1.功能
8253定时器产生1KHz的脉冲,送给8259产生定时中断,中断中动态刷新8255的数码管显示,读入8255的按键,进行计数器的重置。
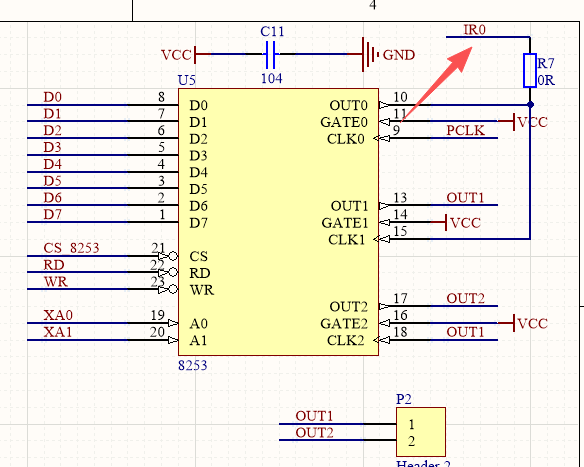
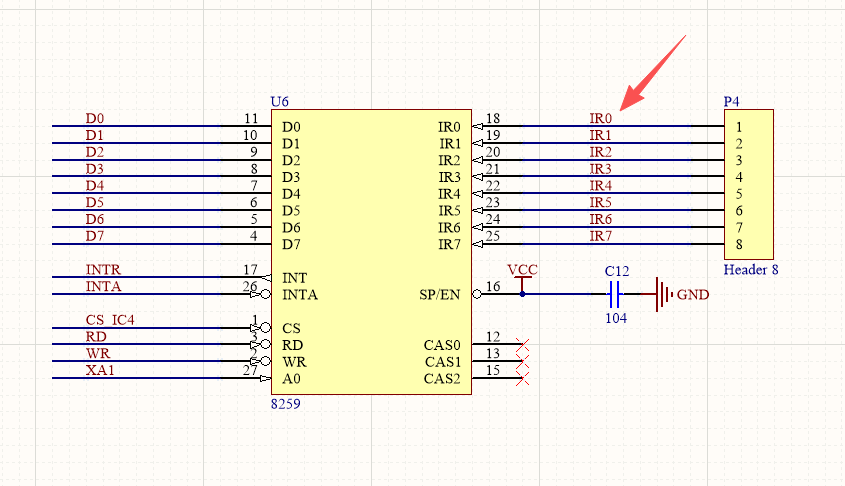
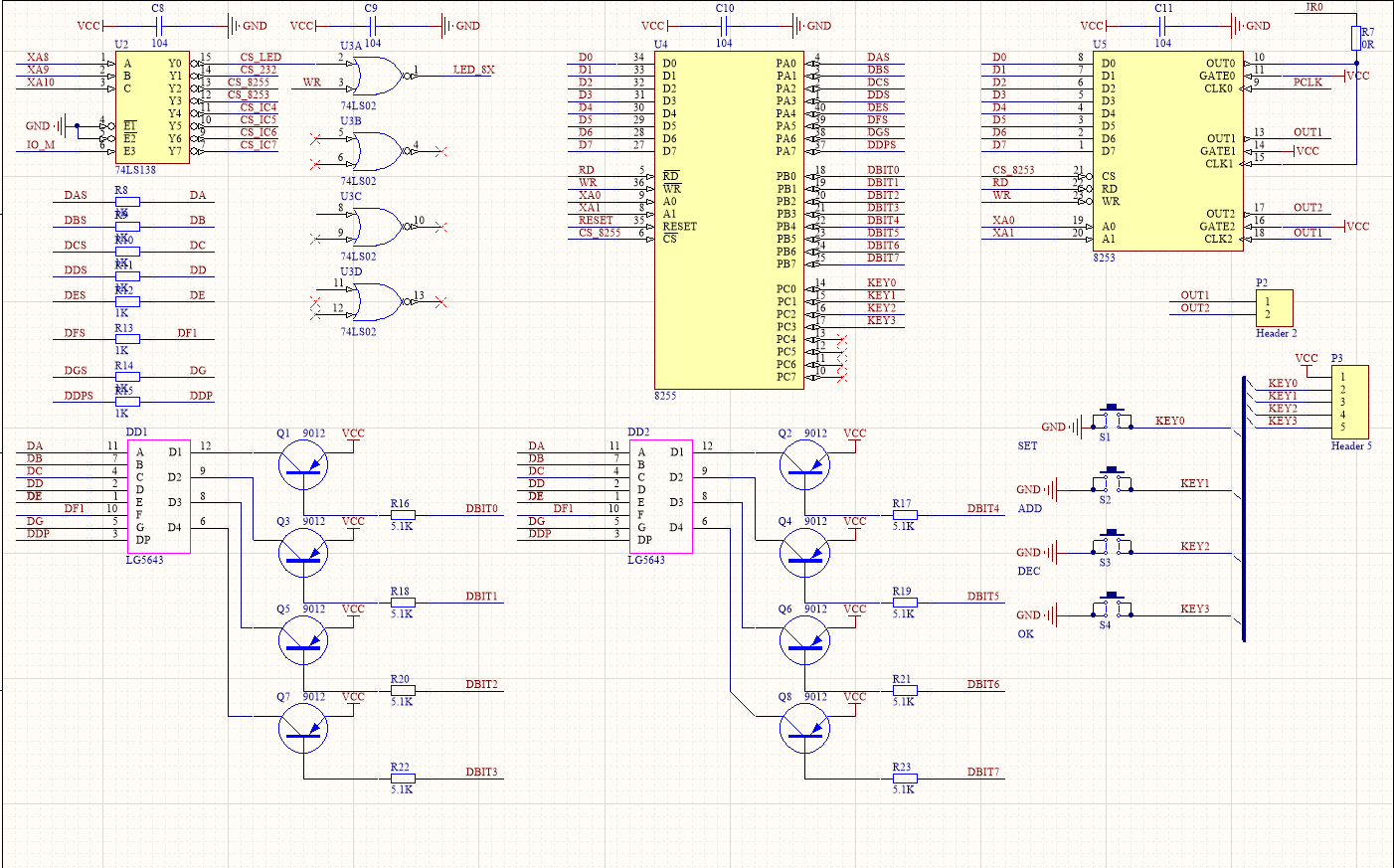
2.硬件
3.程序
cpp
#include "tiny_stdarg.h" // 使用自定义可变参数实现
#define ADR_273 0x0200
#define ADR_244 0x0400
#define LED_PORT 0x800
#define PC16550_THR 0x1f0
#define PC16550_LSR 0x1f5
/////////////////////////////////////////////////////////////////////////////////
//基本的IO操作函数
/////////////////////////////////////////////////////////////////////////////////
char str[]="Hello World! 20250531 Very Ok!!!\r\n";
//char buff[60]
char cx='A';
unsigned int cs_adr=0,ds_adr=0,ss_adr=0;
////////////////////////////////////////////////////////////////////////////////////
/// @brief
/// @param addr
/// @param data
void outp(unsigned int addr, char data)
// 输出一字节到I/O端口
{ __asm
{ mov dx, addr
mov al, data
out dx, al
}
}
char inp(unsigned int addr)
// 从I/O端口输入一字节
{ char result;
__asm
{ mov dx, addr
in al, dx
mov result, al
}
return result;
}
void register_read(void)
{
__asm
{
mov ax,CS
mov cs_adr,ax
mov ax,DS
mov ds_adr,ax
mov ax,SS
mov ss_adr,ax
}
}
////////////////////////////////////////////////////////////////////////////////////
//串口发送函数
////////////////////////////////////////////////////////////////////////////////////
void uart_send(char x)
{
int temp;
while(1)
{
temp=inp(PC16550_LSR);
if((temp&0x20)==0x20)
{
break;
}
}
outp(PC16550_THR,x);
}
void uart_str_send(char *p)
{
//int i=0;
//char str1[20]="Hello World!\r\n";
//char *p;
//p=str1;
while(*p!='\0')
{
uart_send(*p);
p++;
}
/*
for(i=0;i<14;i++)
{
uart_send(str1[i]);
}
*/
}
///////////////////////////////////////////////////////////////////////////////////
/* sprintf()函数实现 */
/* tiny_sprintf.c */
#include "tiny_stdarg.h"
static void itoa(unsigned num, int base, char *out) {
char buf[6]; // 16位整数最大5位数字 + 结束符
char *p = buf;
int i = 0;
if (num == 0) {
*out++ = '0';
*out = '\0';
return;
}
while (num > 0) {
int r = num % base;
*p++ = (r < 10) ? (r + '0') : (r - 10 + 'a');
