 关注"系统还在运行时,短暂空闲或负载变化时怎么省电"。
不要把这两类混在一起看。system suspend 会冻结用户态、停止设备、关 CPU、进入平台 sleep state;Runtime PM 不会冻结用户态,它只管理单个设备的运行态 idle;CPUIdle 甚至是每个 CPU 在 idle loop 里根据预测挑一个睡眠深度。
2. System suspend:从 /sys/power/state 到平台固件
用户态触发系统睡眠最常见的入口是 /sys/power/state:
bash
cat /sys/power/state
cat /sys/power/mem_sleep
echo freeze > /sys/power/state
echo mem > /sys/power/state
echo disk > /sys/power/state几个常见 sleep state 的差异可以先这样记:
| 状态 | 常见名字 | 大致动作 | 唤醒代价 |
|---|---|---|---|
freeze |
Suspend-to-Idle / S2Idle | 纯软件 suspend:冻结用户态、暂停 timekeeping、设备进低功耗,CPU 进最深 idle | 最小 |
standby / shallow |
Power-on suspend | 在 S2Idle 基础上 offline nonboot CPU,挂起底层系统功能 | 中等 |
mem / deep |
Suspend-to-RAM / STR | RAM 自刷新,其他大部分模块掉电,通常需要平台/固件配合 | 较大 |
disk |
Hibernation / STD | 内存镜像写入持久化存储后掉电,唤醒时重新加载镜像 | 最大 |
在嵌入式 ARM/ARM64 SoC 上,mem/deep 往往会走到平台相关的 suspend hook,再通过 PSCI 调用进入 ATF/固件,由固件完成最后的掉电或低功耗状态切换。也就是说,Linux PM core 负责通用流程,平台代码和固件负责最后那一段 SoC 相关动作。
简化后的 suspend 路径可以看成这样:
text
echo mem > /sys/power/state
-> pm_suspend()
-> enter_state()
-> suspend_prepare()
-> suspend notifiers
-> freeze user processes
-> freeze freezable kernel threads
-> suspend_devices_and_enter()
-> dpm_suspend_start()
-> device ->prepare()
-> device ->suspend()
-> suspend_enter()
-> device ->suspend_late()
-> suspend_device_irqs()
-> device ->suspend_noirq()
-> disable_nonboot_cpus()
-> syscore_suspend()
-> platform suspend_ops->enter()Resume 基本按相反方向回来:
text
platform wakeup
-> syscore_resume()
-> enable_nonboot_cpus()
-> device ->resume_noirq()
-> resume_device_irqs()
-> device ->resume_early()
-> device ->resume()
-> device ->complete()
-> thaw tasks
-> resume notifiers这个流程里有三个分界点特别重要:
| 分界点 | 发生了什么 | 驱动要注意什么 |
|---|---|---|
| freezer 之后 | 用户态和可冻结内核线程不再正常运行 | 不要在 late 阶段还依赖用户态服务 |
| late 之后、noirq 之前 | 设备大多已经 quiesce,随后 IRQ handler 会被屏蔽 | 会和中断竞争的寄存器保存、唤醒配置要放对阶段 |
