【感知·yolov11】YOLOv11 部署踩坑录:为什么 INT8 量化后精度往往被直接"腰斩"??
导语 :在目标检测的圈子里,有一句让人心酸的顺口溜:"训练 mAP 猛如虎,一上实机二百五。"当你花了一周时间把 YOLOv11 调到最佳状态,满心欢喜地敲下
yolo export format=engine int8=True,准备在 Jetson Nano 或边缘盒子上大显身手时......现实往往会给你响亮的一耳光:速度确实起飞了,但满屏的检测框乱飞,原本能抓到的目标全丢了。今天,我们就来扒一扒,为什么原本好好的模型,一做 INT8 量化精度就"崩盘"?又该如何优雅地拯救量化后的 YOLOv11?
01 认知误区:INT8 量化真的只是一行命令的事儿吗?
许多刚接触模型部署的算法工程师,对量化(Quantization)存在一种危险的错觉:以为只要在导出 ONNX 或 TensorRT 时,顺手加上一个 int8=True 的参数,框架就会像变魔术一样,自动把模型体积缩小一半,速度翻倍,且精度几乎不掉。
然而,工程落地的现实是极其残酷的。

默认的训练后量化(PTQ, Post-Training Quantization)本质上是一次极其粗暴的"数据截断"。YOLOv11 的深层网络中存在大量的高频特征激活值(Activation),当你强行把原本细腻的 FP32(32位浮点数)硬塞进极度拥挤的 INT8(-128 到 127 的整数)空间时,如果截断策略(Calibration)做得不好,那些决定模型生死的关键特征就会直接丢失。
02 灾难溯源:YOLOv11 量化"崩盘"的罪魁祸首
为什么 YOLOv11 在做 INT8 量化时,比早期的 YOLO 版本更容易出现精度雪崩?原因主要集中在以下两点:
- 非对称激活值的灾难 :
YOLOv11 的网络结构中包含大量的 SiLU 或 Mish 等非线性激活函数,它们输出的特征分布往往存在严重的"长尾效应"(即极少数的值非常大,绝大多数值非常小)。如果你使用默认的线性量化策略(如 MinMax),为了包容那几个极大的值,整个 INT8 的表达空间会被严重拉扯,导致绝大多数正常的细粒度特征全部变成了"0"。 - 检测头(Head)的数值敏感性 :
YOLOv11 的 Head 部分需要回归极其精确的边界框坐标(Bounding Box)和类别概率。这部分对数值的精度极其敏感。如果在输出层也无脑施加 INT8 量化,坐标的微小量化误差会在最终的图像映射上被成倍放大,导致检测框直接"飘"到十万八千里外。
03 破局之道:拯救 INT8 精度的 3 大硬核策略
想要兼顾 INT8 的极致推理速度和 FP32 的高精度,我们需要收起那套"一键导出"的懒人思维,换上这套更极客的工程优化打法:
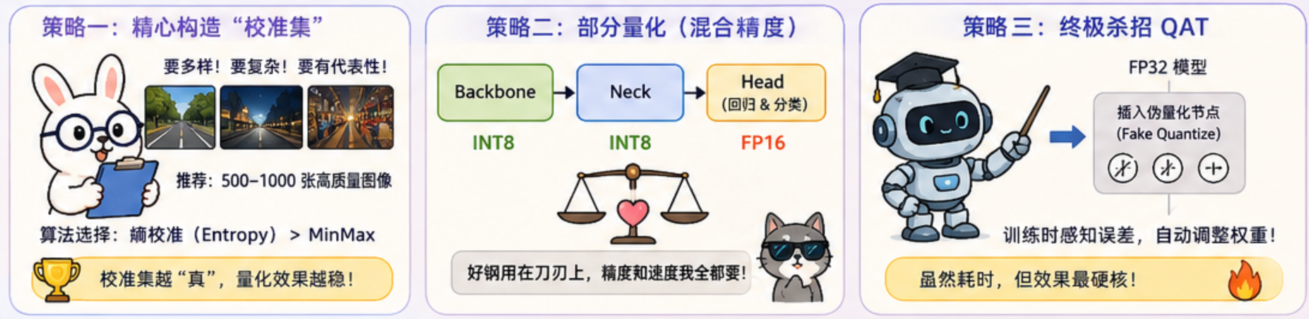
- 策略一:精心构造"校准集"(Calibration Dataset)
别再随便从训练集里抽 100 张图片敷衍了事了!校准集的作用是告诉量化器"真实数据的分布长什么样"。你应该精心挑选 500-1000 张包含了各种光照、各种目标尺度、背景最复杂的代表性图片。并且,推荐使用熵校准(Entropy Calibration)算法代替简单的 MinMax,它能更聪明地切掉极端异常值,保住核心特征。 - 策略二:采用"部分量化"(Partial Quantization / 混合精度)
好钢要用在刀刃上。既然检测头(Head)和某些特殊的拼接层对精度极其敏感,那我们为什么非要强迫它们变成 INT8 呢?
优化实战:在 TensorRT 部署时,手动将 Backbone 和大部分 Neck 设置为 INT8 以换取速度,而将最后几层回归坐标的卷积层强制保留在 FP16(半精度)。这种混合精度策略,往往能挽回 90% 以上丢失的 mAP,而速度损失微乎其微。 - 策略三:终极杀招 QAT(量化感知训练)
如果在尝试了所有 PTQ(训练后量化)手段后,你的小目标检测依然惨不忍睹,那就只能祭出终极武器:Quantization-Aware Training。
在 YOLOv11 训练的最后几个 Epoch,我们在 PyTorch 图中插入"伪量化节点"(Fake Quantize Nodes)。让模型在训练阶段就提前"体验"到量化带来的精度损失,并通过反向传播自动调整权重来适应这种误差。虽然耗时,但这几乎是榨干硬件算力的唯一真理。
💡 总结与避坑指南
总结一下,YOLOv11 的 INT8 部署绝对不是单纯的代码搬运,而是一场与数值分布和硬件特性博弈的艺术 。记住这个口诀:"校准集要精,敏感层要保,逼急了上 QAT "。
别再看着验证集上的高分沾沾自喜了,赶紧把模型导成 INT8 扔到板子上跑一跑,看看你到底是在做工程,还是在做 PPT 算法。
- 🔗 拓展阅读与硬核资源 :
- TensorRT 官方量化指南 :Achieving FP32 Accuracy for INT8 Inference Using Quantization Aware Training with NVIDIA TensorRT (深入理解 PTQ 熵校准与 QAT 的必读圣经)。
📚 往期推荐阅读
逃不开的小目标漏检:为什么 YOLOv11 频频丢失小目标?附 3 个实用的增强策略
被滥用的注意力机制:为什么 YOLOv11 改进,盲目塞满 Attention 反而成了"掉速刺客"
💬 深度探讨:
各位在把 YOLO 部署到边缘端(如瑞芯微、Jetson、地平线)时,遇到过最离谱的"量化翻车"事故是什么?最后是怎么把精度捞回来的?欢迎在评论区分享你的填坑血泪史!