****论文题目:****Dynamic scale-aware vehicle re-identification via optimized YOLO-BFP and RIoU metric learning(基于优化的YOLO-BFP和RIoU度量学习的动态尺度感知车辆再识别)
****期刊:****Multimedia Systems(SCI4-CCFC)
****摘要:****车辆目标检测与跟踪是智能交通领域的一个研究热点。然而,由于交通场景复杂多变、遮挡问题、光照变化、车辆尺度差异等因素,准确检测和跟踪车辆目标仍面临诸多挑战。本研究提出了一种改进的级联匹配车辆检测与跟踪算法,该算法基于YOLO框架,将优化后的特征提取网络与双向融合金字塔模块相结合,形成目标检测模型YOLOBFP。为了提高模型在目标跟踪中的性能,我们引入了RIoU模块,该模块通过检测盒与预测盒的高度比提供补充信息,从而提高了跟踪关联的精度。在此基础上,构建了基于YOLO-BFP的轻型多目标车辆跟踪框架。在UA-DETRAC数据集上的实验结果表明,该算法不仅性能突出,而且在保持较高处理速度的同时显著减少了ID切换的数量。在低分辨率场景下,YOLOv8 + IoU跟踪器的HOTA比YOLOv8 + IoU跟踪器高出4.46%,证明了轻量级模型在保持高性能跟踪效果的同时减少了计算负担。
用更少的计算,追更难的车:YOLO-BFP + RIoU 车辆多目标追踪详解
一、为什么这个问题值得研究?
在智能交通系统中,车辆检测与追踪是核心任务之一。它不仅支撑着交通流监控和事故预警,也是自动驾驶、车联网等前沿领域的基础能力。
然而,真实交通场景远比实验室复杂。道路上的车辆密度高、速度快,相机分辨率参差不齐,还有遮挡、运动模糊、光照突变等一系列"折磨"系统的因素。精确追踪,难。
目前主流方法采用"先检测,后追踪"(detect-then-track)的范式:先用检测模型定位每帧中的车辆,再通过关联算法把不同帧中的同一辆车串联起来。这个链条中,任何一环的失误都会引发ID Switch(身份切换),即系统把同一辆车当成了不同目标,或把不同的车认成了同一辆。