| 平台 enter 之前 | nonboot CPU offline,syscore 已 suspend | 平台 hook 里通常只剩很少的内核上下文可用 |
3. 为什么 suspend 前要 freeze 进程

Freezer 不是为了"让系统看起来安静一点",而是为了避免用户态或部分内核线程在设备 suspend 时继续访问硬件。
官方 freezer 文档里有几个关键点:
| 对象 | freeze 方式 | 驱动相关影响 |
|---|---|---|
| 用户态进程 | freezer 启动后,通过类似信号路径让任务进入冻结状态 | 用户态不会继续通过 ioctl、mmap、sysfs 等路径碰设备 |
| 可冻结内核线程 | 线程必须主动 set_freezable() 并周期性调用 try_to_freeze() 或使用 wait_event_freezable() |
驱动私有线程如果会直接访问设备,要么用 freezer,要么用更精确的锁/状态机同步 |
| 不可冻结内核线程 | 默认不会 freeze | 不能假设所有内核线程都停了 |
这解释了一个常见问题:如果 resume 回调里调用 request_firmware(),可能会卡住或超时。因为用户态还没完全回来,提供 firmware 的用户态进程可能仍处在冻结阶段。驱动需要的 firmware 应该在 suspend 前准备好,或者用合适的 notifier 提前处理。
4. 设备 PM 回调:不是所有动作都塞进 suspend()
struct dev_pm_ops 是设备驱动和 PM core 之间最常见的接口:
c
struct dev_pm_ops {
int (*prepare)(struct device *dev);
void (*complete)(struct device *dev);
int (*suspend)(struct device *dev);
int (*resume)(struct device *dev);
int (*suspend_late)(struct device *dev);
int (*resume_early)(struct device *dev);
int (*suspend_noirq)(struct device *dev);
int (*resume_noirq)(struct device *dev);
int (*runtime_suspend)(struct device *dev);
int (*runtime_resume)(struct device *dev);
int (*runtime_idle)(struct device *dev);
};写驱动时可以按阶段分配职责:
| 阶段 | 典型职责 | 不适合做什么 |
|---|---|---|
prepare() |
阻止新的 child device 注册;处理 direct-complete 判断 | 不要直接把设备打到低功耗 |
suspend() |
停 I/O、停队列、保存主要上下文、必要时配置 wakeup | 不要长时间阻塞 |
suspend_late() |
做 suspend 后半段,通常是保存剩余状态、关闭部分资源 | 不要再依赖 Runtime PM 继续调度 |
suspend_noirq() |
在普通 action IRQ handler 不会再运行后,处理会和中断竞争的状态 | 不要做需要普通中断完成的等待 |
resume_noirq() |
在 IRQ action handler 恢复前,把设备恢复到能识别中断来源的状态 | 不要假设完整业务 I/O 已恢复 |
resume_early() |
撤销 late 阶段动作 | 不要过早唤醒用户可见业务流 |
resume() |
恢复设备正常 I/O 能力 | 不要忘记 Runtime PM 状态一致性 |
complete() |
撤销 prepare 阶段动作;处理 direct-complete 后续 | 不要假设所有设备都走过完整 suspend/resume |
