文章目录
- 摘要
- [1 引言](#1 引言)
- [2 问题重述与总体假设](#2 问题重述与总体假设)
- [3 单电磁铁理想电磁力模型](#3 单电磁铁理想电磁力模型)
-
- [3.1 机理启发与候选模型](#3.1 机理启发与候选模型)
- [3.2 参数估计与模型选择](#3.2 参数估计与模型选择)
- [4 车体---悬浮架二自由度垂向动力学模型](#4 车体—悬浮架二自由度垂向动力学模型)
-
- [4.1 受力分析](#4.1 受力分析)
- [4.2 状态空间表达与初始条件](#4.2 状态空间表达与初始条件)
- [4.3 数值求解与悬浮间隙结果](#4.3 数值求解与悬浮间隙结果)
- [5 固定功率放大系数的整车级故障诊断](#5 固定功率放大系数的整车级故障诊断)
-
- [5.1 实际总电磁力反推](#5.1 实际总电磁力反推)
- [5.2 固定参数辨识与判定](#5.2 固定参数辨识与判定)
- [6 时变多通道功率放大器故障诊断](#6 时变多通道功率放大器故障诊断)
-
- [6.1 严格可辨识性分析](#6.1 严格可辨识性分析)
- [6.2 工程约束下的近似诊断模型](#6.2 工程约束下的近似诊断模型)
- [6.3 故障识别结果与解释](#6.3 故障识别结果与解释)
- [7 模型讨论与方法优势](#7 模型讨论与方法优势)
- [8 结论](#8 结论)
- 参考文献(根据已提供报告整理,正式投稿前请核对年卷期页码)
摘要
针对 2026 年数维杯 A 题"抱轨式磁浮列车的悬浮电磁铁故障检测问题",本文将四个小问整合为一条连续的建模链:首先,基于附件1理想实验数据建立单电磁铁理想电磁力模型;其次,建立车体---悬浮架二自由度垂向动力学方程,求解车体与悬浮架在 0 ∼ 10 s 0\sim10\ \mathrm{s} 0∼10 s 内的位移响应;再次,在全车 16 台电磁铁功率放大系数完全相同且固定不变的条件下,构造固定参数辨识模型,实现整车级功率放大器异常检测;最后,在功率放大系数随时间变化且各通道互不相关的条件下,引入可辨识性分析与滑动窗岭正则估计,实现多通道工程近似诊断。研究表明:单电磁铁理想电磁力可由符号机理修正模型
F ^ m i = 0.0800615393 I ∣ I ∣ z 2 − 25.4236000 \hat F_{mi}=0.0800615393\frac{I|I|}{z^2}-25.4236000 F^mi=0.0800615393z2I∣I∣−25.4236000
进行刻画,其拟合优度为 R 2 = 0.878800 R^2=0.878800 R2=0.878800;垂向动力学模型在数值求解后得到 9 s 9\ \mathrm{s} 9 s 时无接触约束悬浮间隙为 0.0811369416 m 0.0811369416\ \mathrm{m} 0.0811369416 m,若引入最大间隙几何约束,则物理可达间隙为 0.0600000000 m 0.0600000000\ \mathrm{m} 0.0600000000 m;固定功率放大系数辨识结果为 η ^ = 0.71198493 \hat\eta=0.71198493 η^=0.71198493,显著低于正常区间 0.8 , 1.2 0.8,1.2 0.8,1.2,说明整车存在输出衰减型异常;时变多通道场景下逐时刻严格不可唯一辨识,但在局部常值、平滑与少数故障先验下,可将 2 号与 3 号电磁铁识别为可靠故障通道,并将 14 号与 16 号列为可疑异常通道。本文方法兼顾机理一致性、参数可解释性与工程可实现性,可为磁浮列车悬浮系统的在线监测与故障诊断提供一种可复用的建模范式。
关键词: 抱轨式磁浮列车;悬浮电磁铁;垂向动力学;功率放大器故障;参数辨识;可辨识性分析
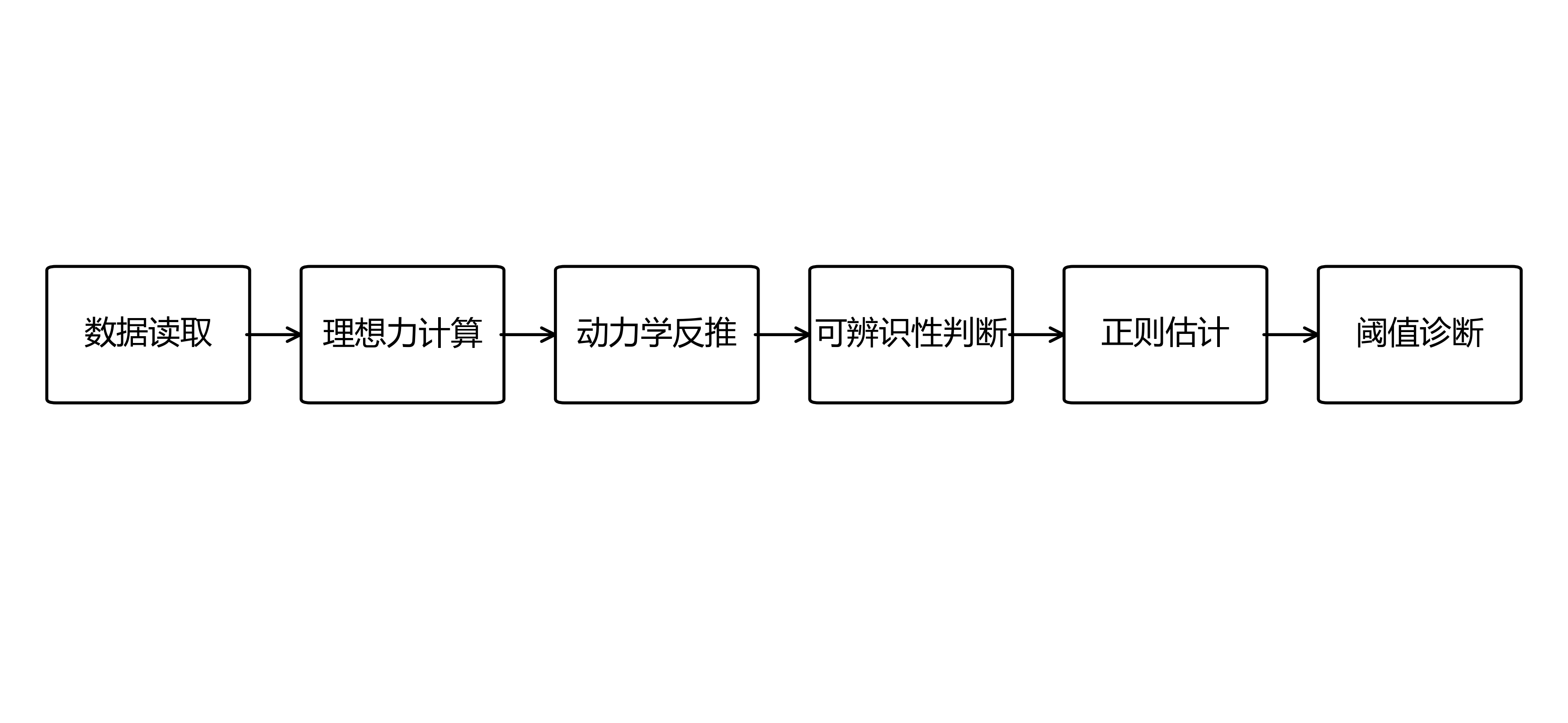
1 引言
抱轨式磁浮列车的核心在于悬浮系统对间隙、载荷与扰动的高精度响应。题目给出的四个小问并非彼此孤立:第1问回答"理想电磁力怎样建模",第2问回答"电磁力如何经悬浮架与空气弹簧传递为整车位移",第3问回答"在整车共用功率放大系数时如何诊断故障",第4问则进一步讨论"当各通道系数时变且互不相关时,哪些结论是可辨识的,哪些结论只能作工程近似"。因此,若将四问整合,最合理的技术路线应为

本文坚持"机理模型为主、数据修正为辅、统计判定兜底"的原则。相较于直接采用黑箱神经网络回归,该路线更符合竞赛题面已经给出物理关系与系统结构的特点,也更便于形成正式论文中的推导链条与图表体系。
2 问题重述与总体假设
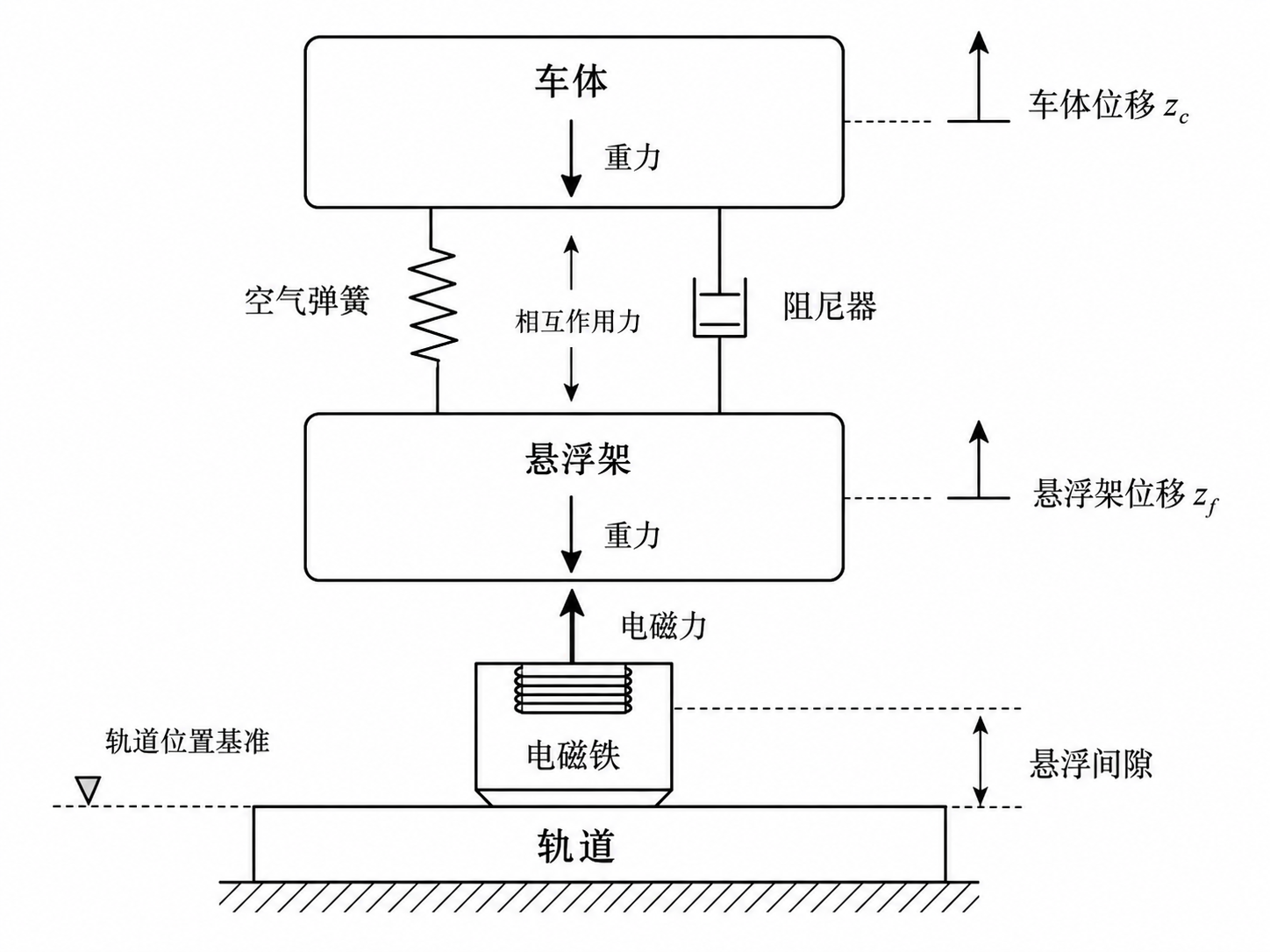
设车体质量为 m c = 33000 k g m_c=33000\ \mathrm{kg} mc=33000 kg,悬浮架本体质量为 3000 k g 3000\ \mathrm{kg} 3000 kg,单个电磁铁质量为 500 k g 500\ \mathrm{kg} 500 kg,空气弹簧刚度与阻尼分别为
k = 2 × 10 7 N / m , c = 8 × 10 4 N ⋅ s / m . k=2\times 10^7\ \mathrm{N/m},\qquad c=8\times 10^4\ \mathrm{N\cdot s/m}. k=2×107 N/m,c=8×104 N⋅s/m.
由于 16 台电磁铁固定于悬浮架并与其同位移、同速度,故悬浮架等效质量应取
m f = 3000 + 16 × 500 = 11000 k g . m_f=3000+16\times 500=11000\ \mathrm{kg}. mf=3000+16×500=11000 kg.