本文的研究正是针对这一链条中最关键的两个薄弱点展开:检测质量不足 和关联匹配不准。
二、现有方法有哪些痛点?
2.1 小目标检测能力弱
传统特征金字塔(FPN)只做单向的从高层到低层的信息传播(top-down),高层的语义信息可以指导低层,但低层丰富的细节信息却无法反哺高层。对于尺寸差异悬殊的车辆(比如远处的小轿车 vs. 近处的大巴车),这种单向结构在多尺度特征融合上力不从心。
2.2 标准 IoU 在遮挡/模糊下失效
IoU(Intersection over Union)是追踪关联中最常用的相似性度量------把检测框和预测框的交并比算出来,越接近1说明越可能是同一个目标。
但遮挡会导致检测框面积缩小、置信度下降 ;非线性快速运动会导致卡尔曼滤波的预测框偏移。在这两种情况下,IoU的计算结果不再可靠,关联容易出错,进而引发大量ID Switch。
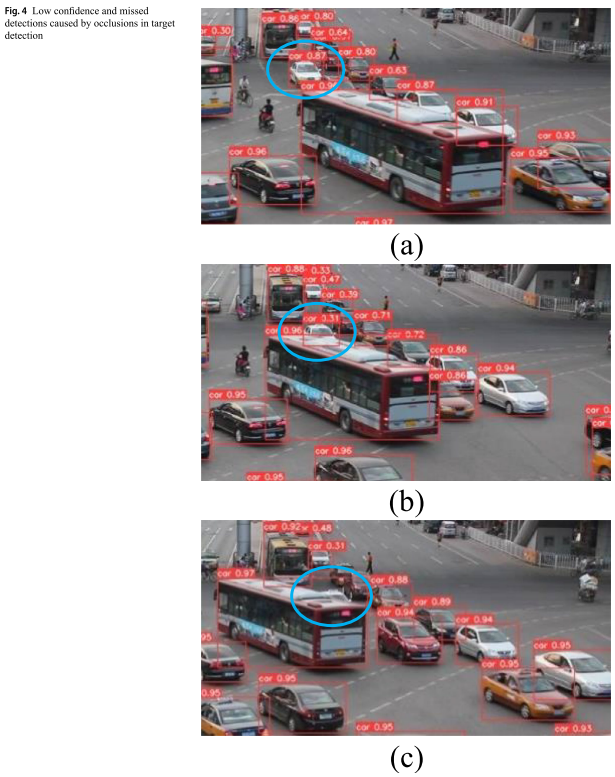
论文展示了一个典型案例:一辆白色轿车被遮挡后,置信度从正常水平骤降至0.31,在标准追踪流程中直接被过滤掉,无法与历史轨迹成功关联。
2.3 单次关联匹配容错率低
传统方法通常只做一轮匹配:检测框要么和轨迹配上,要么被丢弃。这意味着低置信度的框(很可能包含真实车辆)会被直接抛弃,轨迹一旦丢失就很难恢复。
2.4 Re-ID 特征代价高
引入外观重识别(Re-ID)特征虽然能增强重识别能力,但需要额外的网络前向推理,在资源受限的设备上会显著降低处理帧率。
三、本文提出的解决方案
本文的方法体系由三个模块组成,分别对应检测、关联度量和追踪三个层面:
YOLO-BFP (改进检测器)+ RIoU (改进相似性度量)+ RCTrack(改进追踪算法)
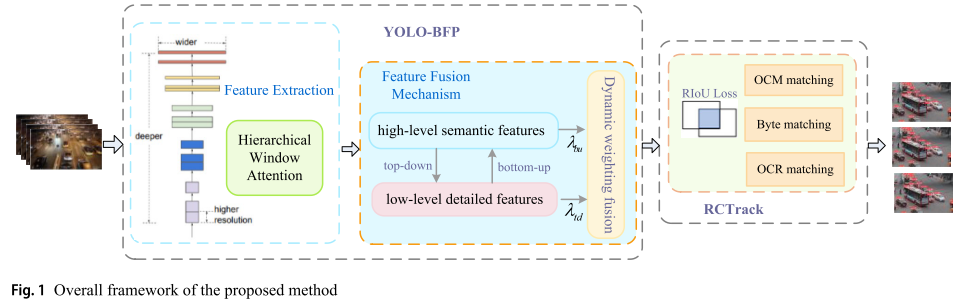