一个实用判断是:如果某段代码可能和中断处理函数抢同一组寄存器,它通常不应该放在普通 suspend() 里,而要考虑 late/noirq 阶段。反过来,如果某段代码需要睡眠、需要用户态、需要复杂依赖,它就不应该放到 noirq 之后。
5. Wakeup source:能中断,不等于能唤醒系统
资料里的触摸屏唤醒案例很典型:设备平时有普通中断,系统 suspend 后又希望"双击屏幕"能唤醒整机。驱动里通常会看到这些接口:
c
/* 声明设备具备 wakeup 能力,并启用 wakeup source */
device_init_wakeup(dev, true);
static int foo_suspend(struct device *dev)
{
struct foo *foo = dev_get_drvdata(dev);
if (device_may_wakeup(dev))
enable_irq_wake(foo->irq);
return 0;
}
static int foo_resume(struct device *dev)
{
struct foo *foo = dev_get_drvdata(dev);
if (device_may_wakeup(dev))
disable_irq_wake(foo->irq);
return 0;
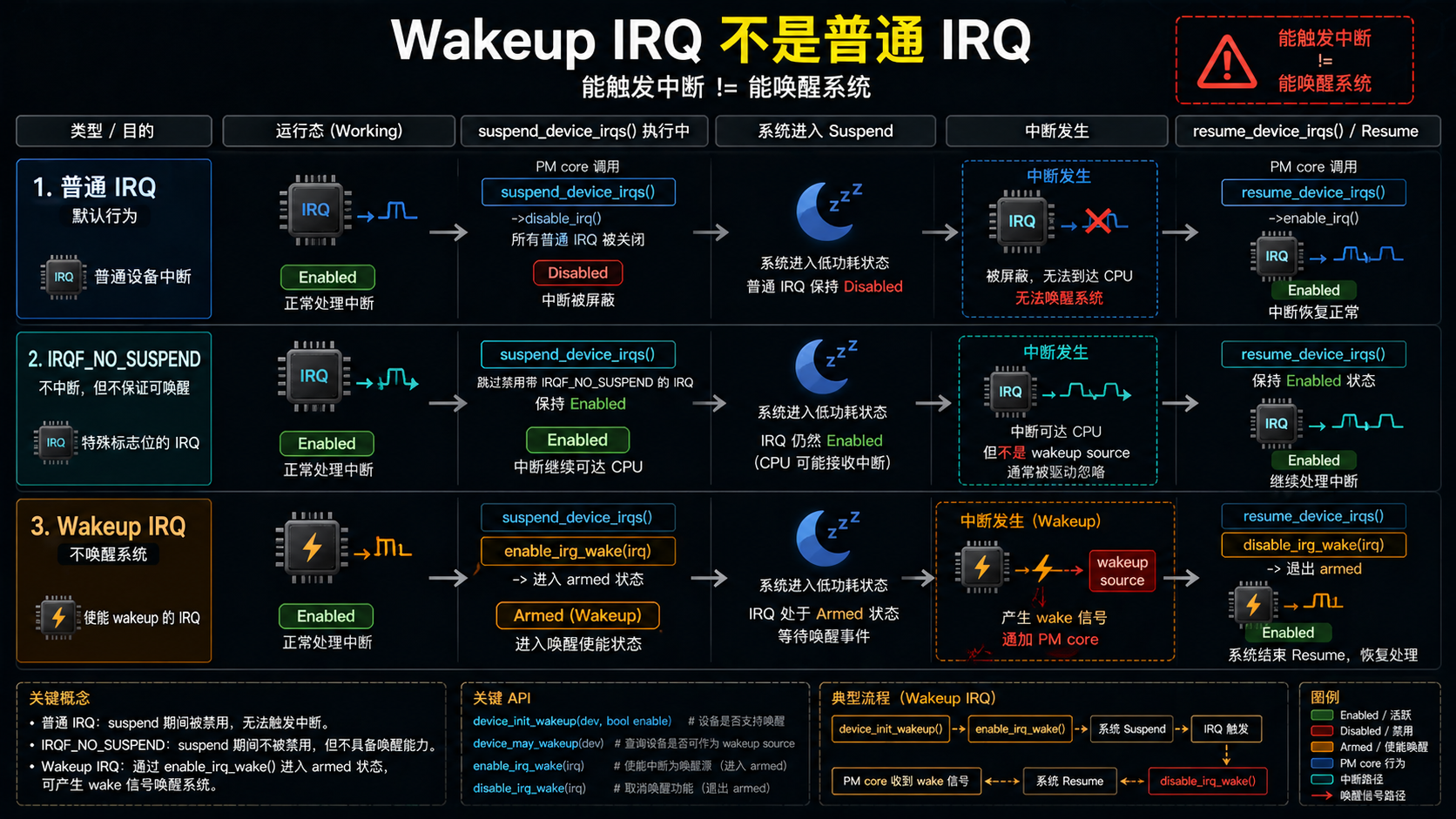
}这里最容易混淆的是 enable_irq_wake() 和 IRQF_NO_SUSPEND:
| 机制 | 作用 | 关键区别 |
|---|---|---|
enable_irq_wake() |
把某条 IRQ 配置成系统 wakeup IRQ | 目标是唤醒系统,平台可能要把信号路由到专门的唤醒逻辑 |
IRQF_NO_SUSPEND |
suspend/resume 周期内不被 suspend_device_irqs() 关闭 |
只能说明这条 IRQ suspend 时仍可触发,不保证能唤醒系统 |
官方文档明确强调:IRQF_NO_SUSPEND 不等价于系统唤醒。如果目标是把系统从 sleep state 拉回来,要使用 enable_irq_wake()。同一个设备上通常也不应该同时混用 IRQF_NO_SUSPEND 和 enable_irq_wake(),因为二者在 suspend 后是否执行普通 interrupt handler 的语义是冲突的。
再看 wakeup IRQ 的时序:
text
suspend_late 完成
-> suspend_device_irqs()
-> wakeup IRQ 保持特殊 armed 状态
-> 系统进入 sleep
-> 设备触发 wake signal
-> PM core 记录 wakeup event,启动 resume
-> resume_noirq / resume_device_irqs()
-> 设备正常 IRQ handler 才适合恢复完整处理所以双击唤醒这类驱动不要假设"中断来了就可以马上访问所有硬件资源"。如果 IRQ 线程可能在 resume 尚未完成时跑起来,常见做法是只记录 wake 事件,或者在 threaded IRQ/workqueue 中等待一个 resume completion,并且一定要带 timeout,避免 PM 路径被驱动自己卡死。
6. Runtime PM:系统醒着,设备也可以睡
System suspend 是整机级别的状态迁移;Runtime PM 是设备级别的运行态 idle 管理。
Runtime PM 的典型模型是 use count:
c
static int foo_open(struct inode *inode, struct file *file)
{
struct foo *foo = container_of(inode->i_cdev, struct foo, cdev);
pm_runtime_get_sync(foo->dev);
return 0;
}
static int foo_release(struct inode *inode, struct file *file)