本文统一采用如下假设:
- 只研究单节列车垂向一维运动,忽略滚转、俯仰、偏航及横向扰动;
- 空气弹簧系统等效为线性弹簧---阻尼并联结构;
- 理想电磁力由电流与悬浮间隙决定,电流符号决定电磁力方向;
- 附件3、附件4中的监测噪声通过平滑微分与稳健估计处理;
- 第4问在不额外施加结构约束时严格不可唯一辨识,后续诊断均应表述为"约束下的工程近似结论"。
| 符号 | 含义 | 单位 | 说明 |
|---|---|---|---|
| I | 电磁铁电流 | A | 输入变量,带正负号,正号对应向上吸引力 |
| z | 悬浮间隙 | m | 输入变量,电磁铁上表面至轨道铁磁材料下表面的距离 |
| F | 实测电磁力 | N | 输出变量,带方向的垂向电磁力 |
| a | 电磁力比例系数 | N·m²/A² | 反映电磁铁与磁路结构的综合作用强度 |
| b | 截距修正项 | N | 反映传感器零偏或未建模常值误差 |
| e | 等效间隙偏置 | m | 反映边缘磁场、等效磁路长度或间隙零点偏差 |
3 单电磁铁理想电磁力模型
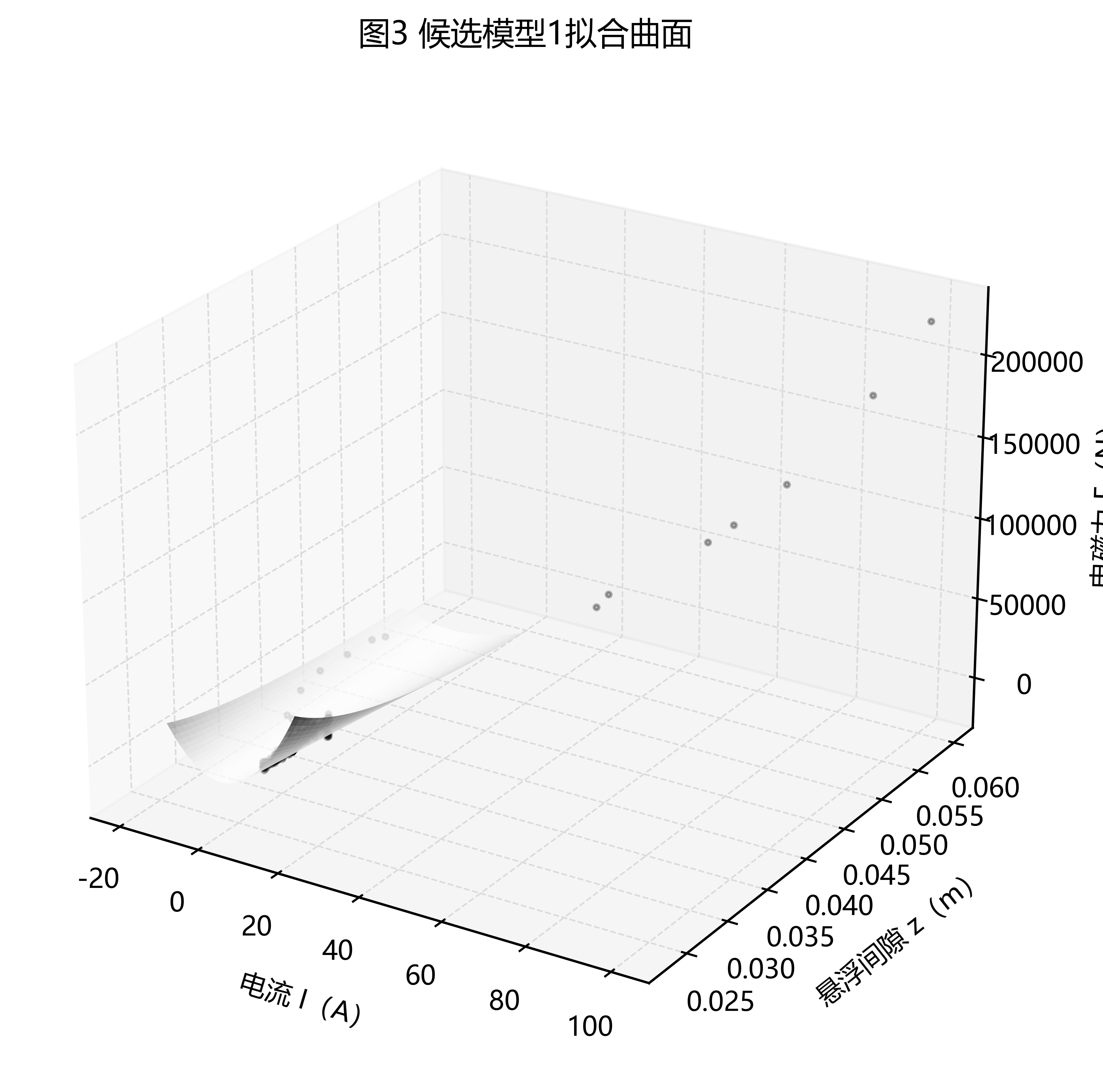
3.1 机理启发与候选模型
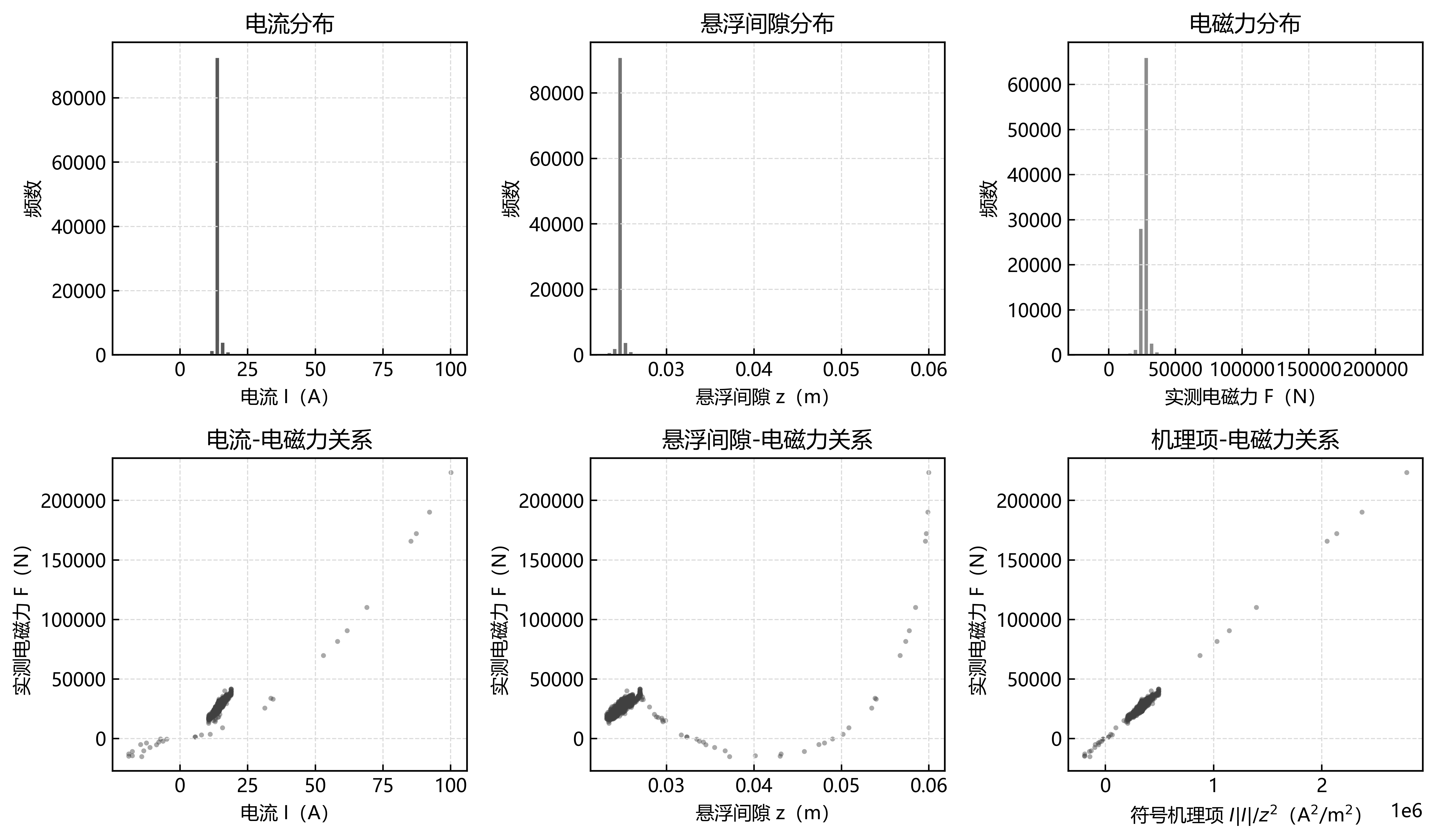
题面给出了单个电磁铁在理想情况下满足 F ∝ I 2 / z 2 F\propto I^2/z^2 F∝I2/z2 的物理启发。若只考虑幅值,则可写成
∣ F ∣ = a I 2 z 2 . |F|=a\frac{I^2}{z^2}. ∣F∣=az2I2.
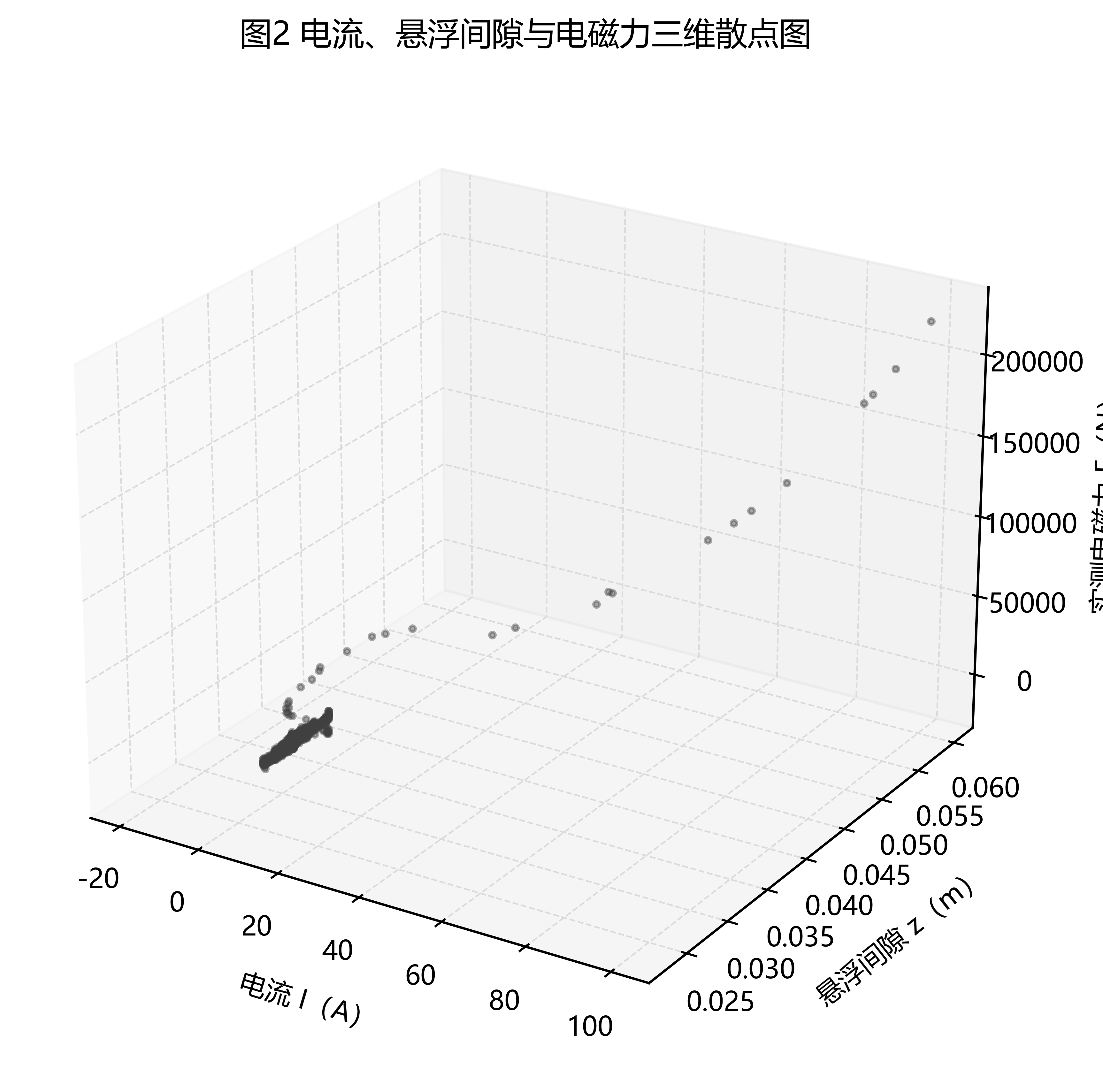
但由于电流正负决定电磁力方向,故有必要将 I 2 I^2 I2 推广为带符号的二次项 I ∣ I ∣ I|I| I∣I∣。据此可构造基础机理模型、带截距模型、广义幂律模型以及等效间隙修正模型。综合比较后,本文取符号机理修正模型为主模型:
F m i = a I ∣ I ∣ z 2 + b . F_{mi}=a\frac{I|I|}{z^2}+b. Fmi=az2I∣I∣+b.
其中,参数 a a a 反映磁路、线圈匝数与结构参数的综合比例效应,参数 b b b 则吸收零偏与未建模常值项。
3.2 参数估计与模型选择
采用非线性最小二乘估计参数,目标函数写为
S ( a , b ) = ∑ i = 1 n ( F i − a I i ∣ I i ∣ z i 2 − b ) 2 . S(a,b)=\sum_{i=1}^n\left(F_i-a\frac{I_i|I_i|}{z_i^2}-b\right)^2. S(a,b)=i=1∑n(Fi−azi2Ii∣Ii∣−b)2.
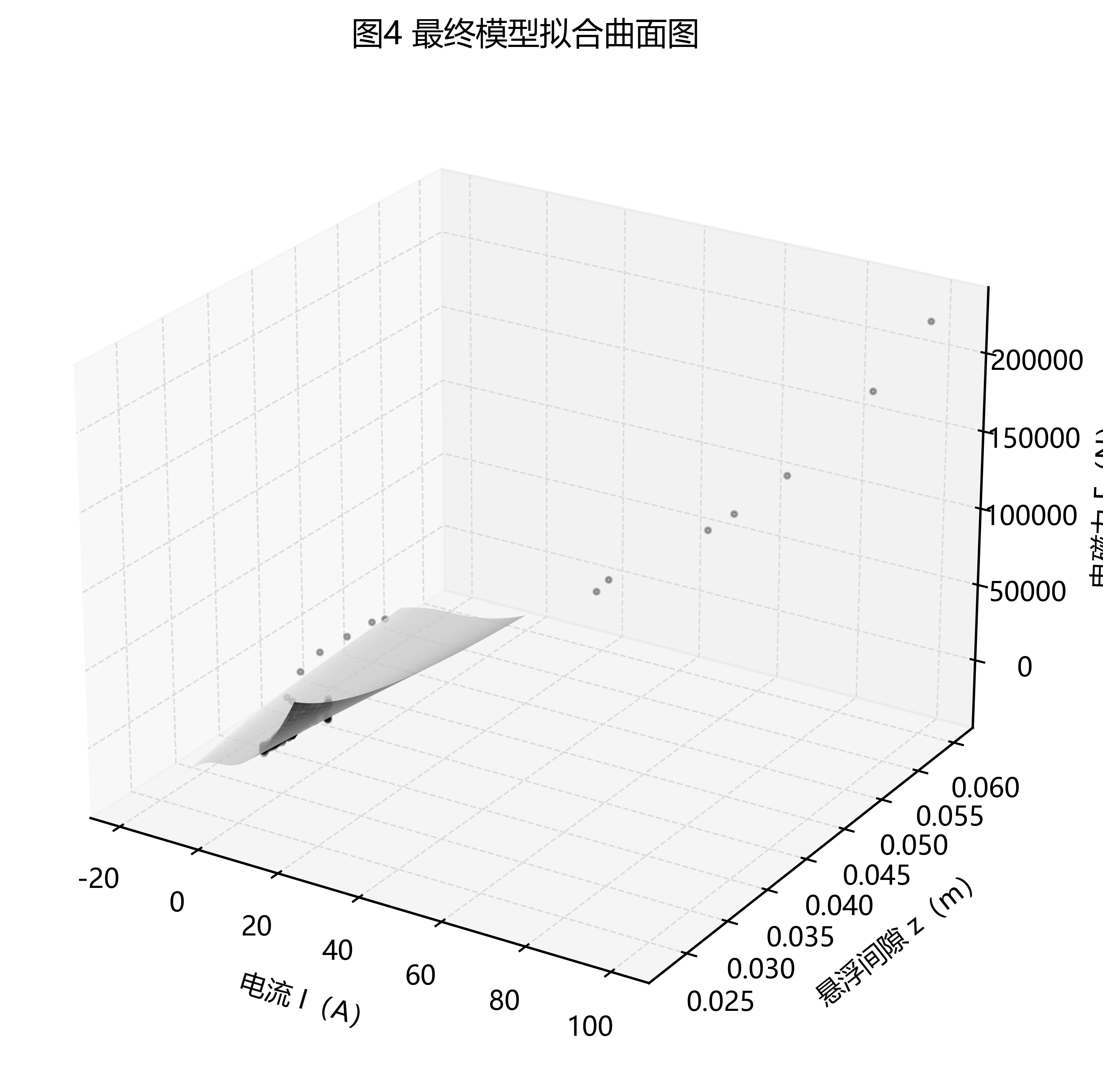
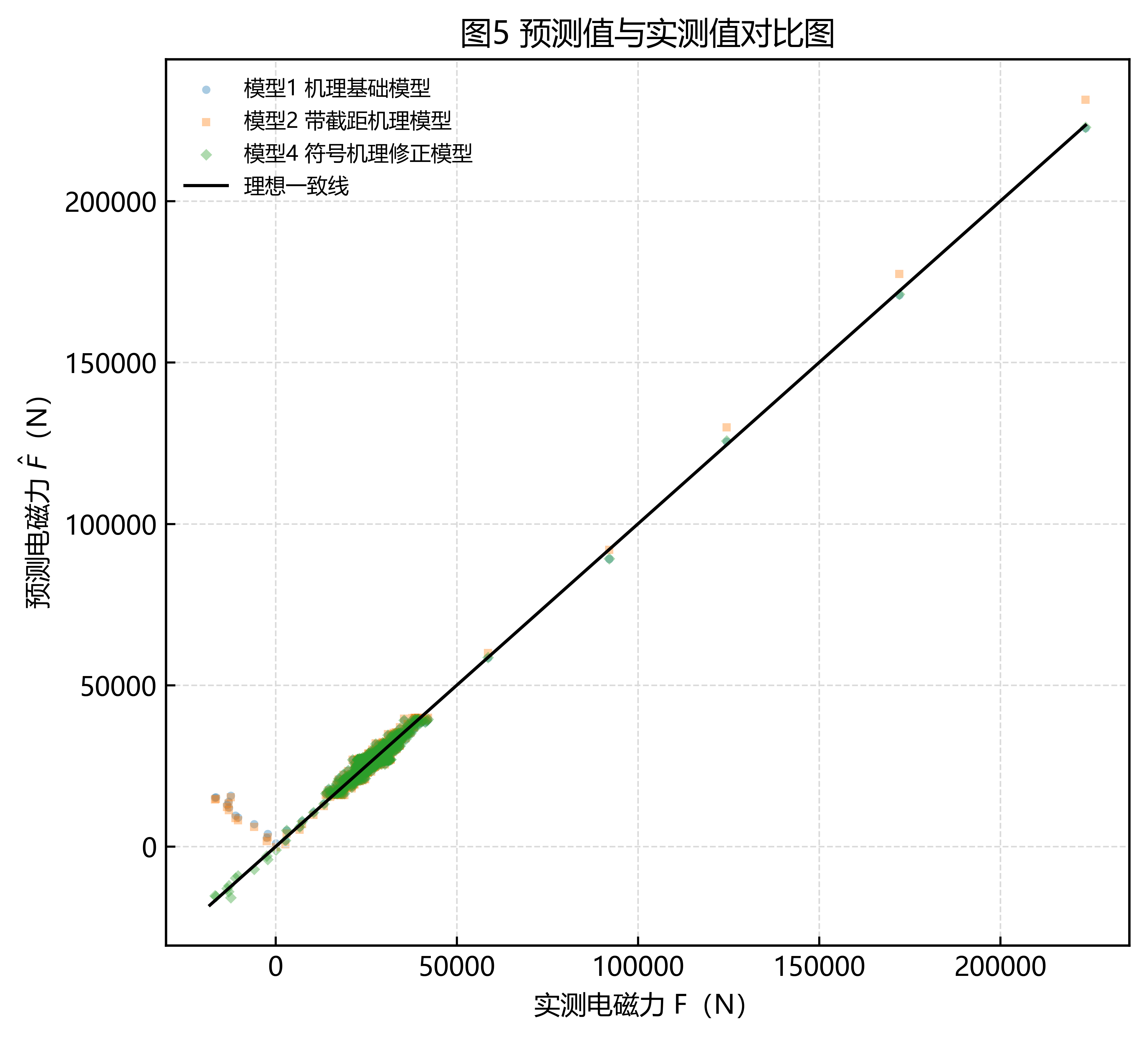
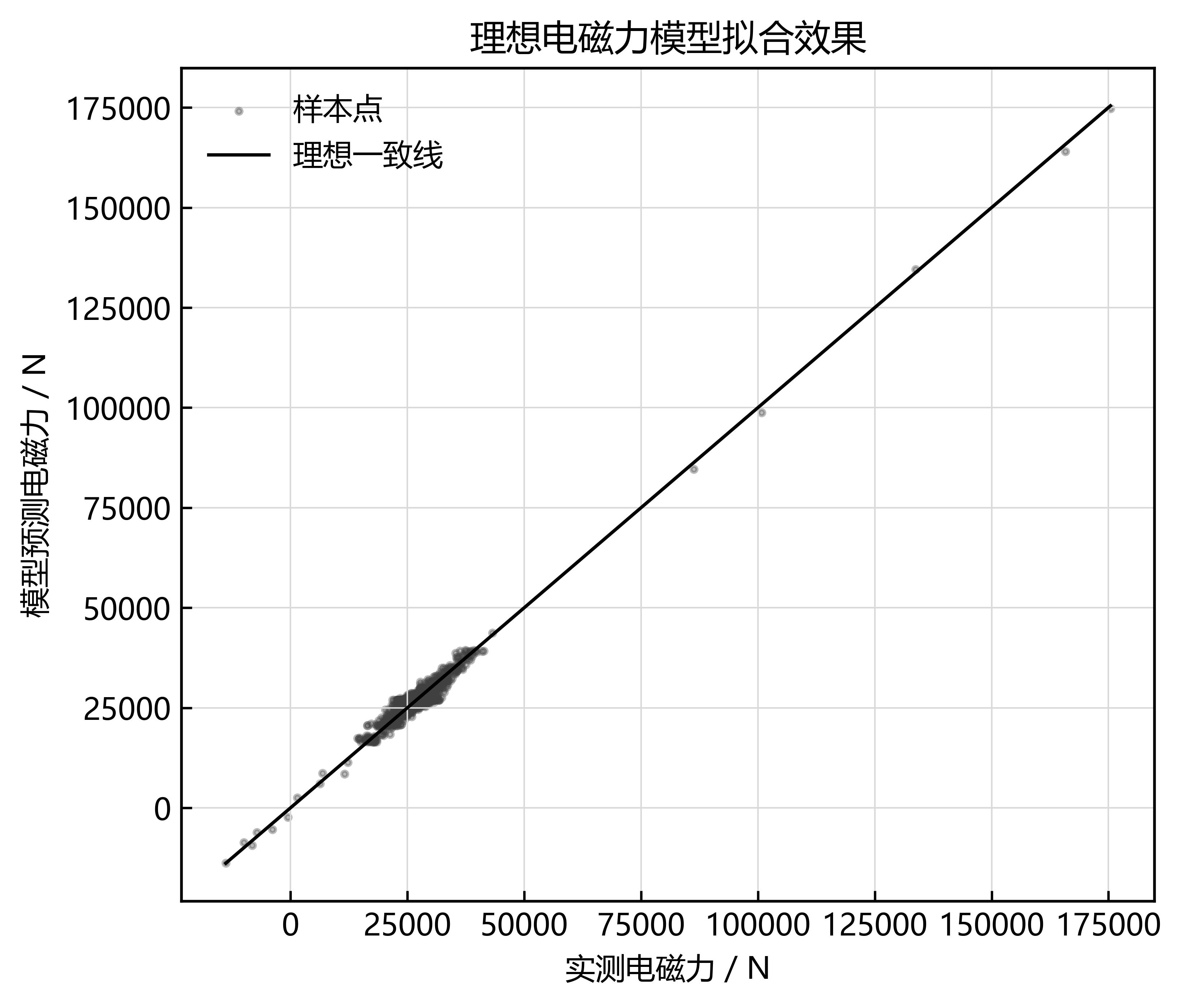
