随着智慧医疗的加速推进,医院智慧药房建设已进入规模化落地阶段。自动取药机器人作为智慧药房中实现"药等人"模式的关键设备,对其运动控制系统在精准性、空间适配性和通信稳定性等方面提出了更高的要求。

本文以自动取药机器人为应用载体,阐述了STM系列一体式步进伺服电机在该设备中的应用方案。
实际应用表明,该系列电机凭借高度集成化的结构设计和闭环伺服控制特性,有效满足了取药机器人在有限空间内精准定位、多轴协同及快速响应的运动控制需求,为智能药房设备的运动系统搭建提供了"电机即工位"的紧凑化方案。
一、应用背景
在国家大力推进公立医院高质量发展与医保信息化建设的双重背景下,医院药房智慧化转型已从零散试水迈向全面普及。
近年来,全国多家大型医院陆续部署了覆盖门诊、药房、病房、手术室等核心区域的智能机器人体系,可以精准指导患者取药或就诊。
在智慧药房场景中,自动取药机器人不再是简单的辅助工具,而是深度嵌入"取药---补药---发药"完整工艺链条的核心单元。
例如,在北京安贞医院通州院区,大小机器人通过接力方式将药品运输至发药机,发药机内机械臂快速精准移动,患者最快30秒即可完成取药。
在效率提升之外,自动取药机器人还承担着替代人工夜间值守、降低运营成本等实际职能。可以预见,在药品追溯码强制采集等政策驱动下,自动取药设备正经历从功能有到速度准、从独立运动到精准协同的技术跃迁,对设备内各运动轴的控制精度、通信可靠性和空间利用效率提出了刚性需求。
二、设备简介
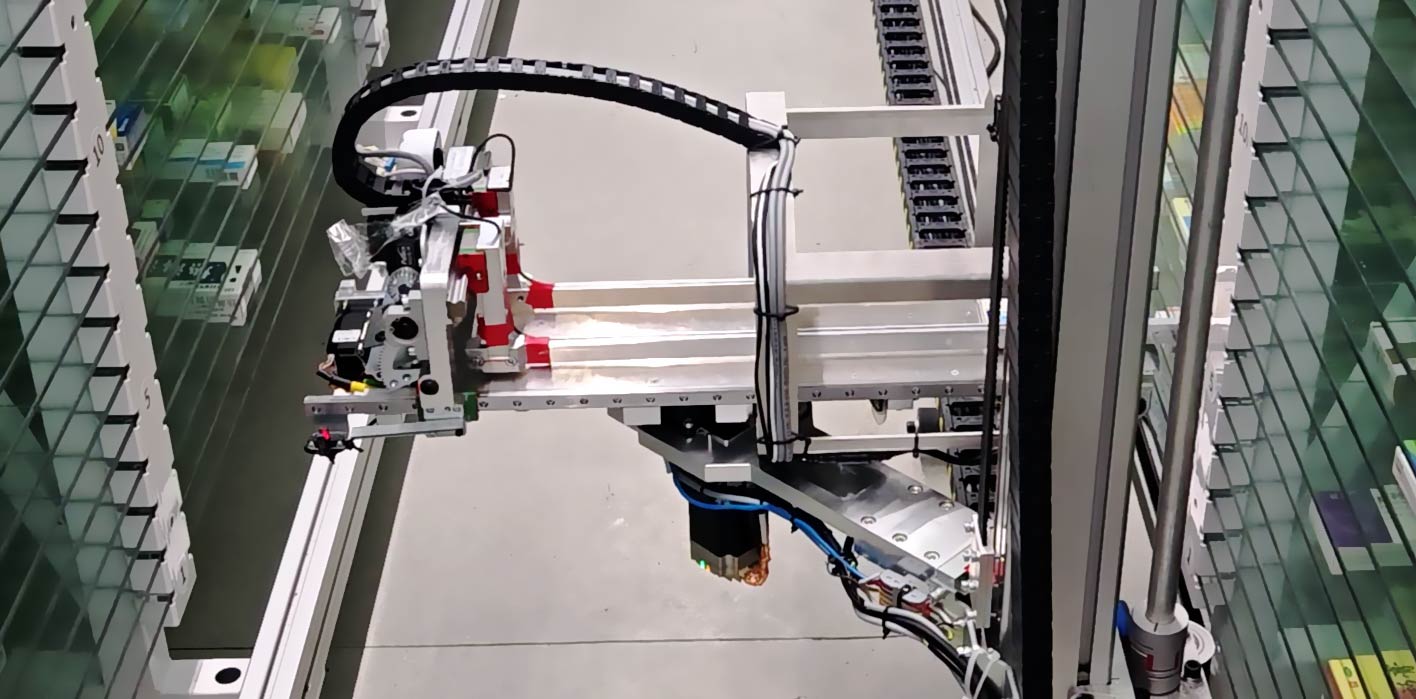
本次应用案例中的自动取药机器人,是将智能物流领域的机器人技术向智慧药房场景迁移的成功实践。
该设备部署于药房的智能药品存储与发放系统中,专为满足医院药房和大型连锁药店中高频次、多种类药品的精细化取药需求而设计。
在无人值守或人机协同模式下,机器人通过多轴运动机构实现对药品的快速检索、精准抓取与自动运送,替代人工完成重复性取药动作,显著提升发药效率和准确率。
三、应用方案
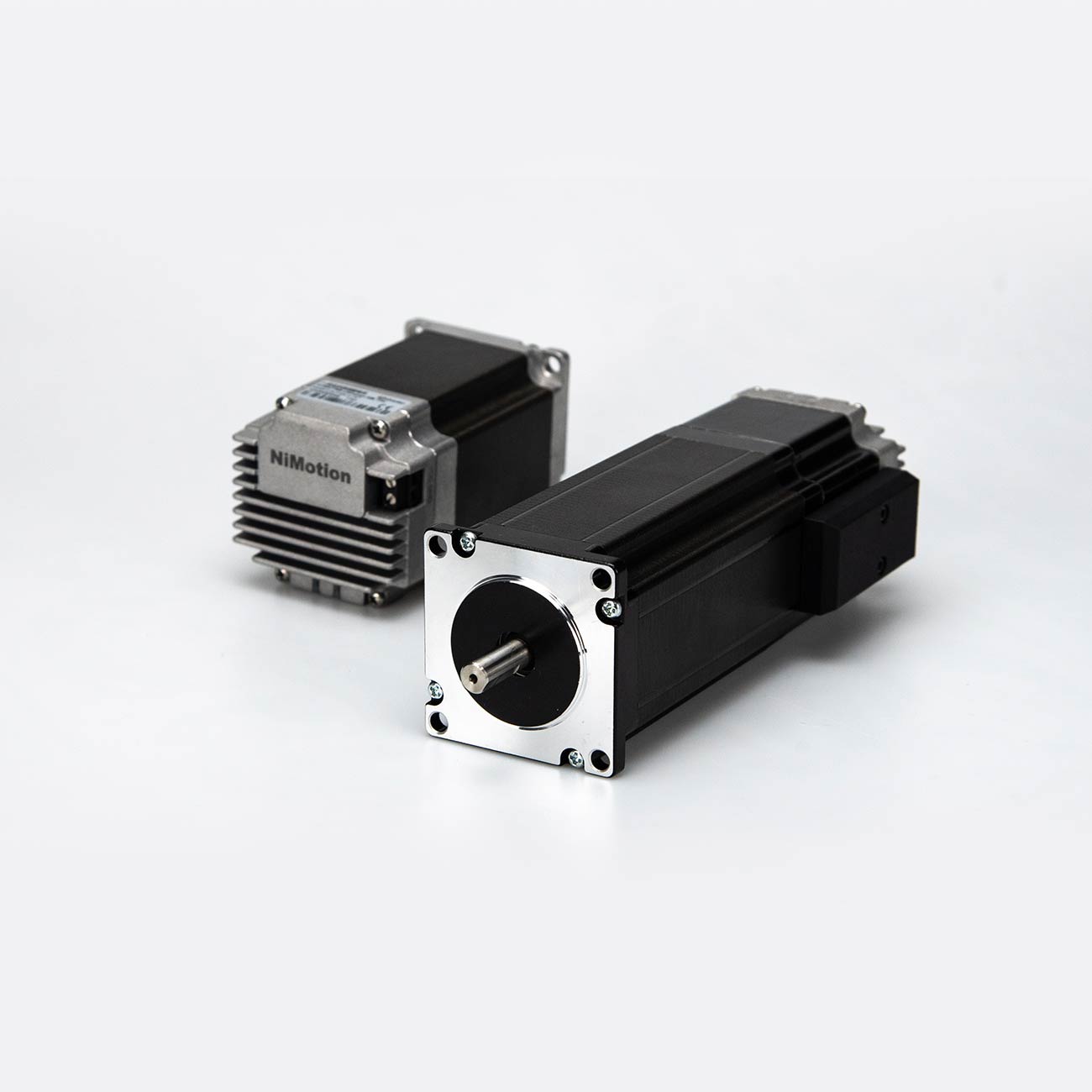