【此处配图:图1 --- 整体框架图(论文Figure 1)】
3.1 YOLO-BFP:更强的多尺度检测器
骨干网络:EfficientNet + 层级窗口注意力
用 EfficientNet 替换原始 YOLO 骨干网络。EfficientNet 的核心思想是复合缩放:通过一套统一的缩放系数,同时按比例调整输入分辨率、网络深度和宽度,在计算量约束下实现最优性能。
在此基础上,进一步引入层级窗口注意力机制(Hierarchical Window Attention),其核心公式为:
通过局部窗口划分与层级结构,网络在局部细节捕获与全局上下文建模之间取得平衡,显著增强了在复杂车辆场景中的特征表达能力。
创新模块:双向融合金字塔(BFP)
BFP(Bidirectional Fusion Pyramid) 是本文在检测端最核心的创新。与传统FPN的单向传播不同,BFP构建了双向信息流:
- Top-down:高层语义特征 → 低层,帮助低层理解"这是什么"
- Bottom-up:低层细节特征 → 高层,帮助高层感知"在哪里、有多大"
双向融合公式:
更重要的是,BFP引入了动态权重归一化机制,让模型自动学习不同尺度特征的融合比例:
这意味着面对不同场景(近处大车 vs 远处小车),BFP能自适应地调整各层特征的贡献权重,而不是用固定比例生硬融合。
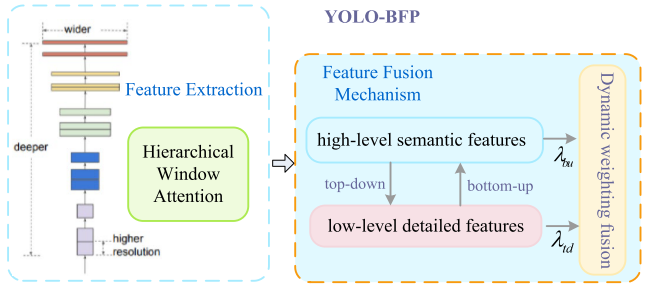
【此处配图:图1中YOLO-BFP内部结构部分,即Feature Fusion Mechanism示意】
3.2 RIoU:用高度比增强关联鲁棒性
设计动机
车辆在行驶中,形状相对稳定 。即便发生遮挡,检测框在高度维度上的变化也比宽度更具规律性和鲁棒性。标准IoU在遮挡场景下会整体偏小,但如果检测框和预测框在高度比例上差异很大,说明关联本身就存在问题。
计算方式
RIoU 在标准 IoU 的基础上,乘以一个高度相似性系数:
其中 是卡尔曼滤波预测框的高度,
