智慧农业|农田作物杂草识别数据集|航拍巡检|YOLO实例分割|深度学习训练集|智能除草视觉数据集
田间杂草与作物混生、光照复杂、尺度差异大,人工除草成本高、农药滥用污染重;传统CV模型泛化弱、分割不准,智能除草机器人、无人机巡检长期卡在高质量细粒度标注数据 缺口。本文带来一套可直接训练、覆盖真实田间场景的作物杂草实例分割数据集,附YOLOv8-seg工程化训练代码,开箱即用落地智慧农业视觉感知。10168

📁 项目总览
Agricultural-Weed-Crop-Segmentation-Dataset/
├── README.md # 数据集说明、使用指南、训练配置
├── data/
│ ├── images/ # 原始图像(JPG/PNG)
│ ├── labels/ # YOLO格式实例分割标注(TXT)
│ ├── train.txt
│ ├── val.txt
│ └── data.yaml # 模型训练配置文件
├── models/ # 预训练权重&训练产出权重
├── tools/ # 数据增强、格式转换、可视化脚本
└── train.py # 一键训练入口🧾 数据集核心信息
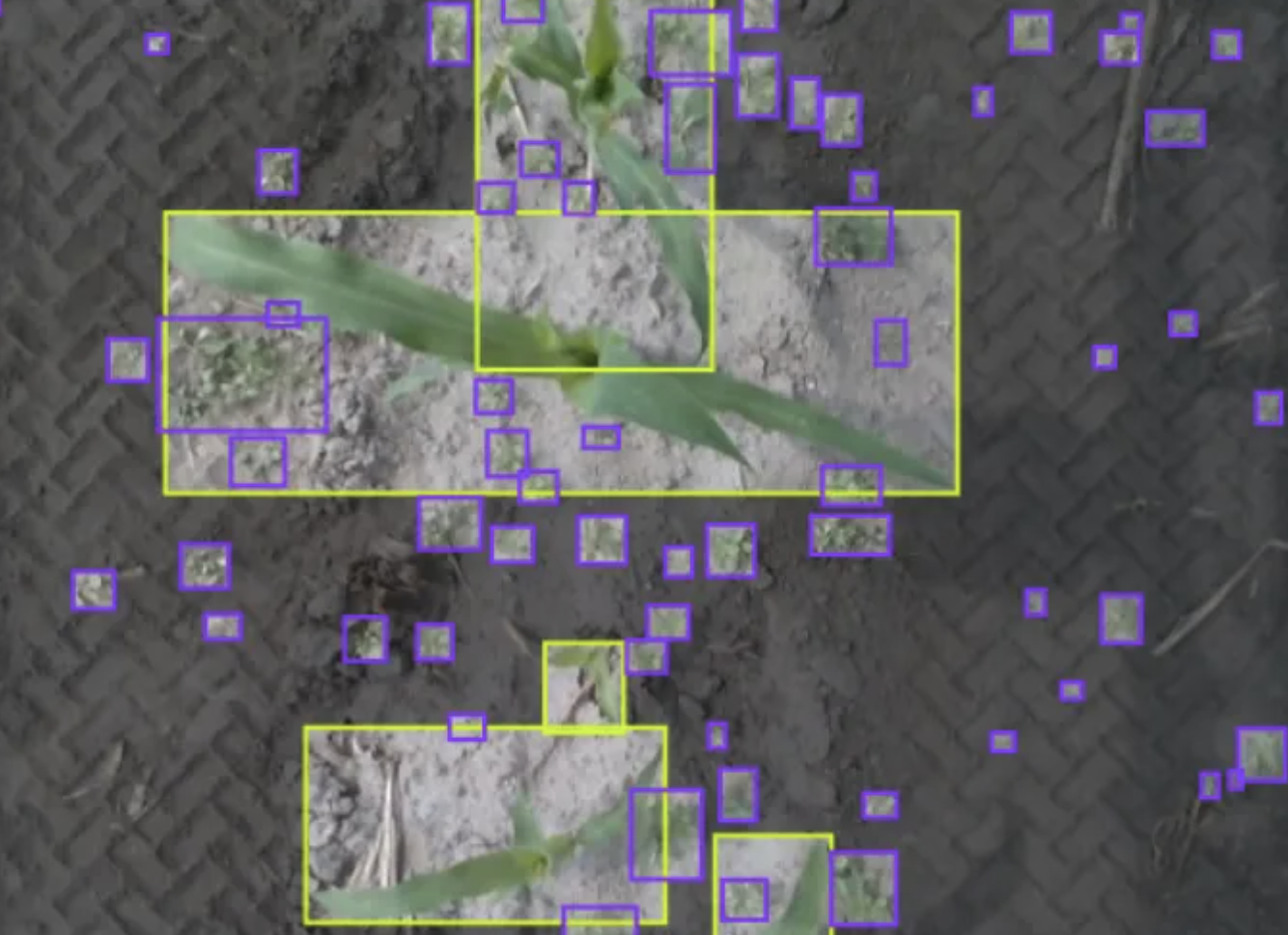
