YOLO v11蚊子数据集训练
一、项目概述
本项目基于YOLO v11深度学习模型,实现蚊子的实时检测与识别。本文旨在演示数据 训练过程。
二、数据集获取与准备
数据集获取
数据集已经上传到 yolov11蚊子检测数据集,连接地址
https://download.csdn.net/download/m0_67097444/92916784
数据集格式
YOLO格式数据集结构
YOLO标注格式说明:
每行格式:class_id center_x center_y width height
坐标为归一化值(0-1)
0 0.5 0.5 0.3 0.4
三、YOLO v11模型训练训练配置文件
创建data.yaml配置文件:
train: D:/yolo-v12/yolov12-main/datasets/train/images
val: D:/yolo-v12/yolov12-main/datasets/valid/images
test: D:/yolo-v12/yolov12-main/datasets/test/images
nc: 1 # Number of classes
names: 'mosquito'
训练脚本
创建train.py训练脚本:
from ultralytics import YOLO
model = YOLO('ultralytics/cfg/models/v12/yolov12.yaml') # 加载预训练模型
model.load('D:/yolo-v12/model/yolov12n.pt')
results = model.train(
data='datasets/data.yaml',
# epochs=10,
# imgsz=640,
# batch=16,
# #device=0, # 使用GPU 0
# device='cpu', # 使用GPU 0
# optimizer='SGD',
# lr0=0.001)
epochs=10, #训练轮次总数
batch=16, #批量大小,即单次输入多少图片训练
imgsz=640, #训练图像尺寸
scale=0.5, # S:0.9; M:0.9; L:0.9; X:0.9 #增益因子缩放图像,模拟物体与摄像机的不同距离。
mosaic=1.0, #默认值
mixup=0.0, # S:0.05; M:0.15; L:0.15; X:0.2 #默认值
copy_paste=0.1, # S:0.15; M:0.4; L:0.5; X:0.6 #分割标签 进行复制和粘贴
device= 'cpu', #指定训练的计算设备,无nvidia显卡则改为 'cpu'
#以下为我添加的一些参数
optimizer='SGD', #训练使用优化器,可选 auto,SGD,Adam,AdamW 等
workers=8, #加载数据的工作线程数
amp= True, #True 或者 False, 解释为:自动混合精度(AMP) 训练
cache=False # True 在内存中缓存数据集图像,服务器推荐开启
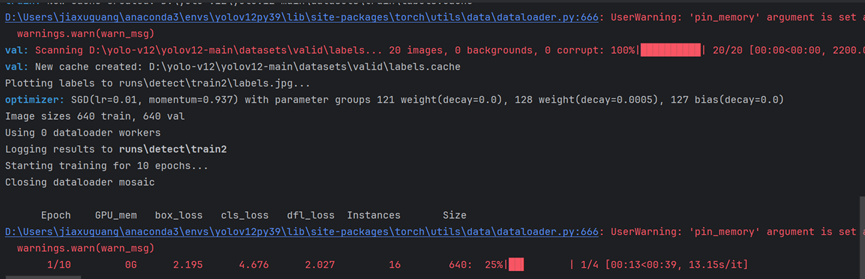
)训练过程
四、训练完成后,结果保存在best.pt中
五、数据集已经上传到 yolov11蚊子检测数据集,连接地址:https://download.csdn.net/download/m0_67097444/92916784