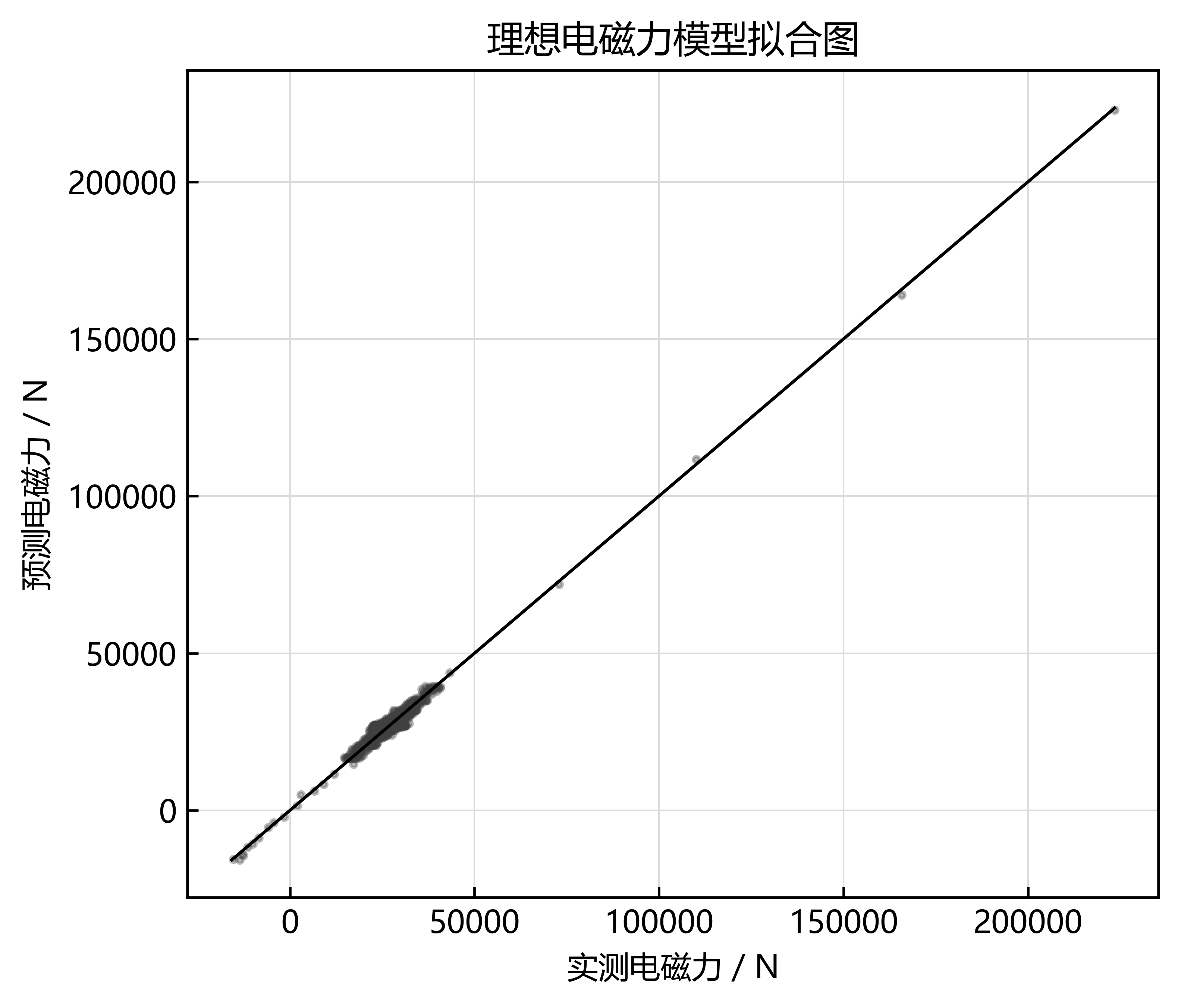
由报告给出的结果,最终主模型为
F ^ m i = 0.0800615393 I ∣ I ∣ z 2 − 25.4236000. \hat F_{mi}=0.0800615393\frac{I|I|}{z^2}-25.4236000. F^mi=0.0800615393z2I∣I∣−25.4236000.
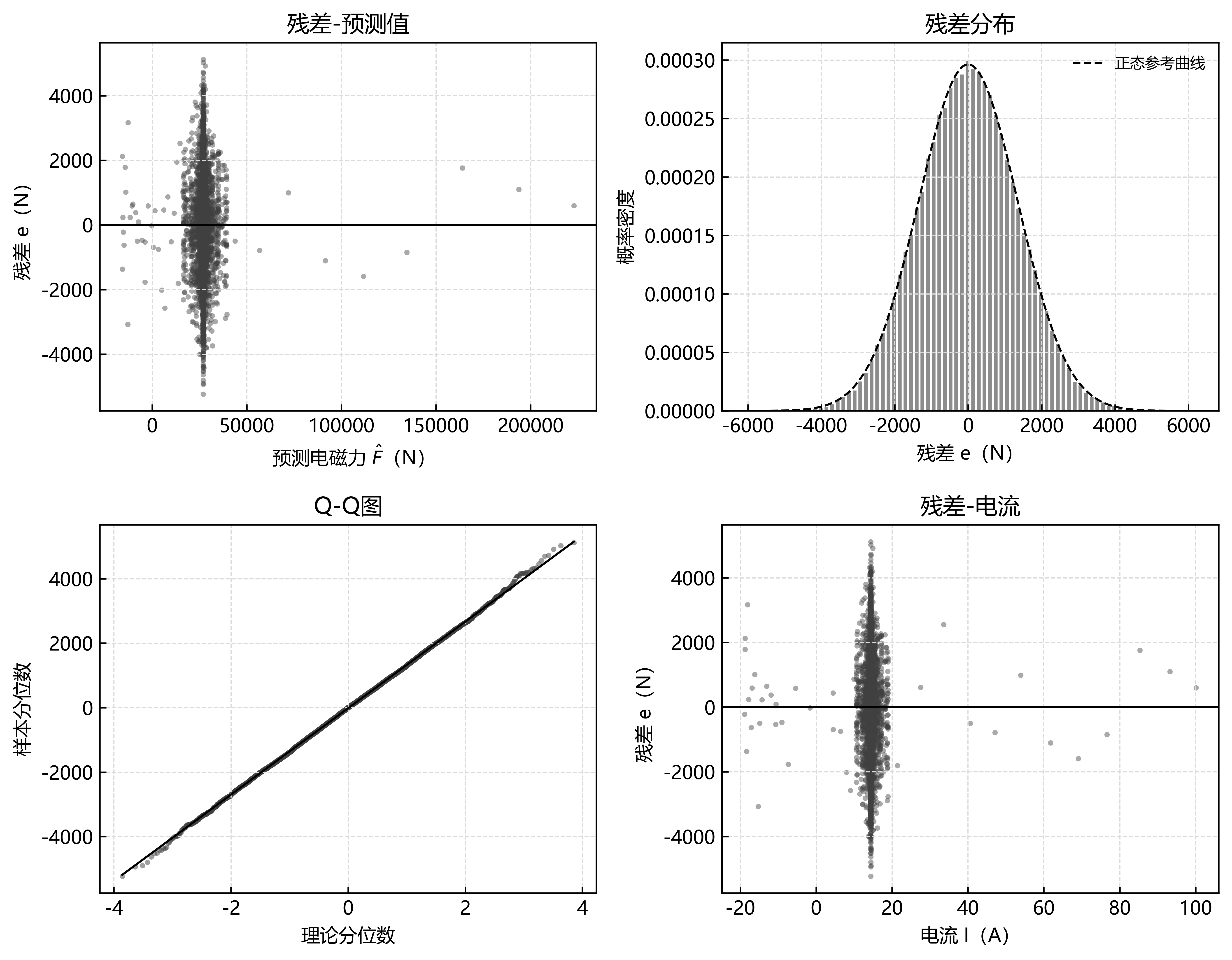
该模型的拟合指标为
R 2 = 0.878800 , R M S E = 1346.6616 N , M A E = 1074.9928 N . R^2=0.878800,\qquad \mathrm{RMSE}=1346.6616\ \mathrm{N},\qquad \mathrm{MAE}=1074.9928\ \mathrm{N}. R2=0.878800,RMSE=1346.6616 N,MAE=1074.9928 N.
同时,广义幂律模型给出的指数估计接近理论值 2 2 2 与 − 2 -2 −2,说明题面所给的 I 2 / z 2 I^2/z^2 I2/z2 关系在数据中得到了良好验证。相比之下,引入等效间隙偏置参数 e e e 虽可略微降低误差,但其置信区间跨过 0,且 BIC 并未支持额外参数的必要性,因此最终保留结构更简洁、解释更直接的符号机理修正模型。
| 变量 | 样本数 | 均值 | 标准差 | 最小值 | 下四分位数 | 中位数 | 上四分位数 | 最大值 |
|---|---|---|---|---|---|---|---|---|
| I | 99999.0 | 14.417285706979062 | 2.0231029047076654 | -18.875355444075 | 14.416717517110001 | 14.4170813606214 | 14.4174338616662 | 100.118679575791 |
| z | 99999.0 | 0.024917641385117234 | 0.00127051284775326 | 0.0231654981895871 | 0.0248393615288239 | 0.0248395061913524 | 0.0248397086643821 | 0.06 |
| F | 99999.0 | 26945.307439545737 | 3868.2102354811723 | -18138.5097533464 | 25920.8333362627 | 26948.3505360212 | 27961.562258743 | 223492.198513524 |
4 车体---悬浮架二自由度垂向动力学模型
4.1 受力分析
题面给出的空气弹簧对车体的作用力为
F k = − k ( z c − z f ) − c ( z ˙ c − z ˙ f ) . F_k=-k(z_c-z_f)-c(\dot z_c-\dot z_f). Fk=−k(zc−zf)−c(z˙c−z˙f).