num /= base;
i++;
}
while (i-- > 0) {
*out++ = *--p;
}
*out = '\0';
}
int tiny_sprintf(char *buf, const char *fmt, ...) {
va_list args;
char *p = buf;
const char *s = fmt;
va_start(args, fmt);
while (*s) {
if (*s != '%') {
*p++ = *s++;
continue;
}
s++;
switch (*s) {
case 'd': {
int num = va_arg(args, int);
if (num < 0) {
*p++ = '-';
num = -num;
}
itoa(num, 10, p);
while (*p) p++;
s++;
break;
}
case 'x': {
unsigned num = va_arg(args, unsigned);
itoa(num, 16, p);
while (*p) p++;
s++;
break;
}
case 's': {
char *str = va_arg(args, char *);
while (*str) *p++ = *str++;
s++;
break;
}
case 'c': {
char c = (char)va_arg(args, int);
*p++ = c;
s++;
break;
}
case '%': {
*p++ = '%';
s++;
break;
}
default: {
*p++ = '%';
*p++ = *s++;
break;
}
}
}
*p = '\0';
va_end(args);
return p - buf;
}
///////////////////////////////////////////////////////////////////////////////////
//NMI 中断
//////////////////////////////////////////////////////////////////////////////////
/* NMI 计数器 */
volatile unsigned char nmi_count =10;
//设置中断失量表
void set_int(unsigned char int_no, void * service_proc)
{ _asm
{ push es
xor ax, ax
mov es, ax
mov al, int_no
xor ah, ah
shl ax, 1
shl ax, 1
mov si, ax
mov ax, service_proc
mov es:[si], ax
inc si
inc si
mov bx, cs
mov es:[si], bx
pop es
}
}
//中断处理函数
/*
void _interrupt near nmi_handler(void)
{
nmi_count++;
}
*/
//////////////////////////////////////////////////////////////////////////////////
//8255
//////////////////////////////////////////////////////////////////////////////////
// 定义8255端口地址 (根据原理图译码确定)
#define PORT_8255_A 0x200 // PA端口地址
#define PORT_8255_B 0x201 // PB端口地址
#define PORT_8255_C 0x202 // PC端口地址
#define PORT_8255_CTRL 0x203 // 控制寄存器地址
// 数码管段码表 (共阴极)
unsigned char seg_codes[] = {
0x3F, // 0
0x06, // 1
0x5B, // 2
0x4F, // 3
0x66, // 4
0x6D, // 5
0x7D, // 6
0x07, // 7
0x7F, // 8
0x6F // 9
};
// 延时函数
void delay(unsigned int ms) {
for (unsigned int i = 0; i < ms; i++) {
for (unsigned int j = 0; j < 100; j++) {
// 空循环延时
}
}
}
// 初始化8255
void init_8255() {
// 控制字: 10000001 (0x81)
// A口输出, B口输出, C口输出
