|------------------------------------------------------------------------------------------------|-------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
| emplate<class M , class C > ||
| Subscriber | [subscribe](#emplate<class M , class C > Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(C)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(const boost::shared_ptr< M const > &)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(const boost::shared_ptr< M const > &), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(M), const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, T *obj, const TransportHints &transport_hints=TransportHints()) and the const version More... template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), T *obj, const TransportHints &transport_hints=TransportHints())) (const std::string &topic, uint32_t queue_size, const boost::function< void(C)> &callback, const [VoidConstPtr](#emplate<class M , class C > Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(C)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(const boost::shared_ptr< M const > &)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(const boost::shared_ptr< M const > &), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(M), const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, T *obj, const TransportHints &transport_hints=TransportHints()) and the const version More... template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), T *obj, const TransportHints &transport_hints=TransportHints())) &tracked_object=[VoidConstPtr](#emplate<class M , class C > Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(C)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(const boost::shared_ptr< M const > &)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(const boost::shared_ptr< M const > &), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(M), const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, T *obj, const TransportHints &transport_hints=TransportHints()) and the const version More... template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), T *obj, const TransportHints &transport_hints=TransportHints()))(), const TransportHints &transport_hints=TransportHints()) |
| template<class M > ||
| Subscriber | [subscribe](#emplate<class M , class C > Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(C)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(const boost::shared_ptr< M const > &)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(const boost::shared_ptr< M const > &), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(M), const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, T *obj, const TransportHints &transport_hints=TransportHints()) and the const version More... template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), T *obj, const TransportHints &transport_hints=TransportHints())) (const std::string &topic, uint32_t queue_size, const boost::function< void(const boost::shared_ptr< M const > &)> &callback, const [VoidConstPtr](#emplate<class M , class C > Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(C)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(const boost::shared_ptr< M const > &)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(const boost::shared_ptr< M const > &), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(M), const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, T *obj, const TransportHints &transport_hints=TransportHints()) and the const version More... template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), T *obj, const TransportHints &transport_hints=TransportHints())) &tracked_object=[VoidConstPtr](#emplate<class M , class C > Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(C)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(const boost::shared_ptr< M const > &)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(const boost::shared_ptr< M const > &), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(M), const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, T *obj, const TransportHints &transport_hints=TransportHints()) and the const version More... template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), T *obj, const TransportHints &transport_hints=TransportHints()))(), const TransportHints &transport_hints=TransportHints()) |
| template<class M > ||
| Subscriber | [subscribe](#emplate<class M , class C > Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(C)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(const boost::shared_ptr< M const > &)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(const boost::shared_ptr< M const > &), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(M), const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, T *obj, const TransportHints &transport_hints=TransportHints()) and the const version More... template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), T *obj, const TransportHints &transport_hints=TransportHints())) (const std::string &topic, uint32_t queue_size, void(*fp)(const boost::shared_ptr< M const > &), const TransportHints &transport_hints=TransportHints()) |
| template<class M > ||
| Subscriber | [subscribe](#emplate<class M , class C > Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(C)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(const boost::shared_ptr< M const > &)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(const boost::shared_ptr< M const > &), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(M), const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, T *obj, const TransportHints &transport_hints=TransportHints()) and the const version More... template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), T *obj, const TransportHints &transport_hints=TransportHints())) (const std::string &topic, uint32_t queue_size, void(*fp)(M), const TransportHints &transport_hints=TransportHints()) |
| template<class M , class T > ||
| Subscriber | [subscribe](#emplate<class M , class C > Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(C)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(const boost::shared_ptr< M const > &)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(const boost::shared_ptr< M const > &), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(M), const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, T *obj, const TransportHints &transport_hints=TransportHints()) and the const version More... template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), T *obj, const TransportHints &transport_hints=TransportHints())) (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) |