车体受到空气弹簧力与重力作用,悬浮架受到空气弹簧反力、16 台电磁铁合力以及重力作用。设 16 台电磁铁合力为
F m ( t ) = ∑ i = 1 16 F i ( t ) . F_m(t)=\sum_{i=1}^{16}F_i(t). Fm(t)=i=1∑16Fi(t).
则车体与悬浮架的动力学方程分别为
m c z ¨ c = F k − m c g , m_c\ddot z_c=F_k-m_cg, mcz¨c=Fk−mcg,
m f z ¨ f = − F k + F m ( t ) − m f g . m_f\ddot z_f=-F_k+F_m(t)-m_fg. mfz¨f=−Fk+Fm(t)−mfg.
进一步代入 F k F_k Fk,得
m c z ¨ c = − k ( z c − z f ) − c ( z ˙ c − z ˙ f ) − m c g , m_c\ddot z_c=-k(z_c-z_f)-c(\dot z_c-\dot z_f)-m_cg, mcz¨c=−k(zc−zf)−c(z˙c−z˙f)−mcg,
m f z ¨ f = k ( z c − z f ) + c ( z ˙ c − z ˙ f ) + F m ( t ) − m f g . m_f\ddot z_f=k(z_c-z_f)+c(\dot z_c-\dot z_f)+F_m(t)-m_fg. mfz¨f=k(zc−zf)+c(z˙c−z˙f)+Fm(t)−mfg.
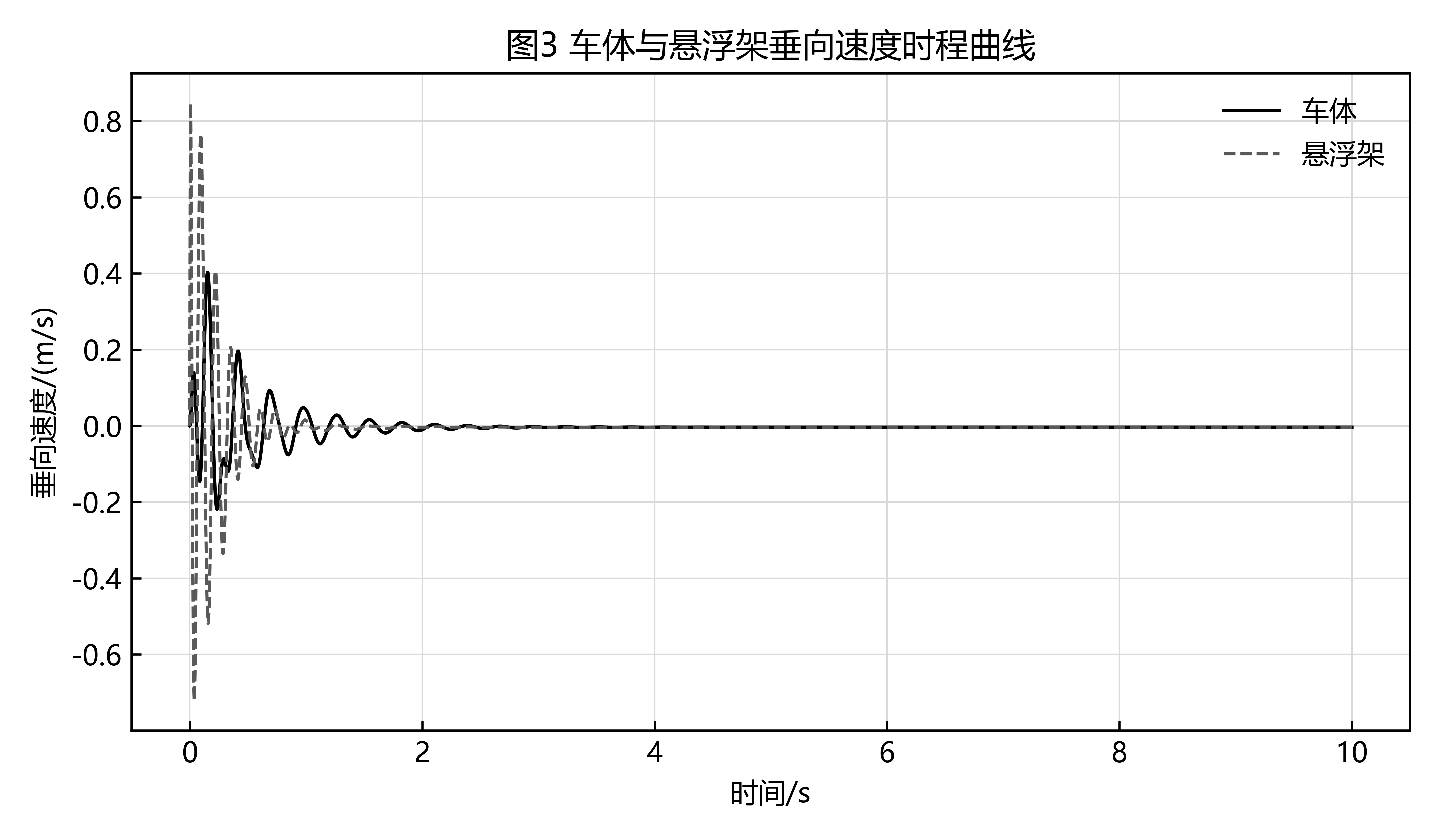
4.2 状态空间表达与初始条件
令状态变量
x 1 = z c , x 2 = z ˙ c , x 3 = z f , x 4 = z ˙ f , x_1=z_c,\quad x_2=\dot z_c,\quad x_3=z_f,\quad x_4=\dot z_f, x1=zc,x2=z˙c,x3=zf,x4=z˙f,
则系统的一阶状态方程为
x ˙ 1 = x 2 , \dot x_1=x_2, x˙1=x2,
x ˙ 2 = − k ( x 1 − x 3 ) − c ( x 2 − x 4 ) − m c g m c , \dot x_2=\frac{-k(x_1-x_3)-c(x_2-x_4)-m_cg}{m_c}, x˙2=mc−k(x1−x3)−c(x2−x4)−mcg,
x ˙ 3 = x 4 , \dot x_3=x_4, x˙3=x4,
x ˙ 4 = k ( x 1 − x 3 ) + c ( x 2 − x 4 ) + F m ( t ) − m f g m f . \dot x_4=\frac{k(x_1-x_3)+c(x_2-x_4)+F_m(t)-m_fg}{m_f}. x˙4=mfk(x1−x3)+c(x2−x4)+Fm(t)−mfg.
列车静止时满足 z f ( 0 ) = 0 z_f(0)=0 zf(0)=0、 z ˙ f ( 0 ) = 0 \dot z_f(0)=0 z˙f(0)=0、 z ˙ c ( 0 ) = 0 \dot z_c(0)=0 z˙c(0)=0。车体初始位移由静力平衡给出:
− k z c ( 0 ) = m c g , -kz_c(0)=m_cg, −kzc(0)=mcg,
故
z c ( 0 ) = − m c g k = − 0.01617000 m . z_c(0)=-\frac{m_cg}{k}=-0.01617000\ \mathrm{m}. zc(0)=−kmcg=−0.01617000 m.
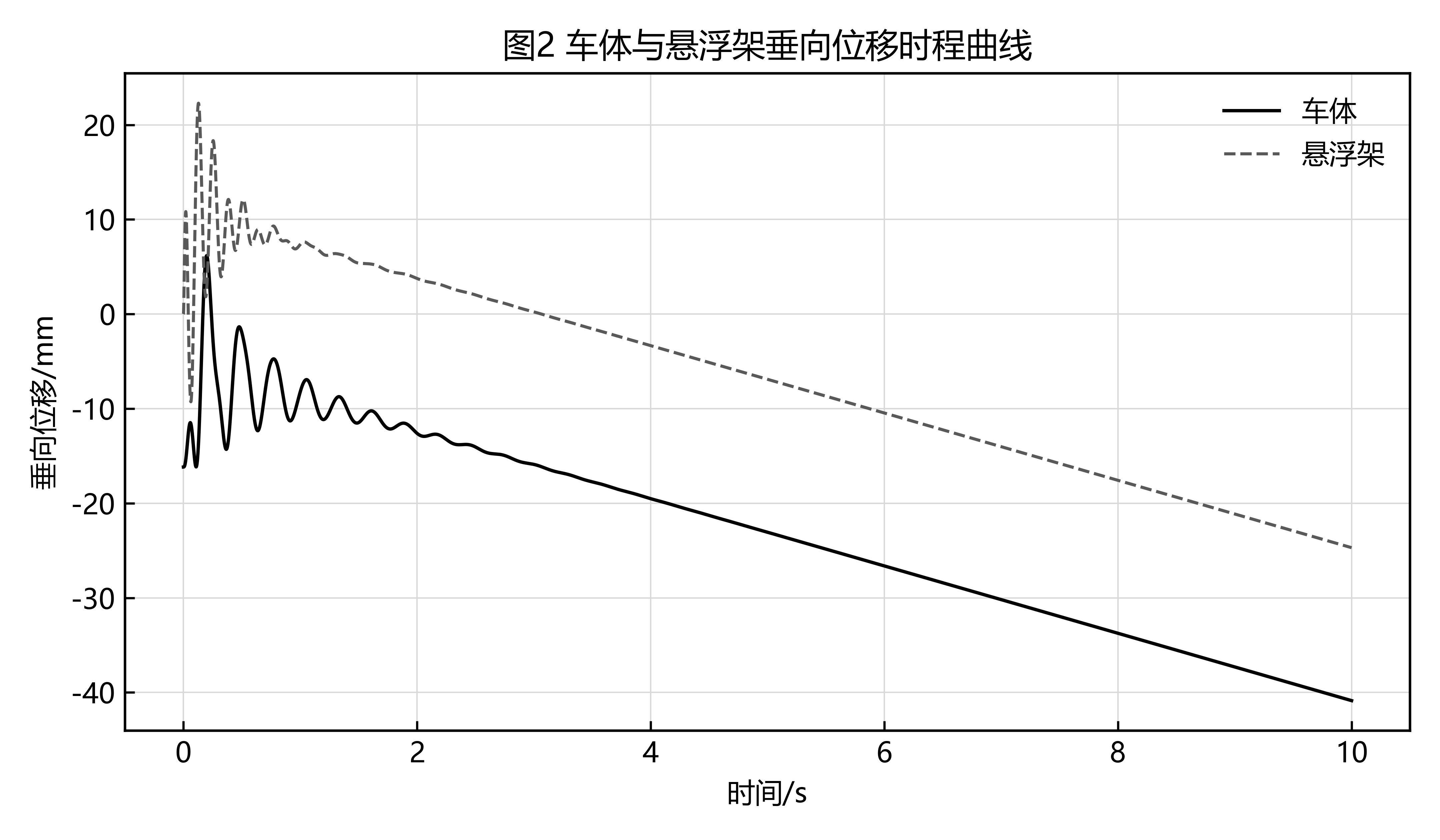
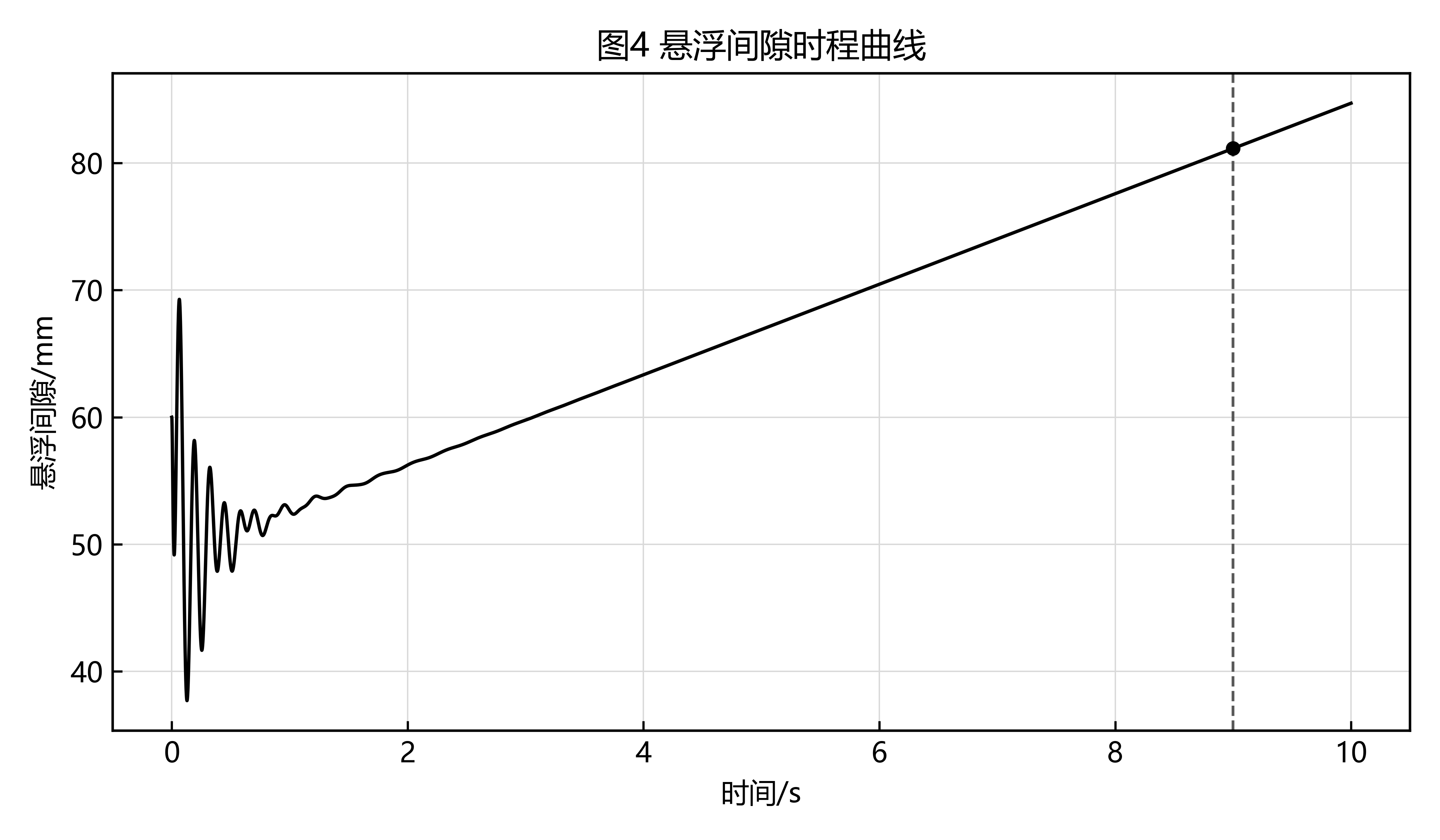
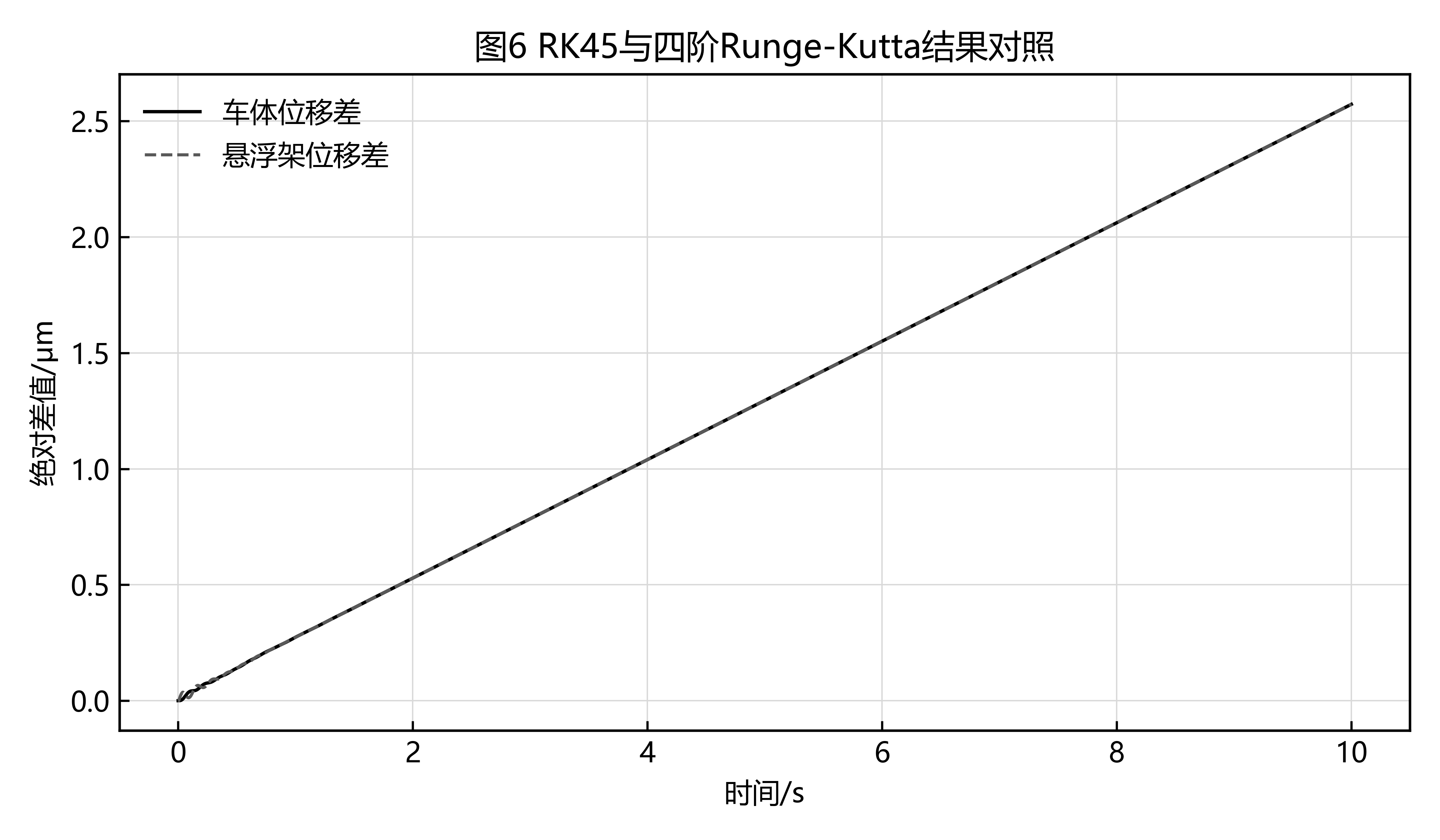
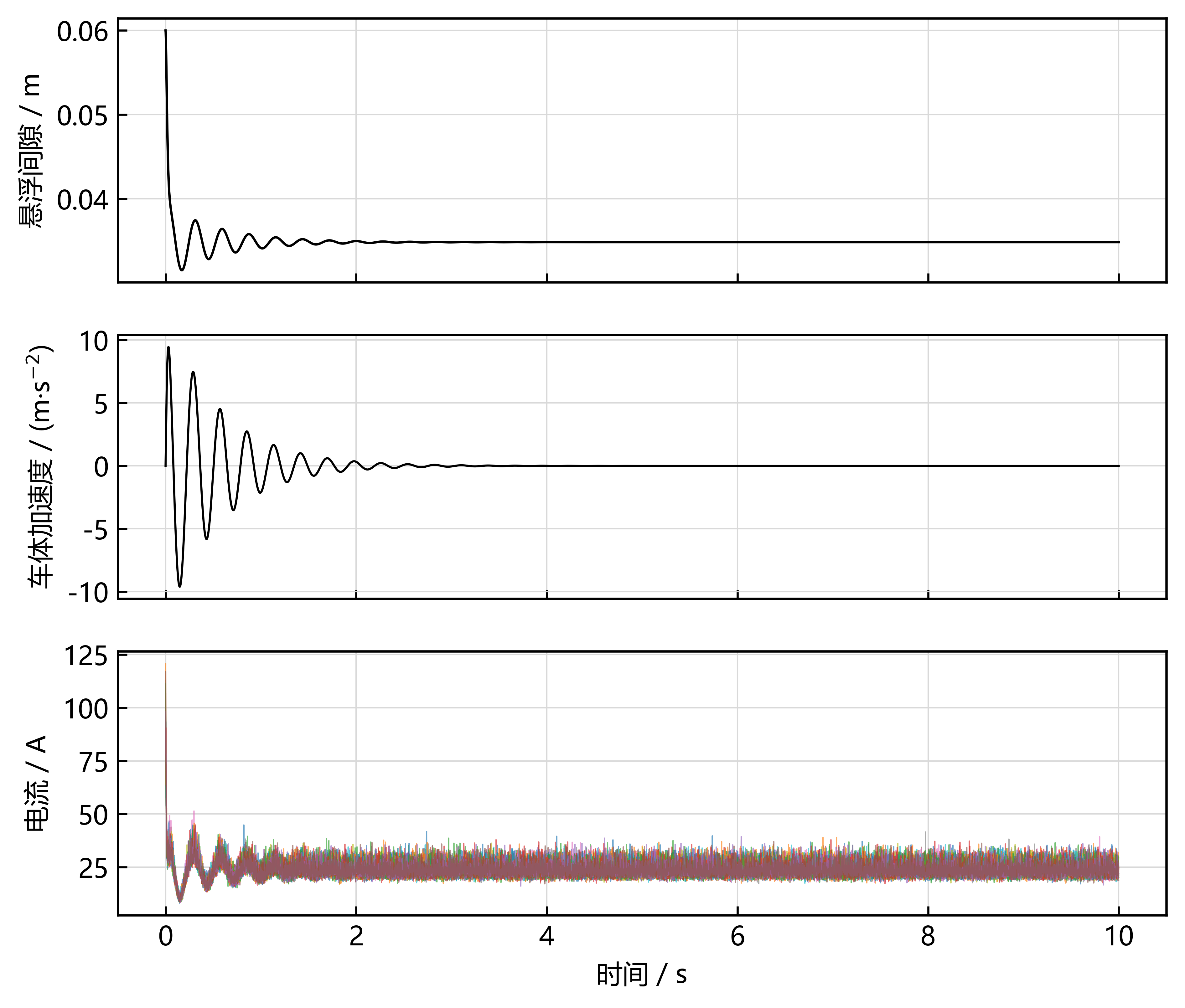
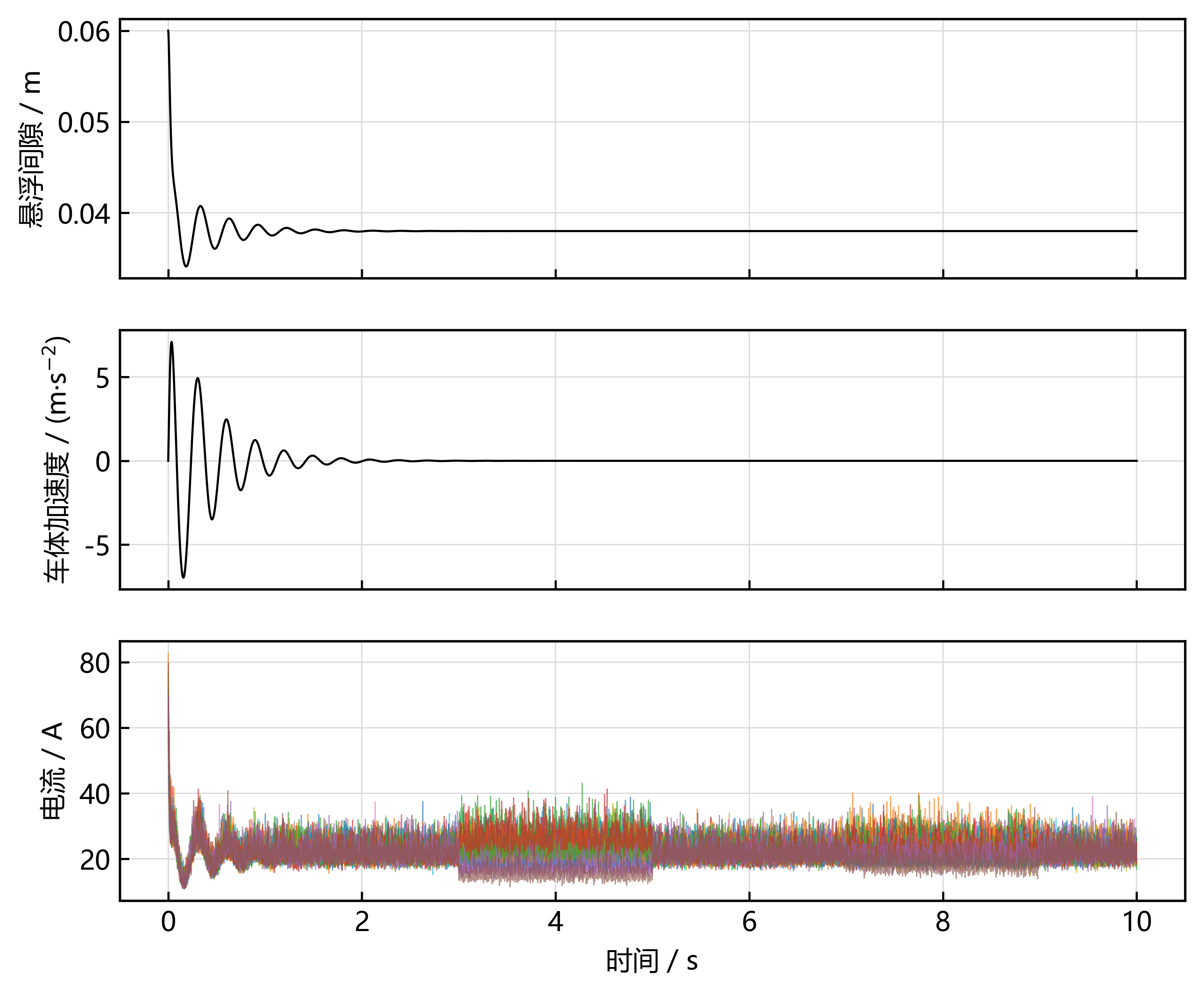
4.3 数值求解与悬浮间隙结果
在附件2给出的 16 路实际电磁力时序数据基础上,采用 RK45 与固定步长 RK4 进行交叉求解。结果表明,二者在 9 s 9\ \mathrm{s} 9 s 时的悬浮间隙差仅为 2.317 × 10 − 6 m 2.317\times10^{-6}\ \mathrm{m} 2.317×10−6 m,说明数值解稳定可靠。
悬浮间隙定义为轨道铁磁材料下表面与电磁铁上表面的距离,故有
z g a p ( t ) = 0.06 − z f ( t ) . z_{gap}(t)=0.06-z_f(t). zgap(t)=0.06−zf(t).
在 t = 9 s t=9\ \mathrm{s} t=9 s 时,报告给出的悬浮架位移为
z f ( 9 ) = − 0.0211369416 m , z_f(9)=-0.0211369416\ \mathrm{m}, zf(9)=−0.0211369416 m,
于是无接触约束下的悬浮间隙为
z g a p ( 9 ) = 0.06 − z f ( 9 ) = 0.0811369416 m = 81.136942 m m . z_{gap}(9)=0.06-z_f(9)=0.0811369416\ \mathrm{m}=81.136942\ \mathrm{mm}. zgap(9)=0.06−zf(9)=0.0811369416 m=81.136942 mm.
若进一步将"静止时最大间隙 0.06 m 0.06\ \mathrm{m} 0.06 m"解释为几何硬约束,则应取
z g a p , l i m ( 9 ) = min { 0.06 , z g a p ( 9 ) } = 0.0600000000 m . z_{gap,lim}(9)=\min\{0.06,\ z_{gap}(9)\}=0.0600000000\ \mathrm{m}. zgap,lim(9)=min{0.06, zgap(9)}=0.0600000000 m.