outp(PORT_8255_CTRL, 0x81);
}
// 显示8位数字
void display_numbers() {
unsigned char digits[] = {1, 2, 3, 4, 5, 6, 7, 8}; // 要显示的数字
while (1) { // 按任意键退出
for (int i = 0; i < 8; i++) {
// 设置位选 (选中当前位)
outp(PORT_8255_B, ~(1 << i));
// 设置段码
outp(PORT_8255_A, ~seg_codes[digits[i]]);
// 延时保持显示
delay(1);
// 关闭当前位显示 (消除鬼影)
outp(PORT_8255_A, 0x00);
}
}
}
//定时中断,8位数码管动态显示
//int ip_disp=0;
unsigned char digits[] = {1, 2, 3, 4, 5, 6, 7, 8}; // 要显示的数字
unsigned int cnt_run=0;
void disp_update(void)
{
cnt_run++;
digits[0]=digits[1]=digits[2]=0;
digits[3]=cnt_run/10000%10;
digits[4]=cnt_run/1000%10;
digits[5]=cnt_run/100%10;
digits[6]=cnt_run/10%10;
digits[7]=cnt_run%10;
}
void display_intr()
{
// unsigned char digits[] = {1, 2, 3, 4, 5, 6, 7, 8}; // 要显示的数字
static int ip_disp=0;
// 设置位选 (选中当前位)
outp(PORT_8255_B, ~(1 << ip_disp));
// 设置段码
outp(PORT_8255_A, ~seg_codes[digits[ip_disp]]);
//outp(PORT_8255_A, 0x06);
// 延时保持显示
delay(1);
// 关闭当前位显示 (消除鬼影)
//outp(PORT_8255_A, 0x00);
ip_disp++;
if(ip_disp>7)
{ip_disp=0;}
}
//////////////////////////////////////////////////////////////////////////////////
//8253 part
//////////////////////////////////////////////////////////////////////////////////
// 8253定时器端口定义
#define PORT_8253_CNT0 0x300 // 计数器0地址
#define PORT_8253_CNT1 0x301 // 计数器1地址
#define PORT_8253_CNT2 0x302 // 计数器2地址
#define PORT_8253_CTRL 0x303 // 控制寄存器地址
// 时钟频率定义 (根据原理图第4页)
#define PCLK_FREQUENCY 1193182 // 标准8253时钟频率(1.193182MHz)
//#define OUTPUT_FREQUENCY 200 // 目标输出频率(1kHz)
#define OUTPUT_FREQUENCY 180 // 目标输出频率(1kHz)
// 计算计数器初值
#define COUNTER_VALUE (unsigned int)(PCLK_FREQUENCY / OUTPUT_FREQUENCY)
// 初始化8253定时器
void init_8253() {
// 控制字: 00110110 (0x36)
// 选择计数器0 | 写入高低字节 | 模式3(方波) | 二进制计数
outp(PORT_8253_CTRL, 0x36);
// 写入计数器初值 (先低字节后高字节)
outp(PORT_8253_CNT0, COUNTER_VALUE & 0xFF); // 低字节
outp(PORT_8253_CNT0, (COUNTER_VALUE >> 8) & 0xFF); // 高字节
}
//////////////////////////////////////////////////////////////////////////////////
//8259 part
//////////////////////////////////////////////////////////////////////////////////