{
struct foo *foo = container_of(inode->i_cdev, struct foo, cdev);
pm_runtime_mark_last_busy(foo->dev);
pm_runtime_put_autosuspend(foo->dev);
return 0;
}
static const struct dev_pm_ops foo_pm_ops = {
SET_RUNTIME_PM_OPS(foo_runtime_suspend,
foo_runtime_resume,
foo_runtime_idle)
};pm_runtime_get_sync() 表示"我要用设备,确保它恢复到 active";pm_runtime_put_autosuspend() 表示"我暂时不用了,过一段 autosuspend delay 后可以进 runtime suspend"。当 use count 归零且策略允许时,PM core 会调用 runtime_suspend();再次使用时调用 runtime_resume()。
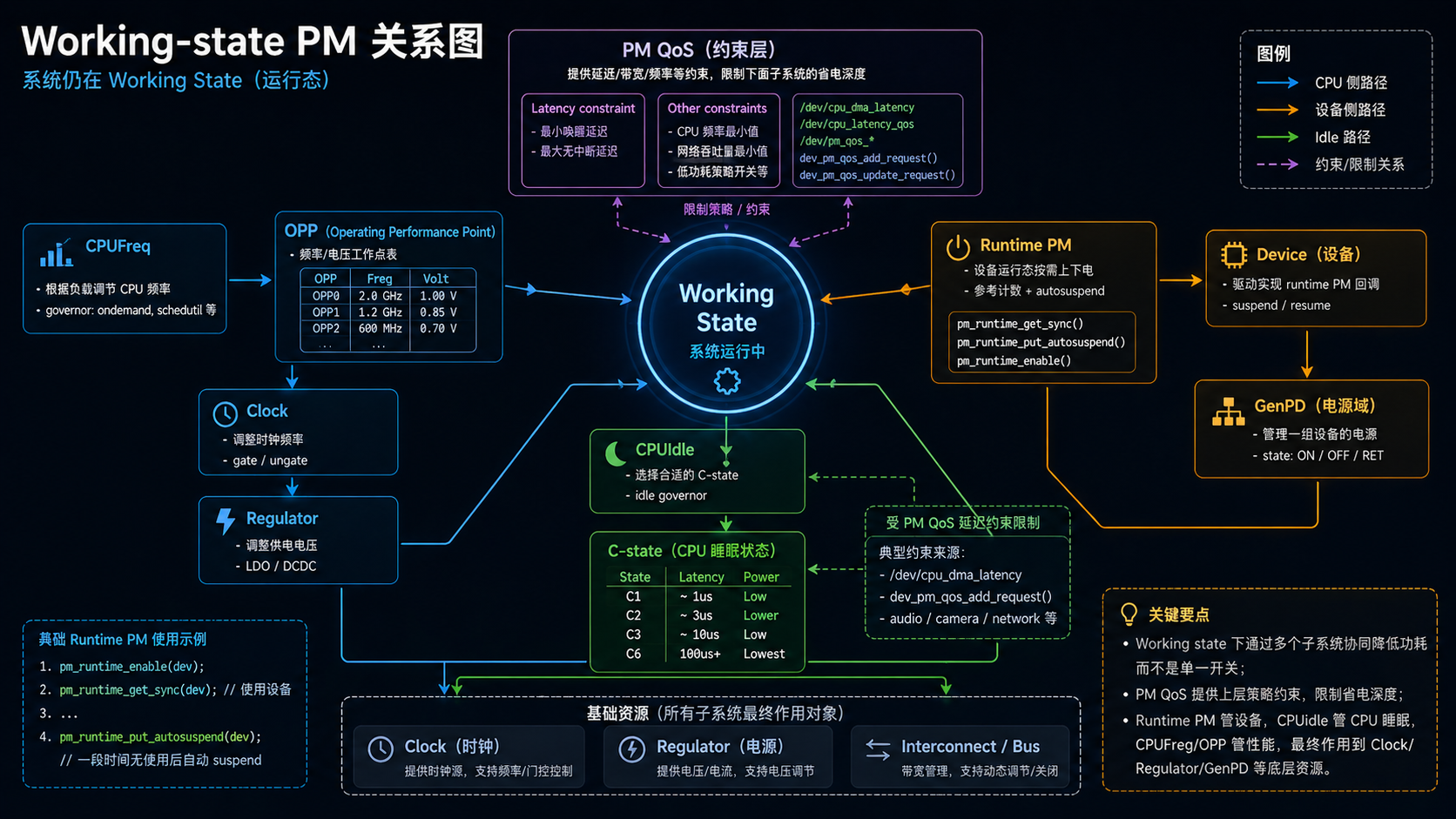
Runtime PM 的价值在于它不影响用户态整体运行,也不要求整个系统进入 sleep。摄像头、I2C/SPI 外设、GPU、显示管线、USB 控制器等,都可以在系统醒着时按需关闭 clock、regulator 或 power domain。
不过 Runtime PM 和 System PM 会相遇。系统进入 suspend 时,某个设备可能已经 runtime-suspended。驱动要决定:保持它 suspend 状态直接跨过系统睡眠,还是先 runtime resume 回来再配置系统 wakeup。这个决策没有通用答案,取决于硬件 wake 能力和子系统约束。
7. CPUIdle、CPUFreq、OPP:CPU 省电不是一个按钮
运行态 CPU 电源管理至少要分两件事:
| 子系统 | 管什么 | 典型问题 |
|---|---|---|
| CPUFreq | CPU 忙的时候跑多快,也就是 P-state / 频率电压选择 | 当前负载需要多少算力 |
| CPUIdle | CPU 没任务时睡多深,也就是 C-state 选择 | 预计能睡多久,允许多大唤醒延迟 |
CPUFreq 由 core、governor 和 driver 组成。governor 根据利用率估计需要的性能,driver 负责把请求落到硬件。很多 SoC 上 CPUFreq/Devfreq 最后都会落到 OPP,也就是一组频率、电压二元组:
text
{ 300 MHz, 1.0 V }
{ 800 MHz, 1.2 V }
{ 1 GHz, 1.3 V }OPP 的意义不是"频率列表"这么简单,而是把"这个频率至少需要多少电压"结构化,供 CPUFreq、Devfreq、thermal、regulator、clock 等模块协同使用。
CPUIdle 关注的是另一件事:当 scheduler 发现某个 CPU 没有 runnable task,CPU 会进入 idle loop。CPUIdle governor 会结合几个条件选择 idle state:
| 条件 | 为什么重要 |
|---|---|
| 下一次 timer event 还有多久 | 睡太深可能还没省回成本就被 timer 叫醒 |
| idle state 的 target residency | 进入该状态至少要待多久才划算 |
| idle state 的 exit latency | 从该状态醒来最坏要多久 |
| PM QoS latency limit | 有业务声明低延迟要求时,不能选超过限制的深睡眠 |
所以"系统耗电高"不一定是 CPUFreq 没降频,也可能是 CPUIdle 被某个 PM QoS 请求限制,只能进浅 C-state;也可能是频繁 timer/IRQ 让 CPU 根本睡不久。
8. PM QoS:它不是省电按钮,而是约束系统别省过头