也就是说,第2问在数学模型意义下给出了无接触约束的名义解,而在工程解释意义下还可给出带几何上界的物理解。
5 固定功率放大系数的整车级故障诊断
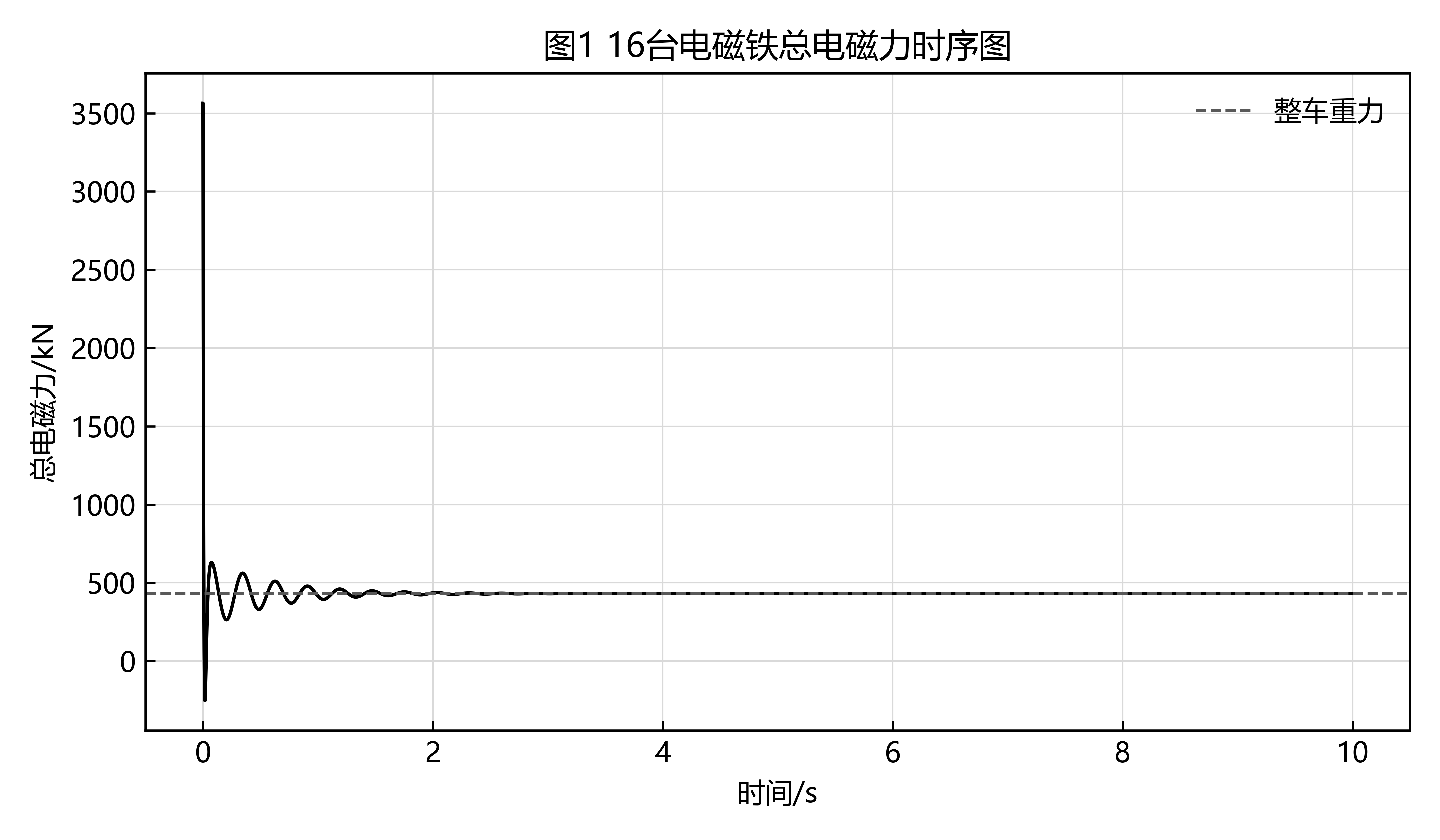
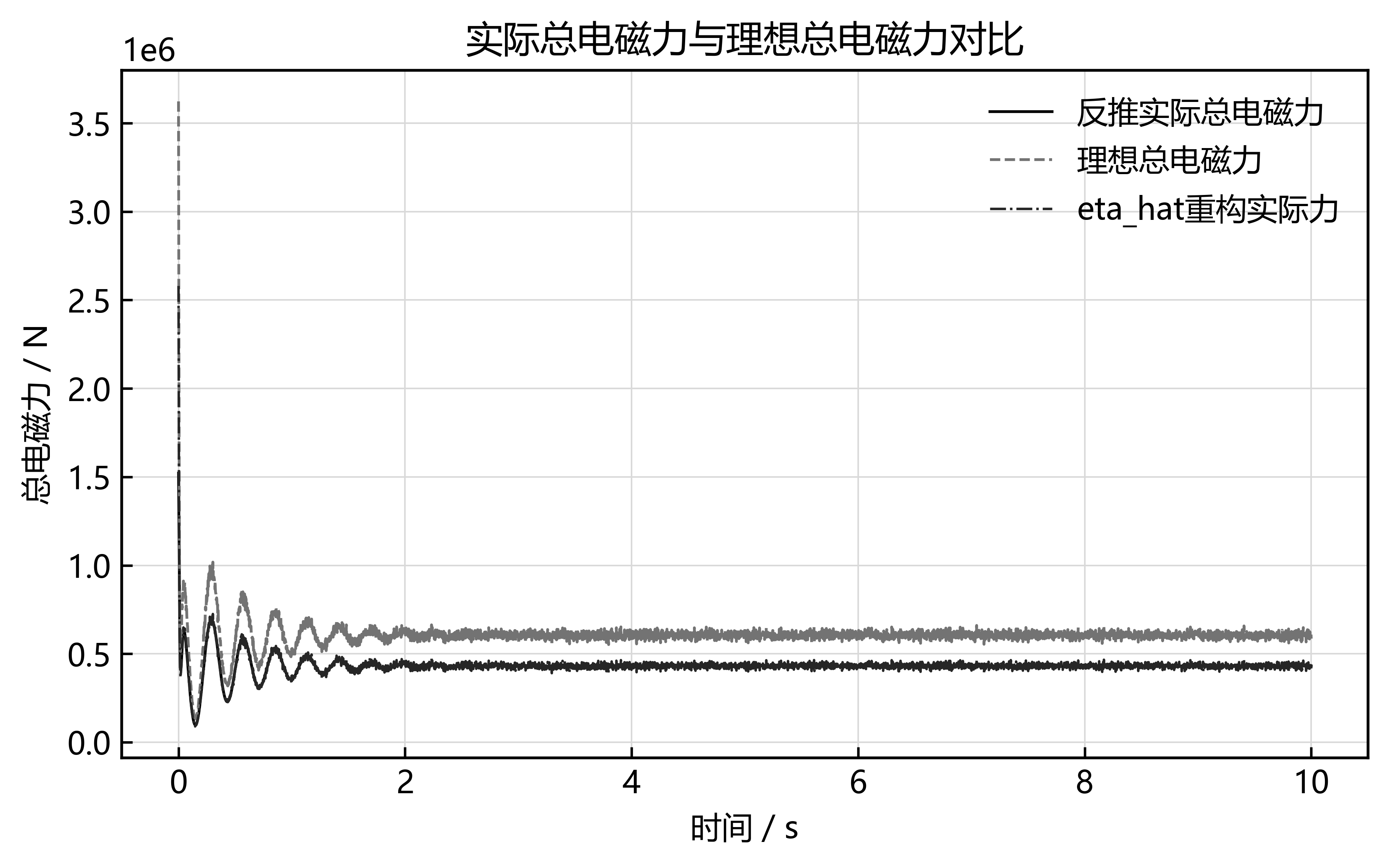
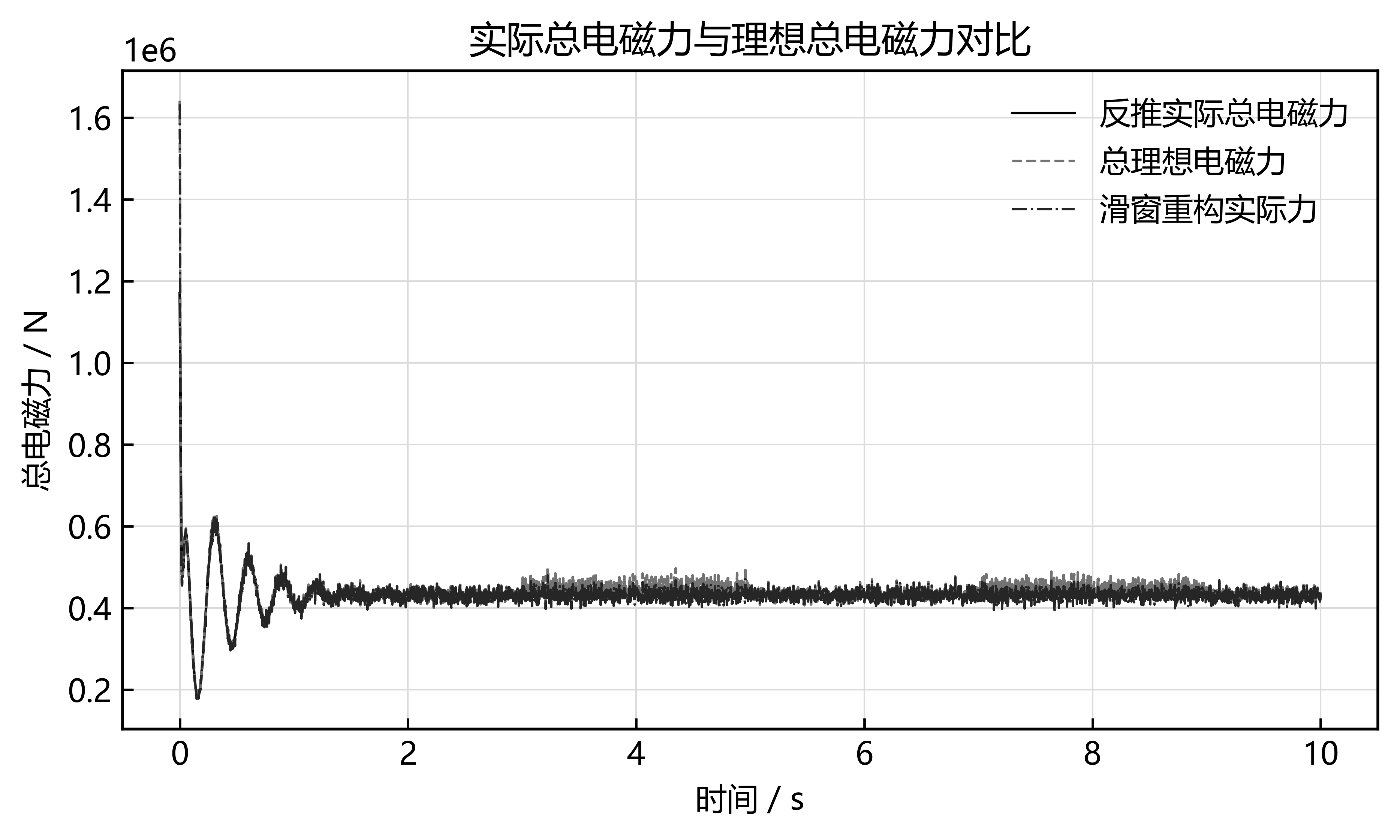
5.1 实际总电磁力反推
第3问假设全车 16 台电磁铁功率放大系数完全相同且固定不变,记为 η \eta η。对单个电磁铁有
F m r = η F m i . F_{mr}=\eta F_{mi}. Fmr=ηFmi.
由于实际总电磁力并不直接观测,需要依托第2问建立的动力学模型进行反推。由车体方程可得空气弹簧力
F k ( t ) = m c a c ( t ) + m c g . F_k(t)=m_c a_c(t)+m_cg. Fk(t)=mcac(t)+mcg.
又由悬浮架方程可得实际总电磁力
F m r ( t ) = m f z ¨ f ( t ) + F k ( t ) + m f g . F_{mr}(t)=m_f\ddot z_f(t)+F_k(t)+m_fg. Fmr(t)=mfz¨f(t)+Fk(t)+mfg.
其中 z f ( t ) = 0.06 − z g a p ( t ) z_f(t)=0.06-z_{gap}(t) zf(t)=0.06−zgap(t),对悬浮间隙与车体加速度序列采用 Savitzky--Golay 平滑后进行微分与反推,以减小噪声放大效应。
5.2 固定参数辨识与判定
根据第1问建立的理想电磁力模型,可计算 16 台电磁铁的理想总电磁力:
F m i , t o t ( t ) = ∑ j = 1 16 f ( I j ( t ) , z g a p ( t ) ) . F_{mi,tot}(t)=\sum_{j=1}^{16}f(I_j(t),z_{gap}(t)). Fmi,tot(t)=j=1∑16f(Ij(t),zgap(t)).
固定功率放大系数的最小二乘估计问题写为
min η ∑ i = 1 n F m r ( t i ) − η F m i , t o t ( t i ) 2 , \min_{\eta}\sum_{i=1}^n\leftF_{mr}(t_i)-\\eta F_{mi,tot}(t_i)\\right^2, ηmini=1∑nFmr(ti)−ηFmi,tot(ti)2,
其解析解为
η ^ = ∑ i F m i , t o t ( t i ) F m r ( t i ) ∑ i F m i , t o t 2 ( t i ) . \hat\eta=\frac{\sum_iF_{mi,tot}(t_i)F_{mr}(t_i)}{\sum_iF_{mi,tot}^2(t_i)}. η^=∑iFmi,tot2(ti)∑iFmi,tot(ti)Fmr(ti).
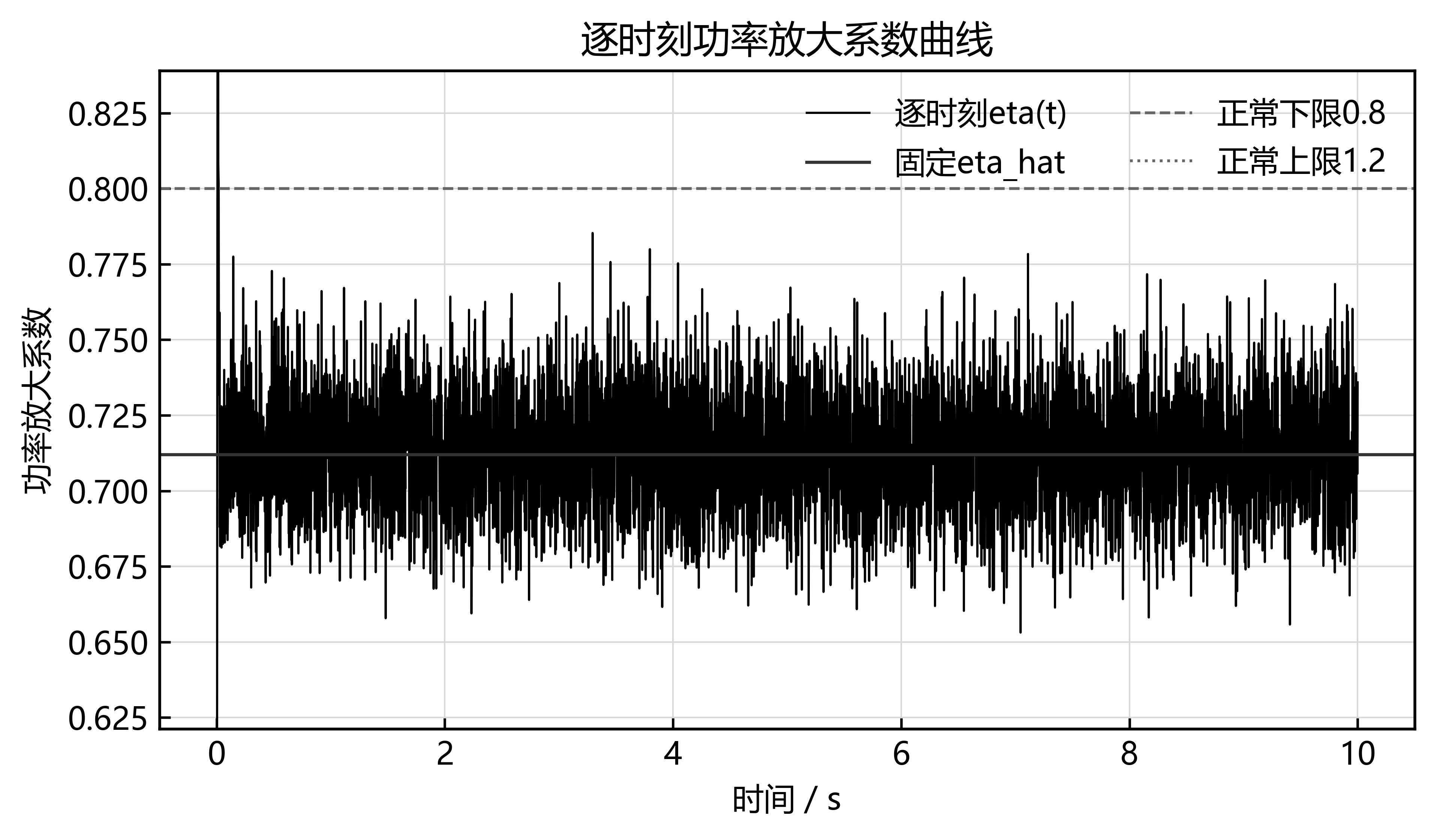
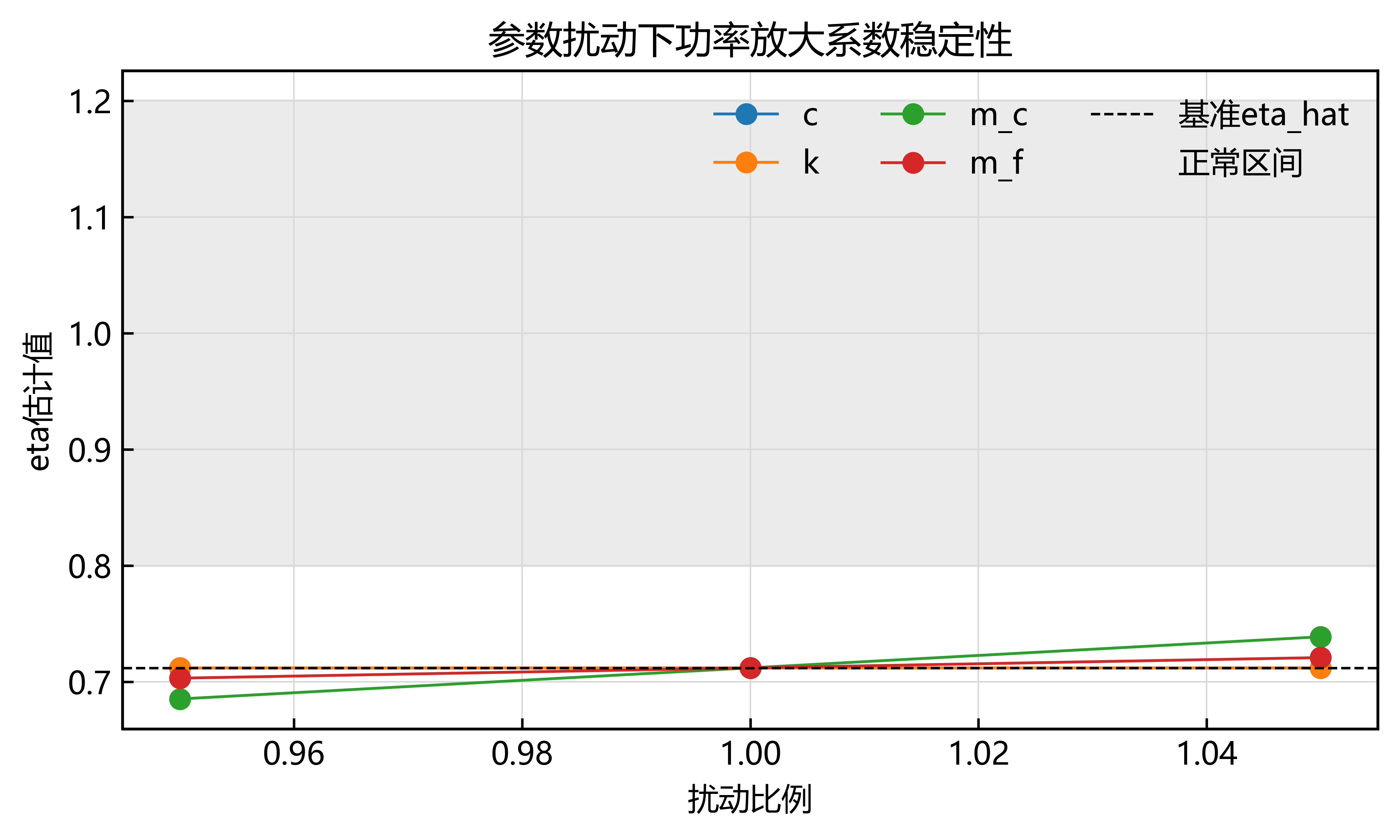
由报告可得
η ^ = 0.71198493 , \hat\eta=0.71198493, η^=0.71198493,
其 95 % 95\% 95% 置信区间为
0.71187068 , 0.71209918 . 0.71187068,\\ 0.71209918. 0.71187068, 0.71209918.