- 任务方向:实例分割 Instance Segmentation,精准像素级区分作物与杂草
- 标注类别:作物(crop)、杂草(weed)
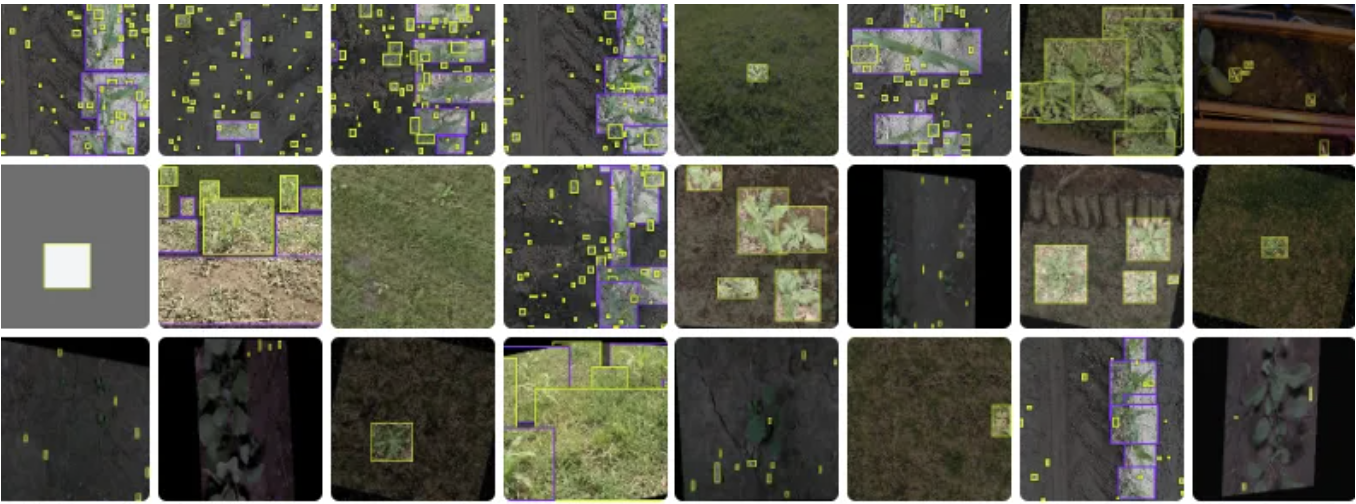
- 数据规模:16633张高精度标注图像,含2套细分场景子集,覆盖多生长期、多光照、多田间背景
- 数据格式:标准YOLO标注,图像+txt掩码,直接适配YOLOv5/v8/v10等检测/分割模型
- 采集场景:无人机航拍、近景巡检、田间贴脸实拍,贴合农机/无人机/机器人作业视角
- 应用价值:智能除草、变量喷药、作物长势监测、田间视觉巡检、杂草密度评估
📊 数据集关键指标
| 指标 | 详情 |
|---|---|
| 总图像数 | 16633 张 |
| 标注类别 | 2 类(作物/杂草) |
| 标注格式 | YOLO 实例分割(归一化掩码点) |
| 子集数量 | 2 个细分场景集 |
| 场景覆盖 | 强光/阴天/阴影、幼苗/成株、裸土/覆草 |
| 适配模型 | YOLOv8-seg、Mask R-CNN、SOLO、YOLOv10-seg |



🧠 深度思考:农业视觉数据为什么难?