PM QoS 的名字容易误导。它不是直接省电的机制,而是性能约束接口。它告诉内核:在省电时要满足某些 latency、throughput 或 device-specific 限制。
最常见的是 CPU latency QoS。内核维护一组请求,并把有效值聚合出来。对 CPU latency 来说,聚合值通常取所有请求里的最小值,因为最严格的 latency 约束必须被满足。
用户态可以通过保持 /dev/cpu_dma_latency 打开的方式提交约束:
c
int32_t latency_us = 100;
int fd = open("/dev/cpu_dma_latency", O_WRONLY);
write(fd, &latency_us, sizeof(latency_us));
/* fd 保持打开期间,请求持续有效;关闭 fd 后请求自动清理 */设备也有自己的 PM QoS:
c
struct dev_pm_qos_request qos_req;
dev_pm_qos_add_request(dev, &qos_req,
DEV_PM_QOS_RESUME_LATENCY,
500);
dev_pm_qos_update_request(&qos_req, 1000);
dev_pm_qos_remove_request(&qos_req);这类约束会影响 Runtime PM、GenPD governor、CPUIdle state 选择等策略。比如音频播放需要稳定低延迟时,系统可能不能让 CPU 进入 exit latency 很大的深 C-state;某个设备 resume latency 受限时,它所在的 power domain 可能不能轻易 power off。
9. 调试 suspend/resume 时按层切,不要一把抓
调试 PM 问题最怕从整条链路同时猜。更好的办法是按层拆:
| 现象 | 优先检查 |
|---|---|
写 /sys/power/state 后直接失败 |
dmesg 里 PM core 报错、freezer 是否失败、哪个 device callback 返回错误 |
| 能 suspend 但马上醒 | wakeup source、/proc/interrupts、/sys/kernel/debug/wakeup_sources、ACPI/SoC wake IRQ |
| suspend 卡住 | device suspend callback 是否阻塞、是否在 noirq 后等待普通中断、是否请求用户态资源 |
| resume 后设备不可用 | resume_noirq/early/resume 阶段是否恢复寄存器、clock/regulator、IRQ 状态 |
| 运行态功耗高 | CPUIdle state、PM QoS 请求、timer/IRQ 唤醒频率、Runtime PM use count |
常用命令可以先准备这些:
bash
dmesg -T | grep -iE 'PM:|suspend|resume|wakeup|freez|irq'
cat /sys/power/state
cat /sys/power/mem_sleep
cat /sys/power/wakeup_count
find /sys/devices -path '*/power/wakeup' -print
mount -t debugfs none /sys/kernel/debug
cat /sys/kernel/debug/wakeup_sources
cat /proc/interrupts
cat /sys/devices/system/cpu/cpuidle/current_driver
cat /sys/devices/system/cpu/cpuidle/current_governor_ro如果内核打开了 CONFIG_PM_DEBUG,还可以用 /sys/power/pm_test 按层测试:
bash
cat /sys/power/pm_test
echo freezer > /sys/power/pm_test
echo mem > /sys/power/state
echo devices > /sys/power/pm_test