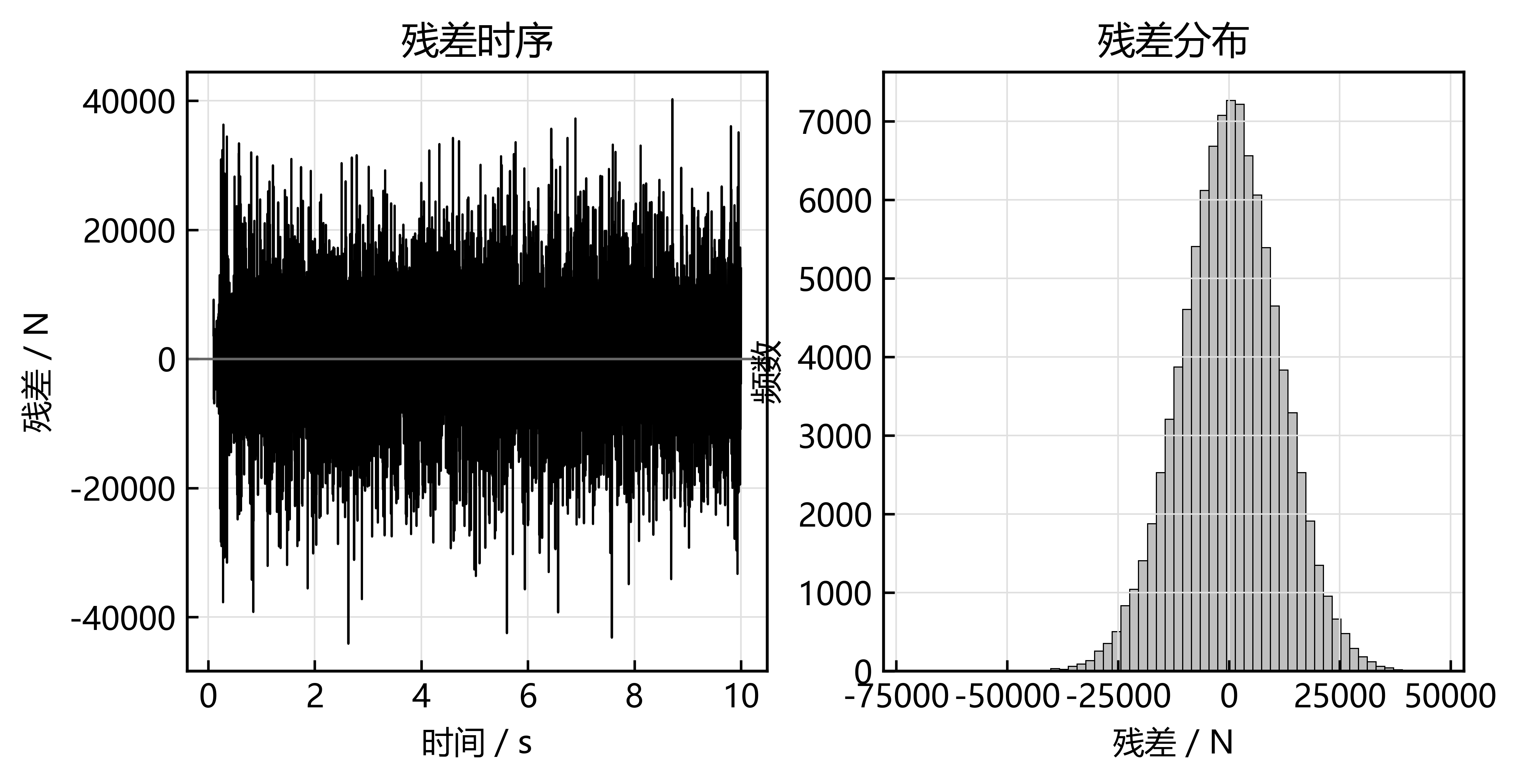
题目规定正常区间为 0.8 , 1.2 0.8,1.2 0.8,1.2。由于点估计及置信区间整体低于 0.8,因此整车悬浮系统存在功率放大器异常故障,且故障性质表现为输出衰减。进一步地,用 η ^ F m i , t o t \hat\eta F_{mi,tot} η^Fmi,tot 重构反推总力时,得到
R M S E = 11123.1451 N , R 2 = 0.937991 , \mathrm{RMSE}=11123.1451\ \mathrm{N},\qquad R^2=0.937991, RMSE=11123.1451 N,R2=0.937991,
平均相对误差仅为 2.0529 % 2.0529\% 2.0529%,说明该固定系数诊断结论具有较好的重构一致性。
6 时变多通道功率放大器故障诊断
6.1 严格可辨识性分析
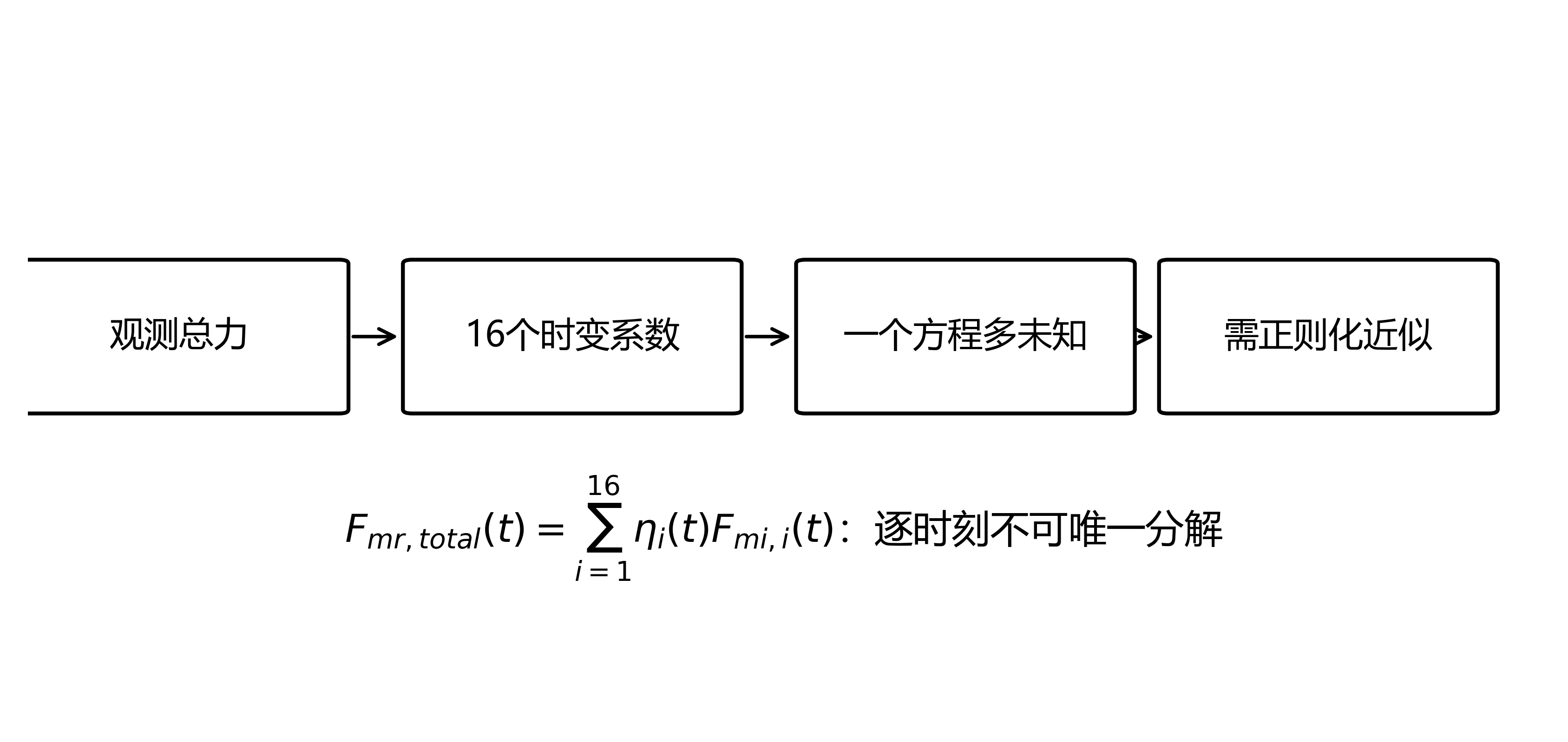
第4问假设 16 台电磁铁的功率放大系数均为时变函数,记为 η i ( t ) \eta_i(t) ηi(t),且彼此互不相关。此时系统满足
F m r , t o t a l ( t ) = ∑ i = 1 16 η i ( t ) F m i , i ( t ) . F_{mr,total}(t)=\sum_{i=1}^{16}\eta_i(t)F_{mi,i}(t). Fmr,total(t)=i=1∑16ηi(t)Fmi,i(t).
如果在每一时刻只观测到一个总实际电磁力标量,而未知量却是 16 个互不相关的时变参数,则逐时刻问题严格欠定。因此,第4问的首要结论不是"直接定位故障电磁铁",而是:
1 个标量观测 < 16 个自由未知函数 ⇒ 不可唯一辨识 . 1\ \text{个标量观测} \;<\; 16\ \text{个自由未知函数} \Rightarrow \text{不可唯一辨识}. 1 个标量观测<16 个自由未知函数⇒不可唯一辨识.
这意味着任何单时刻"精确还原 16 路真实系数轨迹"的结论,若未给出额外约束,都是不严谨的。
6.2 工程约束下的近似诊断模型
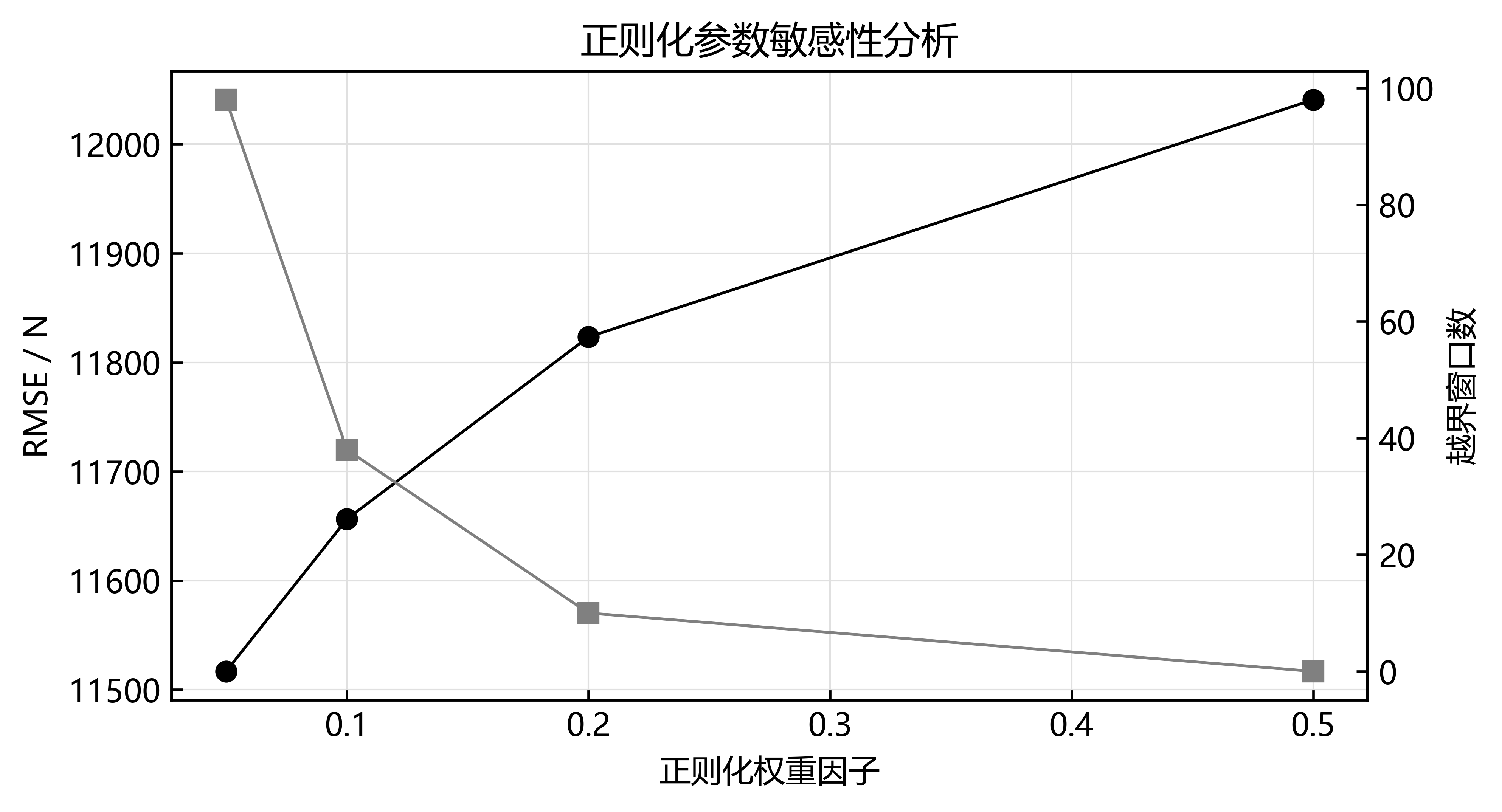
在工程诊断中,通常可引入"局部常值、变化平滑、故障通道较少、正常先验靠近 1"的附加约束。报告最终采用滑动窗岭正则模型:
min η ∥ y − X η ∥ 2 2 + λ ∥ η − 1 ∥ 2 2 , \min_{\boldsymbol\eta}\ \|\mathbf y-\mathbf X\boldsymbol\eta\|_2^2+\lambda\|\boldsymbol\eta-\mathbf 1\|_2^2, ηmin ∥y−Xη∥22+λ∥η−1∥22,
其中, y \mathbf y y 为反推得到的总实际电磁力向量, X \mathbf X X 为 16 路理想电磁力构成的设计矩阵, η \boldsymbol\eta η 为待估参数向量。该模型的作用在于:一方面利用局部时间窗将时变问题转化为分段近似常值问题,另一方面用 η ≈ 1 \boldsymbol\eta\approx\mathbf 1 η≈1 的正常先验抑制欠定分解中的虚假大幅振荡。
报告还指出,附件4全时域理想力设计矩阵满秩,条件数为
κ ( X ) = 2.192 , \kappa(\mathbf X)=2.192, κ(X)=2.192,
说明通道激励在总体上并不严重共线,因而在合理约束下具有开展工程诊断的基础。
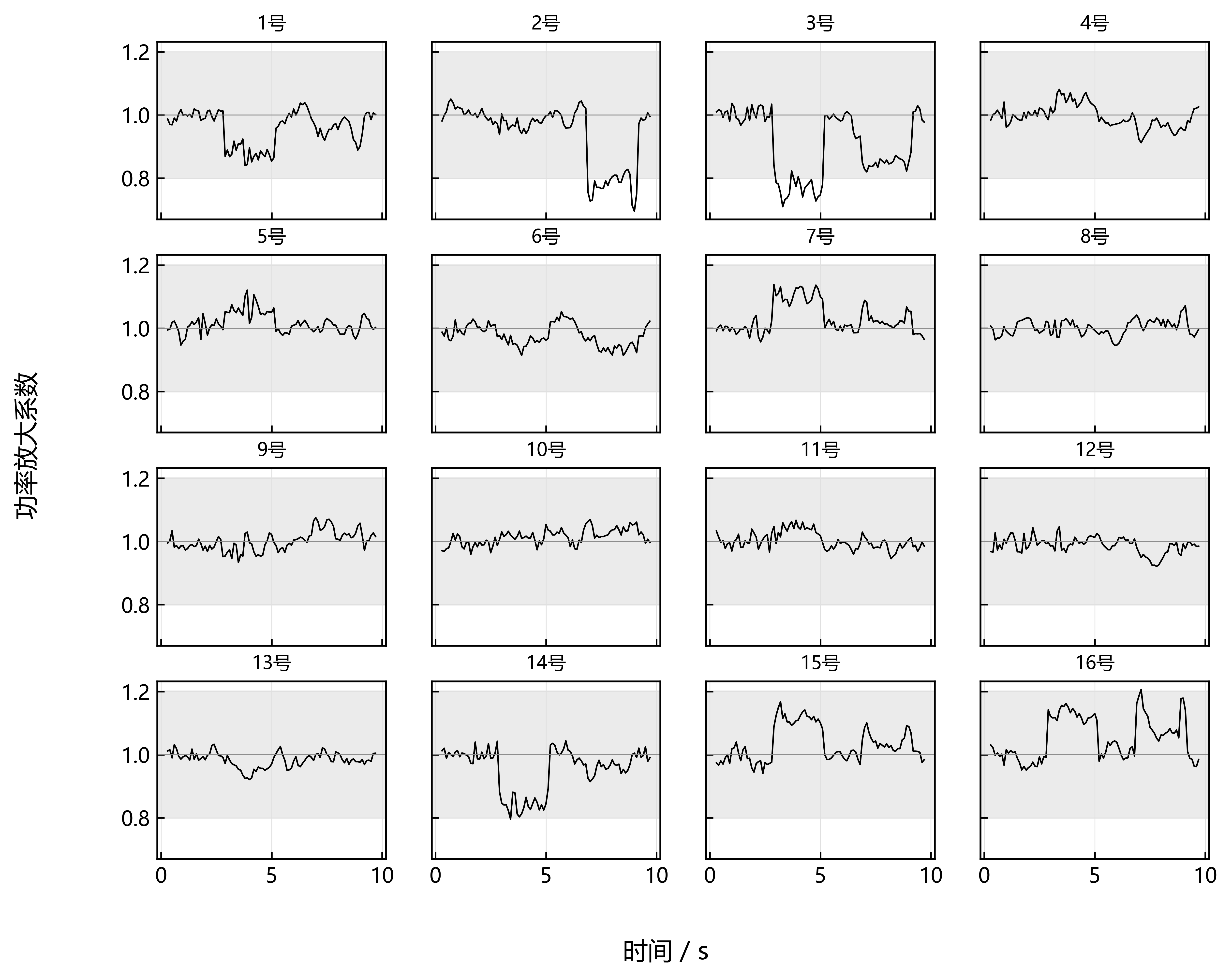
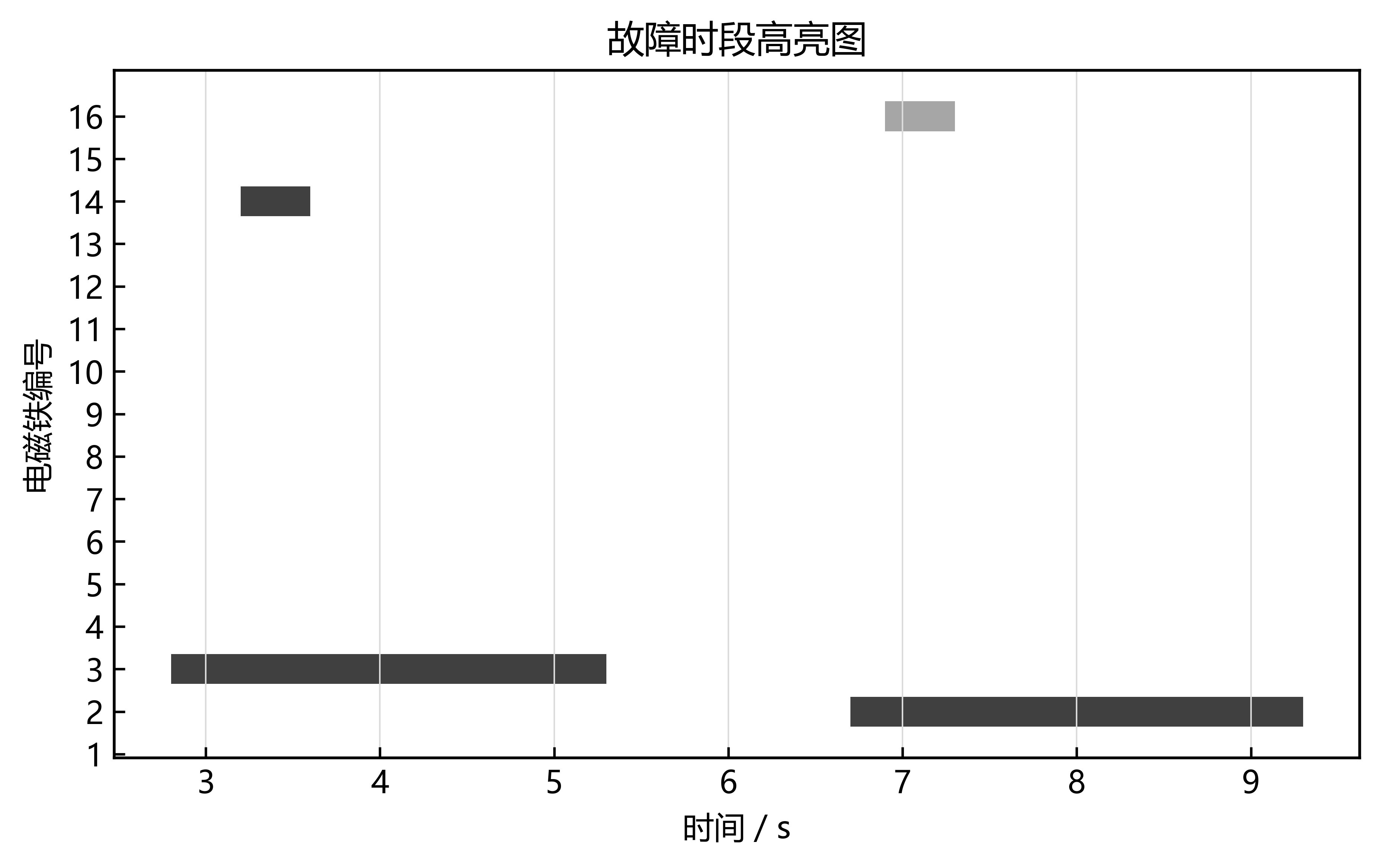
6.3 故障识别结果与解释
在滑动窗岭正则估计下,可靠故障编号为 2 号与 3 号电磁铁,其主要异常时段分别为
2号: 6.70 ∼ 9.30 s , η 2 , min = 0.694824 , \text{2号:}6.70\sim 9.30\ \mathrm{s},\qquad \eta_{2,\min}=0.694824, 2号:6.70∼9.30 s,η2,min=0.694824,
3号: 2.80 ∼ 5.30 s , η 3 , min = 0.709334. \text{3号:}2.80\sim 5.30\ \mathrm{s},\qquad \eta_{3,\min}=0.709334. 3号:2.80∼5.30 s,η3,min=0.709334.
此外,14 号与 16 号电磁铁存在短时越界现象,但受正则化强度影响较大,因此更稳妥的表述应为"可疑但不可唯一确认":