是检测框的高度。取二者之比的较小值,确保系数始终在 (0, 1] 之间。
直觉理解:如果预测框和检测框高度相近(比例接近1),RIoU ≈ IoU,影响微小;如果高度差异悬殊,说明这次关联可能是误匹配,RIoU 会将原始 IoU 显著压低,从而减少错误关联。
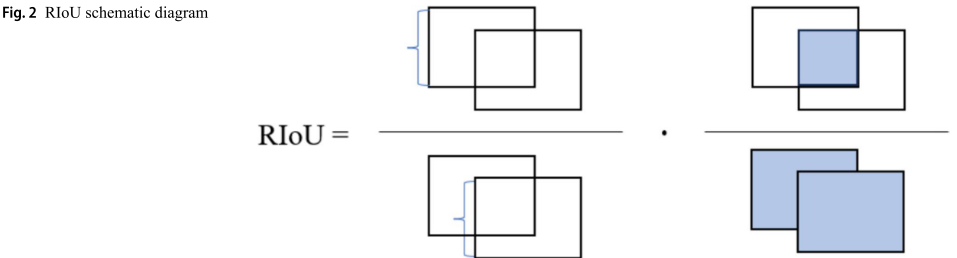
【此处配图:图2 --- RIoU示意图(论文Figure 2)】
与同类方法的对比
HybridSort中的HMIoU也利用了高度信息,但其关注的是IoU区域高度与最小外接矩形高度之比 (偏向几何形状分析);而RIoU关注的是预测框与检测框本身的高度之比(偏向实例形状一致性),两者出发点不同,但实验证明效果相当。
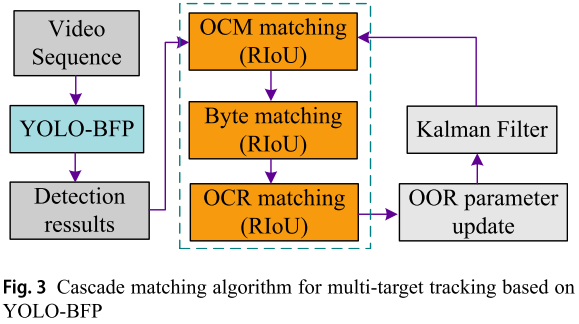
3.3 RCTrack:三阶段级联匹配
RCTrack(RIoU Enhanced Cascade Tracking Algorithm)的核心思想是:不同置信度的检测框、不同状态的轨迹,分阶段、分策略地进行关联。
【此处配图:图3 --- 级联匹配流程图(论文Figure 3)】
整个流程分为三轮:
第一轮:OCM 匹配(高置信度框优先)
OCM(Observation-Centric Momentum)将高置信度检测框 与卡尔曼滤波预测轨迹进行关联。传统方法直接假设线性运动,但实际车辆运动方向会有偏差且存在噪声干扰。OCM在损失函数中引入运动方向一致性损失项:
其中 ,V 是由前两次观测计算的平均速度。通过方向损失约束,减少累积估计误差对追踪的影响。
第二轮:Byte 匹配(挽救低置信度框)
第一轮未匹配的轨迹,与低置信度检测框进行关联。这一设计灵感来自ByteTrack------低置信度框很可能是被遮挡的真实目标,不应直接丢弃。通过Byte匹配,可以有效提升部分遮挡或运动模糊目标的关联成功率。
关联失败的低置信度框作为背景丢弃;未匹配的轨迹进入第三轮。