#define PIC1_CMD 0x400 // 命令端口 (A0=0)
#define PIC1_DATA 0x402 // 数据端口 (A0=1) !!!!!!!!!!
// 初始化8259(设置自动EOI)
void init_8259(void) {
// ICW1: 边沿触发 | 单片 | 需要ICW4
outp(PIC1_CMD, 0x17);
// ICW2: 中断向量基址=20h
outp(PIC1_DATA, 0x08);
// ICW4: 8086模式 | 自动EOI (0x03)
outp(PIC1_DATA, 0x0f); // 关键修改:设置自动EOI模式
// OCW1: 只允许IR0中断 (11111110b)
outp(PIC1_DATA, 0xfe);
}
//////////////////////////////////////////////////////////////////////////////////
//char end_flag[5]={0x55,0x55,0x55,0x55,0x55};
extern void nmi_handler(void);
void main(void)
/*检测按键状态并由LED发光二极管显示,
若按键闭合对应LED发光二极管点亮,
若按键断开对应LED发光二极管灭.*/
{
int i=0;
char buffer[80];
unsigned char key_code=0xff; // 使用安全格式化
//tiny_sprintf(buffer, "Hex: %x\n",255);
// 使用安全格式化
asm cli
tiny_sprintf(buffer,
"Decimal: %d \n"
"Hex: %x \n"
"String: %s \r\n",
-123,
0xABCD,
"Hello");
register_read();
//set_nmi_handler();
set_int(0x02, (void *)&nmi_handler);
set_int(0x08, (void *)&nmi_handler);//8259 与NMI共用一个中断服务函数
init_8255();
init_8253();
asm cli
init_8259();
asm nop
asm sti
while (1)
{
//char button_state;
//button_state=inp(ADR_244);
//int i=0;
//uart_str_send(str);
uart_str_send(buffer);
tiny_sprintf(buffer,"******************************************\r\n");
uart_str_send(buffer);
tiny_sprintf(buffer,"CS_ADR= 0X%x \r\n",cs_adr);
uart_str_send(buffer);
tiny_sprintf(buffer,"DS_ADR= 0X%x \r\n",ds_adr);
uart_str_send(buffer);
tiny_sprintf(buffer,"SS_ADR= 0X%x \r\n",ss_adr);
uart_str_send(buffer);
tiny_sprintf(buffer,"8259 Interrupt count=%d \r\n",nmi_count);
uart_str_send(buffer);
tiny_sprintf(buffer,"******************************************\r\n");
uart_str_send(buffer);
key_code=inp(PORT_8255_C)&0x0f;
if(key_code!=0x0f)
{cnt_run=0;}
tiny_sprintf(buffer,"Key_code= 0X%x \r\n",key_code);
uart_str_send(buffer);
//asm int 8
//uart_send(cx);
//display_intr();
for(i=0;i<5000;i++);
for(i=0;i<5000;i++);
outp(LED_PORT, 0xff);
for(i=0;i<5000;i++);
for(i=0;i<5000;i++);
outp(LED_PORT, 0x00);
disp_update();
//display_numbers();
}
}
char end_flag[5]={0x55,0x55,0x55,0x55,0x55};