本文将为大家带来金地杯超详细的解题思路,因题目不难、故本文将思路以及部分模型的结果将一起为大家呈现,以便大家可以根据结果以及求解过程更好的理解该题
A题 多源融合机器人定位及任务优化
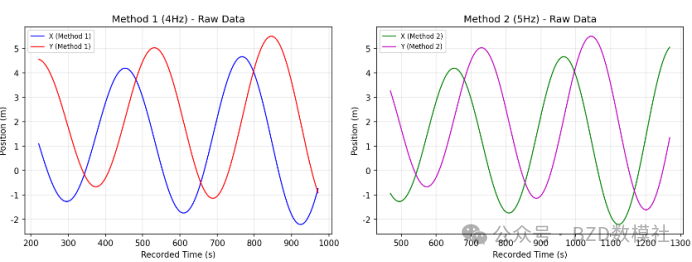
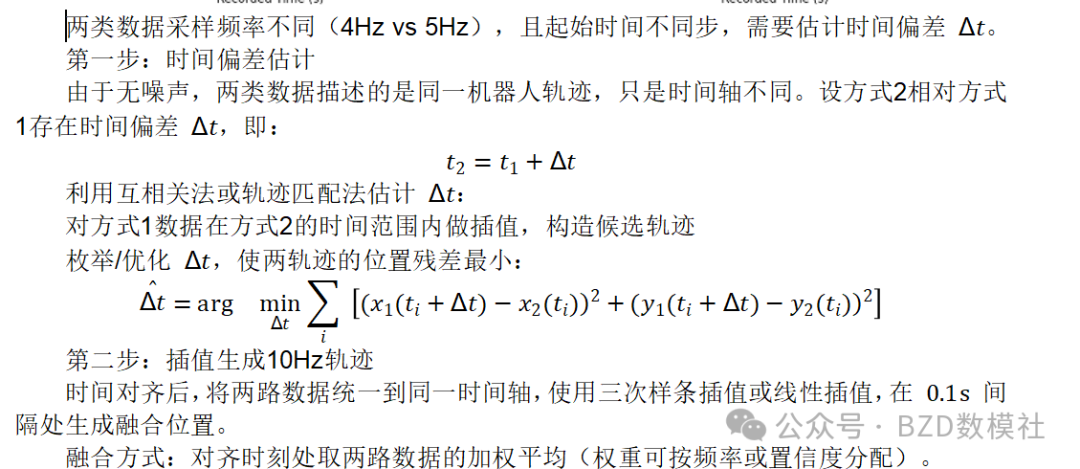
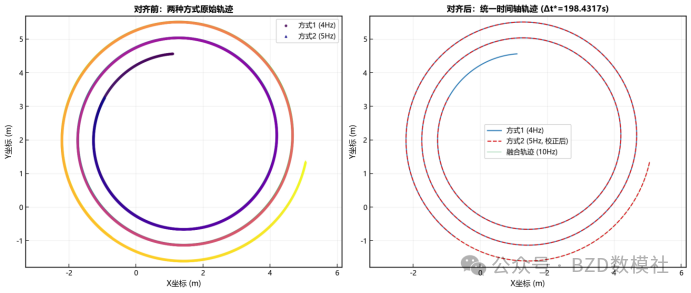
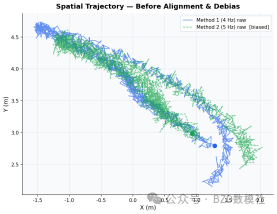
问题一:无噪声数据的时间对齐
问题1附件1两类数据在采集过程中无噪声影响,但存在设备开机的先后不同,请建立两类数据的时间对齐模型,并给出两种方式的时间偏差及10Hz的位置轨迹。
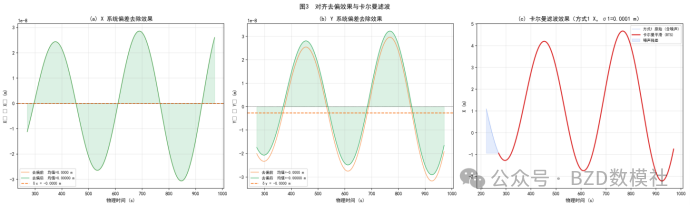