第三轮:OCR 匹配(轨迹恢复)
OCR(Observation-Centric Recovery)利用轨迹的最后一次有效观测位置,与OCM阶段遗留的未匹配高置信度框进行关联,实现对丢失轨迹的恢复。这一步与Byte匹配共同构成系统的"双保险"轨迹恢复机制。
最终,成功重关联的轨迹通过 OOS(Observation-centric Online Smoothing) 插值对卡尔曼滤波参数进行优化更新,减少过去遮挡带来的参数偏差。
整个RCTrack无需Re-ID特征提取,在维持高帧率的同时大幅降低ID Switch。
四、实验结果
4.1 实验设置
- 数据集:UA-DETRAC(40个视频序列,960×540分辨率,25FPS,涵盖多种场景和天气)
- 评估分辨率:主要在320×320(低分辨率场景),同时对比480×480和640×640
- 硬件:RTX 2080Ti GPU
- 评估指标:HOTA(越高越好)、MOTA、IDF1、MT(完全追踪比例)、ML(完全丢失比例)、IDSW(越低越好)、FPS(越高越好)
4.2 主要追踪结果对比
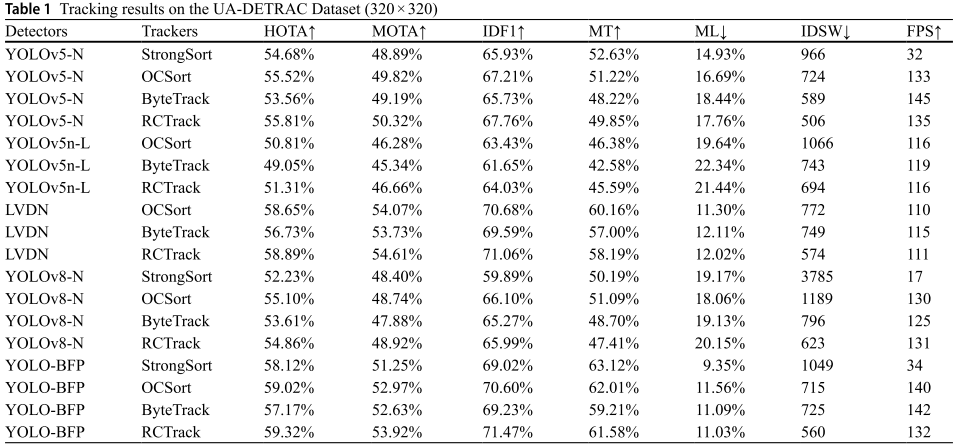
【此处配表:表1 --- UA-DETRAC数据集追踪结果对比(论文Table 1)】
核心发现:
- YOLO-BFP + RCTrack 在320×320分辨率下达到 HOTA 59.32% ,相比基线 YOLOv8+IoU Tracker 提升 +4.46% HOTA,同时 IDSW 减少63次
- 相比同检测器下的ByteTrack:HOTA +2.15% ,MOTA +1.29% ,IDF1 +2.24%,IDSW减少165
- 相比OCSort:MOTA +0.95% ,IDSW大幅减少 237次
- 使用YOLO-BFP作为检测器时,搭配ByteTrack的速度比YOLOv8-N提升 25%
4.3 不同分辨率下的性能对比