echo mem > /sys/power/state
echo none > /sys/power/pm_testfreezer -> devices -> platform -> processors -> core 是逐步深入的。哪一级失败,就先看那一级之前刚引入的动作,不要一开始就怀疑全部驱动或整个平台固件。
10. 写驱动时的 PM checklist
最后给一个驱动侧 checklist:
| 问题 | 建议 |
|---|---|
| 设备是否能作为系统唤醒源 | probe 时用 device_init_wakeup();suspend/resume 中按 device_may_wakeup() 配置 enable_irq_wake() / disable_irq_wake() |
| suspend 回调是否会等用户态 | 不要在 suspend 后半程依赖用户态;firmware 等资源提前准备 |
| 是否在 noirq 阶段等待普通 IRQ | 避免;普通 action handler 已被屏蔽 |
| 是否有 runtime PM | system PM 回调要考虑设备已经 runtime-suspended 的情况 |
| 是否共享 power domain | 不要只看单设备,GenPD 可能因为同域其他设备或 QoS 不能 power off |
| 是否有低延迟业务 | 检查 PM QoS 请求,CPUIdle/Runtime PM 可能因此被限制 |
| resume 后硬件是否可能被重置 | 对 deep sleep/平台 suspend 要能完整 reinit,不能只假设寄存器保持 |
把 Linux PM 看成一条链会很乱。更好的心智模型是:system-wide PM 负责"整机什么时候睡、怎么睡、怎么醒";working-state PM 负责"系统醒着时,哪些局部资源可以按需降功耗";PM QoS 则是在二者之间不断加约束,防止省电策略破坏 latency、throughput 或设备恢复时间。
调 suspend/resume 时,先定位自己站在哪一层,再看对应的接口和时序。这样问题会小很多。
参考资料
- Linux Kernel Documentation: Power Management Strategies
- Linux Kernel Documentation: System Sleep States
- Linux Kernel Documentation: System Suspend Code Flows
- Linux Kernel Documentation: Device Power Management Basics
- Linux Kernel Documentation: System Suspend and Device Interrupts
- Linux Kernel Documentation: Freezing of tasks
- Linux Kernel Documentation: Runtime Power Management Framework for I/O Devices
- Linux Kernel Documentation: PM Quality Of Service Interface
- Linux Kernel Documentation: CPU Idle Time Management
- Linux Kernel Documentation: CPU Performance Scaling
- Linux Kernel Documentation: Operating Performance Points Library
- Linux Kernel Documentation: Device Frequency Scaling
- Thara Gopinath / Viresh Kumar: Linux Kernel Power Management: An Overview
- LoyenWang: Linux Suspend 流程分析
- hello_yj: Linux resume 流程