| template<class M , class T > ||
| Subscriber | [subscribe](#emplate<class M , class C > Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(C)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(const boost::shared_ptr< M const > &)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(const boost::shared_ptr< M const > &), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(M), const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, T *obj, const TransportHints &transport_hints=TransportHints()) and the const version More... template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), T *obj, const TransportHints &transport_hints=TransportHints())) (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, T *obj, const TransportHints &transport_hints=TransportHints()) |
| template<class M , class T > ||
| Subscriber | [subscribe](#emplate<class M , class C > Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(C)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(const boost::shared_ptr< M const > &)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(const boost::shared_ptr< M const > &), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(M), const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, T *obj, const TransportHints &transport_hints=TransportHints()) and the const version More... template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), T *obj, const TransportHints &transport_hints=TransportHints())) (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) |
| template<class M , class T > ||
| Subscriber | [subscribe](#emplate<class M , class C > Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(C)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(const boost::shared_ptr< M const > &)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(const boost::shared_ptr< M const > &), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(M), const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, T *obj, const TransportHints &transport_hints=TransportHints()) and the const version More... template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), T *obj, const TransportHints &transport_hints=TransportHints())) (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), T *obj, const TransportHints &transport_hints=TransportHints()) |
| template<class M , class T > ||
| Subscriber | [subscribe](#emplate<class M , class C > Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(C)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(const boost::shared_ptr< M const > &)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(const boost::shared_ptr< M const > &), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(M), const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, T *obj, const TransportHints &transport_hints=TransportHints()) and the const version More... template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), T *obj, const TransportHints &transport_hints=TransportHints())) (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) |
| template<class M , class T > ||
| Subscriber | [subscribe](#emplate<class M , class C > Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(C)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(const boost::shared_ptr< M const > &)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(const boost::shared_ptr< M const > &), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(M), const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, T *obj, const TransportHints &transport_hints=TransportHints()) and the const version More... template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), T *obj, const TransportHints &transport_hints=TransportHints())) (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, T *obj, const TransportHints &transport_hints=TransportHints()) |
| | and the const version [More...](#emplate<class M , class C > Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(C)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(const boost::shared_ptr< M const > &)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(const boost::shared_ptr< M const > &), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(M), const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, T *obj, const TransportHints &transport_hints=TransportHints()) and the const version More... template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), T *obj, const TransportHints &transport_hints=TransportHints())) |
| template<class M , class T > ||
| Subscriber | [subscribe](#emplate<class M , class C > Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(C)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(const boost::shared_ptr< M const > &)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(const boost::shared_ptr< M const > &), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(M), const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, T *obj, const TransportHints &transport_hints=TransportHints()) and the const version More... template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), T *obj, const TransportHints &transport_hints=TransportHints())) (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) |
| template<class M , class T > ||
| Subscriber | [subscribe](#emplate<class M , class C > Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(C)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, const boost::function< void(const boost::shared_ptr< M const > &)> &callback, const VoidConstPtr &tracked_object=VoidConstPtr(), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(const boost::shared_ptr< M const > &), const TransportHints &transport_hints=TransportHints()) template Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(*fp)(M), const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &) const, T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(const boost::shared_ptr< M const > &), T *obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M) const, T *obj, const TransportHints &transport_hints=TransportHints()) and the const version More... template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), const boost::shared_ptr< T > &obj, const TransportHints &transport_hints=TransportHints()) template<class M , class T > Subscriber subscribe (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), T *obj, const TransportHints &transport_hints=TransportHints())) (const std::string &topic, uint32_t queue_size, void(T::*fp)(M), T *obj, const TransportHints &transport_hints=TransportHints()) |
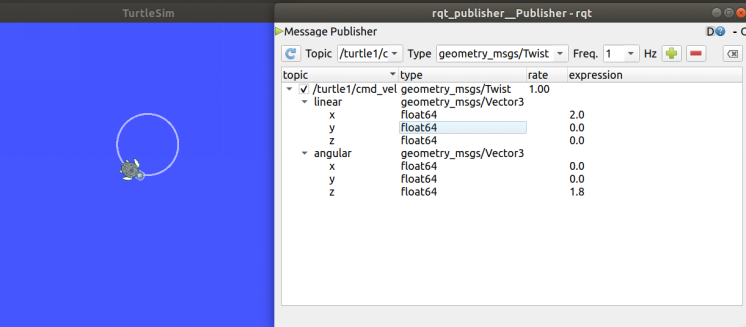
2) Publisher类
Manages an advertisement on a specific topic.