14号: 3.20 ∼ 3.60 s , η 14 , min = 0.795727 , \text{14号:}3.20\sim 3.60\ \mathrm{s},\qquad \eta_{14,\min}=0.795727, 14号:3.20∼3.60 s,η14,min=0.795727,
16号: 6.90 ∼ 7.30 s , η 16 , max = 1.206546. \text{16号:}6.90\sim 7.30\ \mathrm{s},\qquad \eta_{16,\max}=1.206546. 16号:6.90∼7.30 s,η16,max=1.206546.
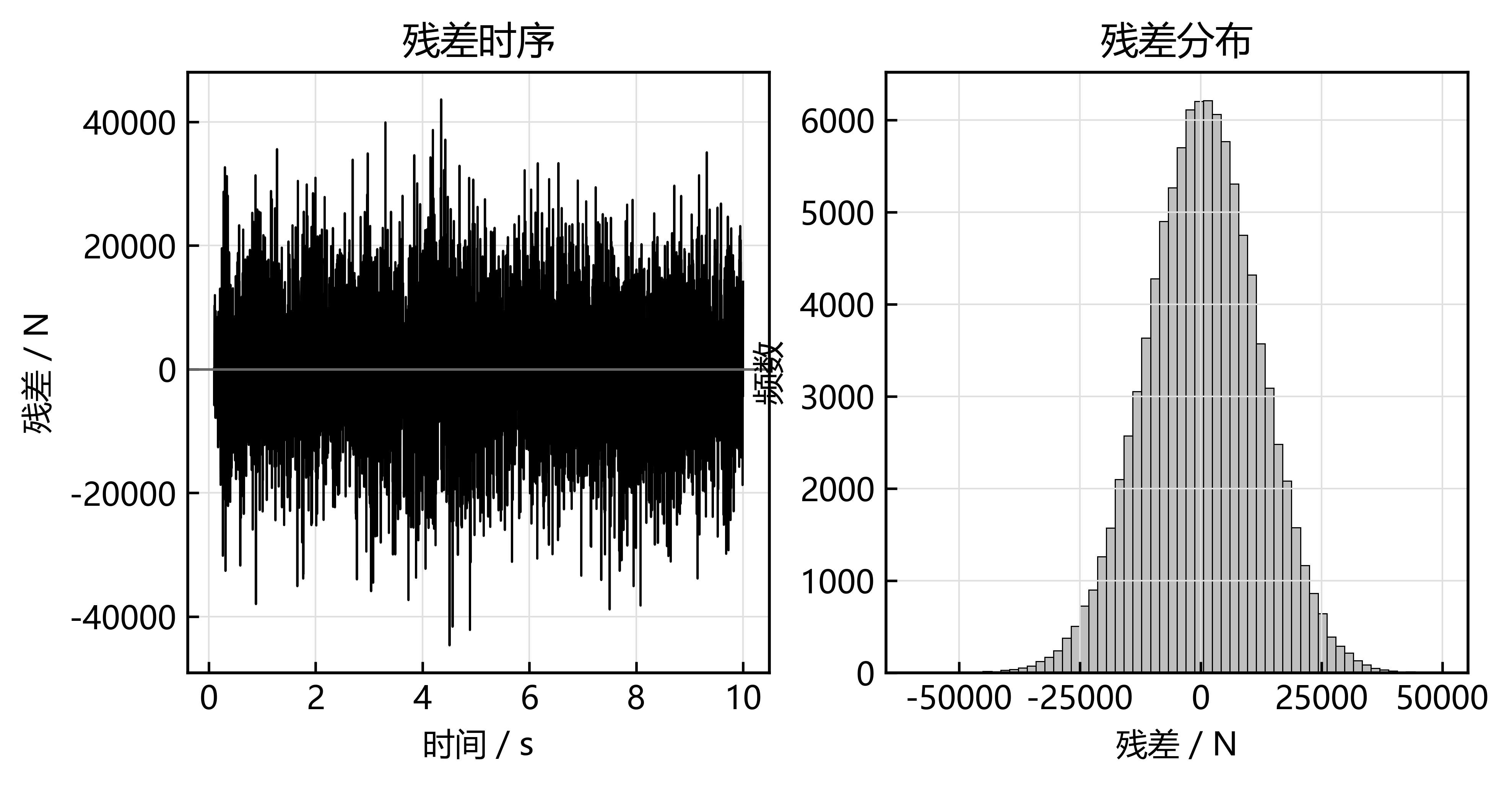
模型重构总力的验证指标为
R M S E = 11679.5334 N , M A E = 9291.0801 N , R 2 = 0.851636. \mathrm{RMSE}=11679.5334\ \mathrm{N},\qquad \mathrm{MAE}=9291.0801\ \mathrm{N},\qquad R^2=0.851636. RMSE=11679.5334 N,MAE=9291.0801 N,R2=0.851636.
这表明:虽然第4问不存在无条件唯一解,但在工程约束下构造出的近似诊断轨迹,仍能较好解释总力观测数据。
7 模型讨论与方法优势
将四个小问整合后,可以发现本文方法具有三点优势。
第一,模型链条前后闭环。第1问输出的理想电磁力模型直接进入第3、4问;第2问建立的动力学方程则成为反推实际总力的核心纽带,因此不存在"每问单独做、前后无法复用"的问题。
第二,参数具有明确物理解释。无论是 a , b a,b a,b,还是 η \eta η、 η i ( t ) \eta_i(t) ηi(t),均对应可解释的电磁力放缩含义,而不是难以物理解释的潜变量。
第三,结论层级清晰。对于第3问,可给出"整车存在衰减型故障"的强结论;对于第4问,则必须先给出"严格不可唯一辨识"的理论结论,再给出"工程约束下可靠故障为 2 号与 3 号,可疑异常为 14 号与 16 号"的分级结论。这样的表述既稳健,也更符合正式学术写作对结论边界的要求。
需要指出的是,本文整合稿仍有两点局限:一是未在模型中显式加入轨道单侧接触反力,因此第2问的无约束间隙解可能超过静止最大间隙;二是第4问的多通道诊断建立在局部常值与平滑先验之上,所得通道级结论应理解为"最优解释"而非"唯一真值"。
8 结论
本文围绕抱轨式磁浮列车悬浮电磁铁故障检测问题,构建了"理想力建模---动力学求解---固定参数辨识---时变多通道诊断"的一体化建模框架。主要结论如下:
(1)单电磁铁理想电磁力可由符号机理修正模型
F ^ m i = 0.0800615393 I ∣ I ∣ z 2 − 25.4236000 \hat F_{mi}=0.0800615393\frac{I|I|}{z^2}-25.4236000 F^mi=0.0800615393z2I∣I∣−25.4236000
有效描述,模型精度达到 R 2 = 0.878800 R^2=0.878800 R2=0.878800;
(2)车体---悬浮架二自由度动力学模型能够稳定求得 0 ∼ 10 s 0\sim10\ \mathrm{s} 0∼10 s 内的位移响应, 9 s 9\ \mathrm{s} 9 s 时无接触约束悬浮间隙为 0.0811369416 m 0.0811369416\ \mathrm{m} 0.0811369416 m,带几何上界解释时为 0.0600000000 m 0.0600000000\ \mathrm{m} 0.0600000000 m;
(3)在整车共用固定功率放大系数假设下,估计得到 η ^ = 0.71198493 \hat\eta=0.71198493 η^=0.71198493,整车悬浮系统存在显著的输出衰减型功率放大器异常;
(4)在 16 路时变系数完全自由的条件下,系统严格不可唯一辨识;在滑动窗岭正则约束下,可将 2 号和 3 号电磁铁识别为可靠故障通道,14 号和 16 号识别为可疑异常通道。
综上,本文从物理规律、动力学方程与参数辨识三个层面贯通了四个小问,既完成了竞赛问题求解,也形成了较为完整的学术论文表达框架。
参考文献(根据已提供报告整理,正式投稿前请核对年卷期页码)
1 刘家义等. 基于CNN-GRU模型的核反应堆冷却剂系统故障诊断系统设计.
2 曹珂诚等. 基于IFEEMD与CH特征的快速轴承故障诊断.
3 周晔锡. 基于SOM-BP串联神经网络的中速磁浮列车悬浮控制器故障诊断方法研究.
4 孙友刚等. 基于SPRT与混合智能决策的悬浮控制系统故障检测与恢复方法.
5 李孟威等. 基于Transformer的知识继承式模糊神经网络的故障诊断方法.
6 梁涛. 基于小波包Tsallis奇异熵的磁浮列车辅助逆变器故障诊断研究.
需要源代码的请在评论区留言,制作不易,请各位看官老爷点个赞和收藏