- 类间相似度极高:杂草与作物同域、同色、同纹理,极易误检
- 尺度与遮挡极端:小目标密集、叶片重叠、冠层覆盖
- 环境扰动强:光照突变、露水反光、土壤色差、风致模糊
- 标注成本高:需农学背景+精细轮廓标注,人工成本数倍于通用场景
本数据集通过多场景均衡采样+精细实例掩码,从数据源头缓解上述痛点,显著提升模型泛化与鲁棒性。
🔧 YOLOv8-seg 训练代码
python
# -*- coding: utf-8 -*-
"""
智慧农业-作物杂草实例分割训练脚本
适配本数据集:农田航拍/近景巡检,小目标多、遮挡重、光照复杂
建议:imgsz=640+、epochs=120+、使用yolov8m-seg兼顾精度与速度
"""
from ultralytics import YOLO
import torch
def main():
# 1. 加载模型(农业小目标推荐m/l,避免n/s精度不足)
model = YOLO("yolov8m-seg.pt") # 中模型分割,平衡精度/速度/显存
# 2. 启动训练(农业场景专属参数)
model.train(
data="./data/data.yaml", # 本数据集配置路径
epochs=150, # 农业数据建议120--200轮
batch=32, # 按GPU显存调整(3090可64)
imgsz=640, # 640+提升小杂草/幼苗检出
device=0 if torch.cuda.is_available() else "cpu",
workers=8,
optimizer="AdamW", # 比SGD更稳,收敛更快
lr0=0.001,
lrf=0.01,
warmup_epochs=3,
cos_lr=True, # 余弦退火,减轻过拟合
patience=15, # 早停防止过训练
save=True,
plots=True,
# 农业图像专属增强(抑制过拟合、提升泛化)
hsv_h=0.1, # 色调扰动
hsv_s=0.3, # 饱和度扰动
hsv_v=0.3, # 亮度扰动
degrees=5, # 小角度旋转(避免植株失真)
flipud=0.1, # 上下翻转
fliplr=0.5, # 左右翻转
mosaic=0.8, # 高 mosaic 丰富组合场景
mixup=0.1, # 弱mixup,提升鲁棒性
# 任务关键参数
cls_pw=1.0, # 分类损失权重
obj_pw=1.0, # 置信度损失权重
mask_pw=1.5, # 分割掩码加权(提升轮廓精度)
overlap_mask=True,
iou=0.4, # 农业小目标建议0.3--0.5
)
# 3. 模型验证
model.val()
# 4. 导出部署格式(TensorRT/ONNX)
model.export(format="onnx", simplify=True, opset=17)
if __name__ == "__main__":
main()🧪 data.yaml 标准配置
yaml
# 智慧农业作物杂草实例分割数据集配置
path: ./data
train: images/train
val: images/val
names:
0: crop
1: weed
nc: 2✅ 为什么选择本数据集?
- 开箱即用:YOLO原生格式,解压即训,零格式转换成本
- 规模充足:1.6万+标注图,避免过拟合,泛化强
- 场景真实:航拍+近景+复杂光照,贴近农机/无人机落地环境
- 细粒度掩码:实例分割而非简单分类,支持精准除草、精准喷药
- 工程友好:配套训练代码、增强策略、部署导出,快速从数据集到Demo
🎯 典型落地场景
- 无人机农田巡检:杂草分布图、作物长势评估
- 智能除草机器人:实时分割→定位→机械/激光/喷雾除草
- 变量喷雾系统:只喷杂草区,减药80%+
- 田间监测IoT:边缘端智能识别,云端统计分析
📌 标签
#智慧农业 #数据集 #作物杂草识别 #实例分割 #YOLOv8 #计算机视觉 #深度学习 #智能除草 #无人机巡检 #农业AI #精准农业 #视觉数据集