在运动控制方案中,选用了不同规格的STM系列一体式步进伺服电机,分别对应设备中不同负载、不同运动行程的执行机构,共同构建了取药机器人从粗动到精定位的多轴运动控制体系。
其中,STM35一体化步进伺服电机作为轴径更小、力矩更均衡的机型,承担轻负载或辅助定位任务;STM42一体化步进伺服电机负责中型力矩输出环节;STM28一体化步进伺服电机则适合紧凑空间内的精确动作。这三台电机共同构建了取药机器人从粗动到精定位的多轴运动控制体系。
在控制模式上,采用CANopen CiA 402协议框架中的轮廓位置模式(Profile Position Mode, PP Mode) 。PP模式主可用于点对点定位应用,在此模式下,上位机给目标位置、位置曲线的速度、加减速及减速度等参数,伺服驱动器内部自主生成定位轨迹,并完成位置、速度和转矩的三环控制。
取药机器人在执行"从A坐标移动到B坐标取药"这一典型动作时,主控PLC只需下达目标位置和运动参数,电机即可"自主"完成加减速规划和定位,不占用主控器的大量实时计算资源。
同时,得益于电机驱动器一体化集成的特性,控制系统无需为每台电机配备独立的外部驱动器柜,不仅简化了电控柜布线,也为药房设备的部署和后期维护带来了显著便利。
四、应用产品
各型号的技术参数如下:
 STM28系列一体化步进伺服电机
STM28系列一体化步进伺服电机
STM2851-CANopen:28mm×28mm超紧凑机身,机身长度65.5mm,保持力矩0.1Nm,轴径Φ5mm,额定电压24V DC。尺寸极小的特点使其能够在取药机器人中部署于深度受限或通道狭窄的工位,充当精细空间内的高精度动作节点。
 STM35系列一体化步进伺服电机
STM35系列一体化步进伺服电机
STM3534B-CANopen:35mm×35mm方形机身,机身长度50mm,保持力矩0.2Nm,额定电压24V DC,适配NEMA 14安装尺寸,配备17位单圈绝对值编码器。适用于空间极其受限的关节或末梢执行机构,如取药夹具的精细操作。
 STM42系列一体化步进伺服电机
STM42系列一体化步进伺服电机