【此处配表:表2 --- 不同分辨率下YOLO-BFP+RCTrack性能对比(论文Table 2)】
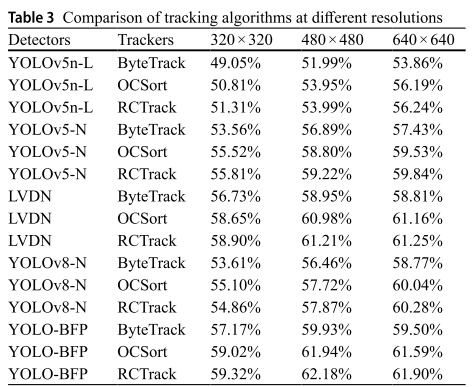
【此处配表:表3 --- 不同算法在不同分辨率下的HOTA对比(论文Table 3)】
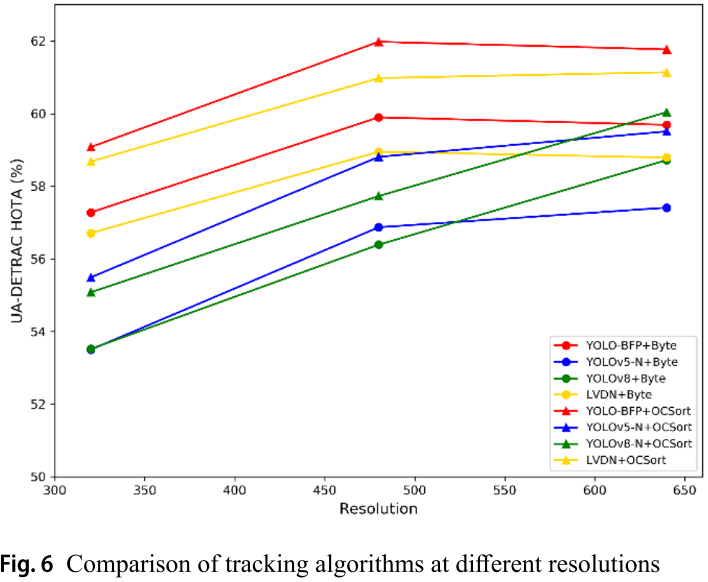
【此处配图:图6 --- 不同分辨率下追踪算法对比折线图(论文Figure 6)】
值得注意的结论:
- 最优分辨率为 480×480:HOTA 62.18%,MOTA 55.34%,IDF1 74.09%
- 320×320下的YOLO-BFP+RCTrack,性能超过其他算法在640×640下的表现,说明高质量检测器可以弥补分辨率的不足
- 更高分辨率(640×640)并不总是更好:对大目标精度下降,处理速度也更慢
4.4 追踪可视化对比
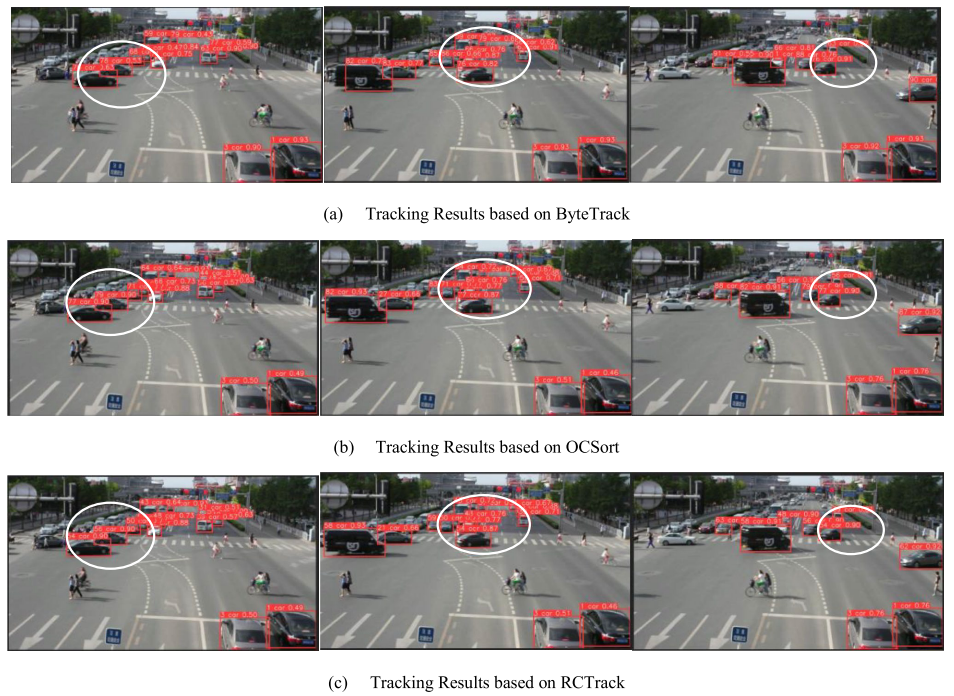
【此处配图:图5 --- ByteTrack/OCSort/RCTrack追踪结果对比(论文Figure 5)】
以视频MVI_30361为例:
- 第643帧:ByteTrack在遮挡后将车辆68错误重识别为车辆86;OCSort和RCTrack均正确维持了车辆ID
- 第689帧:两辆黑色车辆分离时,ByteTrack发生更频繁的ID Switch,而RCTrack凭借OCR机制有效抑制了这一问题
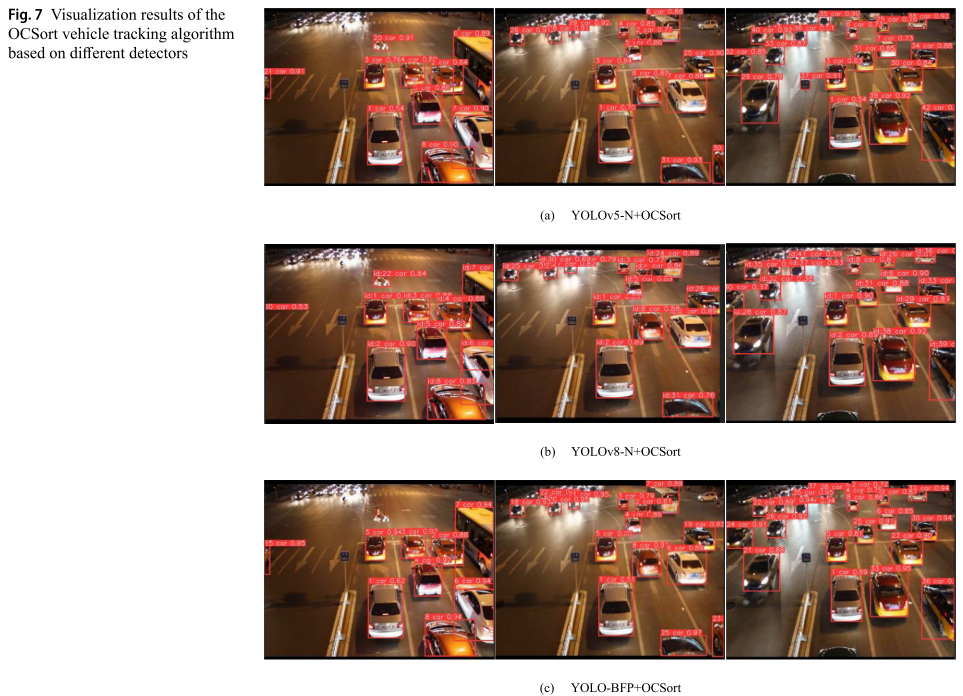
【此处配图:图7 --- 不同检测器在OCSort追踪算法下的可视化对比(论文Figure 7)】
YOLO-BFP在小目标检测(远处缩小的车辆)上的优势同样体现在可视化中:YOLOv5-N和YOLOv8-N的检测器更早丢失远距离目标,而YOLO-BFP+OCSort能追踪到更远的距离。
五、消融实验:每个模块到底贡献了多少?