问题二:含噪声与系统偏差的数据对齐与融合
问题2附件2两类数据存在随机测量噪声和固定的系统偏差,请建立数据对齐与融合模型,并给出两种方式的时间偏差和系统偏差,以及10Hz的位置轨迹。
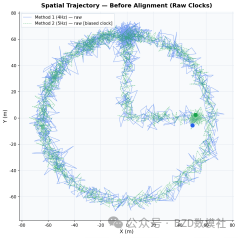
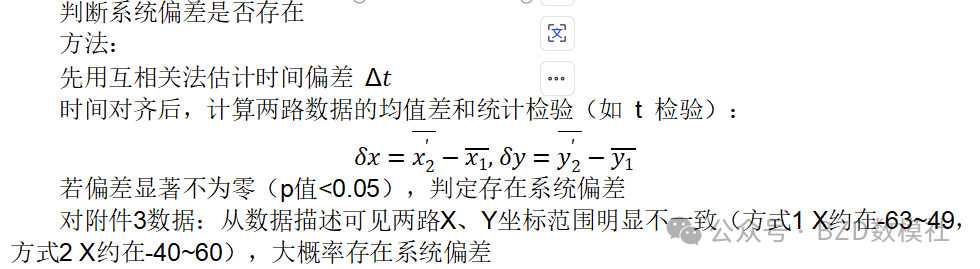
问题三:实际数据的系统偏差判断与融合
问题3附件3两类数据是实际测量数据,请判断是否存在系统偏差,在此基础上完成问题2的任务。
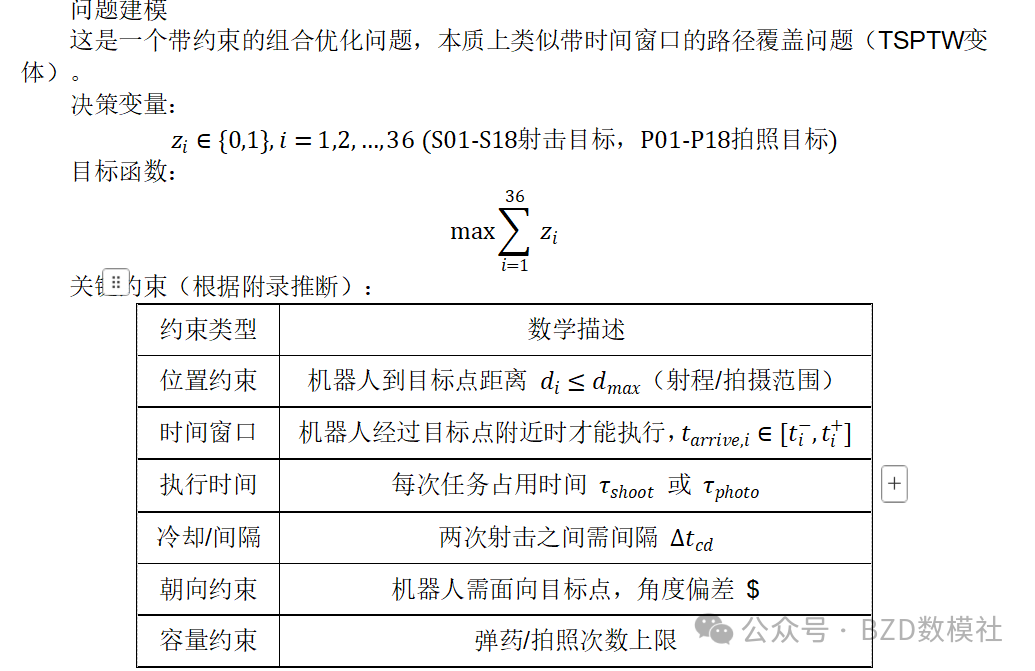
问题四:任务优化设计
问题4机器人按照附件3中的轨迹运动,在运动过程中需要对沿途目标点执行"模拟射击"或"拍照扫描"任务,目标点坐标见"附件4.xlsx"。