STM4248-CANopen:暂未获取到完整公开技术数据,从型号命名来看属于NEMA 17规格的集成电机机型,整机长度约48mm,适合中等力矩输出场景,作为上述方案中的负载均衡型电机使用。
 STM57系列一体化步进伺服电机
STM57系列一体化步进伺服电机
STM57H:适用于大扭矩输出场景,基于57mm框架设计,支持12-52VDC宽电压供电,运行电流0~4A可调,支持CiA 402中的PP、VM、PV、HM、CSP、CSV、IP模式。当取药机器人需要拓展更大负载的执行单元(如大包装药品的自动补货机构)时,STM57H可作为力矩增强的备选适配电机。
五、问题及解决
在自动取药机器人的调试和试运行过程中,用户遇到了CANopen总线通信干扰的挑战。
自动取药机器人属于多电机协同系统,电机驱动功率单元频繁开关(功率开关管以数kHz至数十kHz的频率导通和关断)会产生较高梯度的电压脉冲,通过分布电容耦合作用于CAN总线,此外主电流回路的脉动电流对空间也有电磁辐射干扰。CAN总线采用差分信号传输两根线进行双绞线传输,应用中布线不规范、电机与驱动器接地不良等因素会直接影响通信质量,严重时导致总线数据帧错误甚至驱动器离线,使机器人出现运动失步或系统的间歇性不响应。
针对上述问题,可实施以下解决方案:
规范CAN总线布线:信号线与动力线做到最大限度隔离并布线路径分开,避免强电侧的电磁耦合至通信线路。必要情况下,通信线不走入共用的强电线槽,单独敷设以屏蔽外界干扰。
增强接地可靠性:对电机驱动系统和CAN网络实施独立可靠接地,将干扰电流通过低阻抗路径导入大地而非泄露至通信回路。
使用标准CANopen通信电缆:使用具有金属编织屏蔽层的双绞线专用通信线缆,以保证差分信号的完整性并屏蔽外部干扰。
六、总结
自动取药机器人作为智慧药房从"人找药"向"药等人"转型的关键设备,其运动控制系统的变革方向高度契合了当前工业自动化领域通行的"集成化、总线化、模块化"技术路径。
一体式步进伺服电机以其"电机即工位"的高集成度设计,在自动取药机器人这类空间有限、精度要求高而负载相对适中的医疗自动化设备中展现出了显著的技术与经济优势,无疑是推动智慧药房系统迈向更高效率、更低故障率和更低部署门槛的理想选择。