5.1 BFP模块的贡献
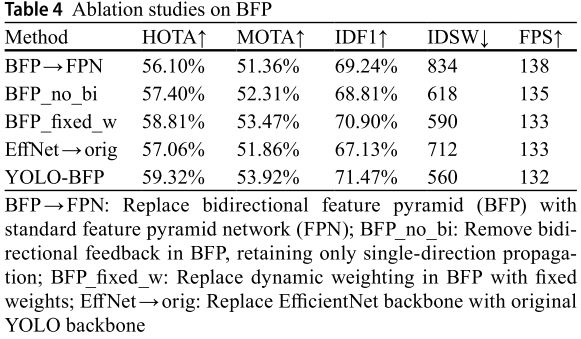
【此处配表:表4 --- BFP消融实验结果(论文Table 4)】
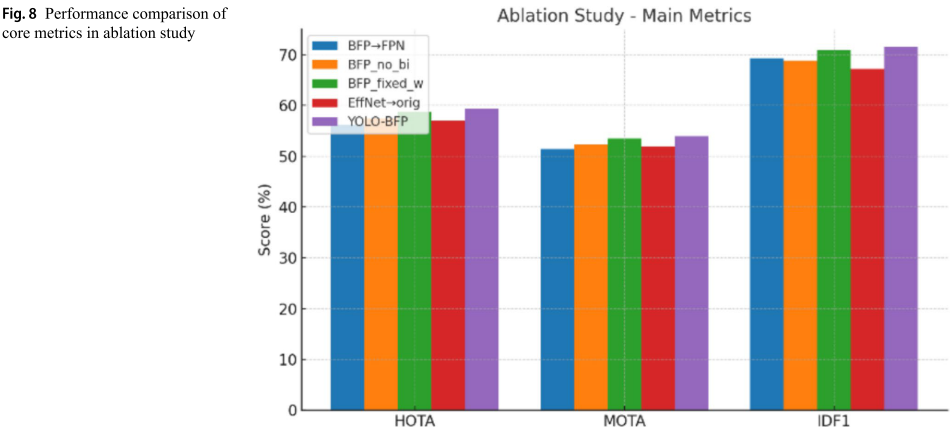
【此处配图:图8 --- 消融实验核心指标柱状图对比(论文Figure 8)】
分析:
- 双向路径是BFP最重要的设计,去掉后bottom-up的细粒度空间细节无法传递到高层,小目标和遮挡目标的检测质量明显下降
- 动态权重的作用相对温和但不可或缺,固定权重在不同场景下的自适应能力弱,影响小目标召回率
- EfficientNet骨干的替换带来了显著的跨尺度特征提取能力提升
5.2 RIoU的贡献

【此处配表:表5 --- RIoU与其他IoU方法在RCTrack中的对比(论文Table 5)】
分析:
- DIoU/CIoU虽然在定位精度上有所改善(MT/ML指标),但它们不提供高度一致性约束,导致关联质量反而更差,IDSW高达1600+
- RIoU和HMIoU均验证了高度线索对关联准确性的重要性,两者HOTA接近
- RIoU实现更简单(仅需计算高度比),却取得了最低的IDSW(560),性价比极高
六、方法的局限性与未来展望
作者坦诚地指出了现有方法的不足:
- 极端拥挤场景:在非常密集的车流或恶劣天气(如暴雨、大雾)中,性能可能明显下降
- 单数据集验证:目前仅在UA-DETRAC上测试,跨数据集泛化性有待验证
未来工作方向:进一步优化模型结构和算法策略,提升系统在更复杂场景下的鲁棒性和跨域泛化能力。
七、总结
本文提出了一套面向轻量化部署场景的车辆多目标追踪框架,三个核心贡献各司其职、协同增效:
- YOLO-BFP:双向融合金字塔 + EfficientNet骨干,在有限算力下显著提升多尺度检测质量,尤其是对小目标和远距离车辆
- RIoU:用简单的高度比为IoU提供形状一致性约束,低成本解决遮挡场景下的关联漂移问题
- RCTrack:三阶段级联匹配,充分利用高/低置信度检测框,无需Re-ID特征即可大幅减少ID Switch
最核心的结论是:在低分辨率(320×320)输入下,本文方法的追踪性能超过了其他方法在高分辨率(640×640)下的表现。这对算力受限的边缘设备部署场景具有重要的实践意义------你不需要更贵的摄像头,你需要更聪明的算法。