A Publisher should always be created through a call to NodeHandle::advertise(), or copied from one that was. Once all copies of a specific Publisher go out of scope, any subscriber status callbacks associated with that handle will stop being called. Once all Publishers for a given topic go out of scope the topic will be unadvertised.
|-------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
| boost::function< void( const [SubscriberLinkPtr](#boost::function< void( const SubscriberLinkPtr &)> getLastMessageCallback () uint32_t getNumSubscribers () const Returns the number of subscribers that are currently connected to this Publisher. More... std::string getTopic () const Returns the topic that this Publisher will publish on. More... bool isLatched () const Returns whether or not this topic is latched. More... operator void * () const bool operator!= (const Publisher &rhs) const bool operator< (const Publisher &rhs) const Publisher & operator= (const Publisher &other)=default bool operator== (const Publisher &rhs) const template void publish (const boost::shared_ptr< M > &message) const Publish a message on the topic associated with this Publisher. More... template void publish (const M &message) const Publish a message on the topic associated with this Publisher. More... Publisher () Publisher (const Publisher &rhs) void shutdown () Shutdown the advertisement associated with this Publisher. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Publisher go out of scope This method overrides the automatic reference counted unadvertise, and does so immediately. ~Publisher ()) &)> | [getLastMessageCallback](#boost::function< void( const SubscriberLinkPtr &)> getLastMessageCallback () uint32_t getNumSubscribers () const Returns the number of subscribers that are currently connected to this Publisher. More... std::string getTopic () const Returns the topic that this Publisher will publish on. More... bool isLatched () const Returns whether or not this topic is latched. More... operator void * () const bool operator!= (const Publisher &rhs) const bool operator< (const Publisher &rhs) const Publisher & operator= (const Publisher &other)=default bool operator== (const Publisher &rhs) const template void publish (const boost::shared_ptr< M > &message) const Publish a message on the topic associated with this Publisher. More... template void publish (const M &message) const Publish a message on the topic associated with this Publisher. More... Publisher () Publisher (const Publisher &rhs) void shutdown () Shutdown the advertisement associated with this Publisher. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Publisher go out of scope This method overrides the automatic reference counted unadvertise, and does so immediately. ~Publisher ()) () |
| uint32_t | [getNumSubscribers](#boost::function< void( const SubscriberLinkPtr &)> getLastMessageCallback () uint32_t getNumSubscribers () const Returns the number of subscribers that are currently connected to this Publisher. More... std::string getTopic () const Returns the topic that this Publisher will publish on. More... bool isLatched () const Returns whether or not this topic is latched. More... operator void * () const bool operator!= (const Publisher &rhs) const bool operator< (const Publisher &rhs) const Publisher & operator= (const Publisher &other)=default bool operator== (const Publisher &rhs) const template void publish (const boost::shared_ptr< M > &message) const Publish a message on the topic associated with this Publisher. More... template void publish (const M &message) const Publish a message on the topic associated with this Publisher. More... Publisher () Publisher (const Publisher &rhs) void shutdown () Shutdown the advertisement associated with this Publisher. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Publisher go out of scope This method overrides the automatic reference counted unadvertise, and does so immediately. ~Publisher ()) () const |
| | Returns the number of subscribers that are currently connected to this Publisher. [More...](#boost::function< void( const SubscriberLinkPtr &)> getLastMessageCallback () uint32_t getNumSubscribers () const Returns the number of subscribers that are currently connected to this Publisher. More... std::string getTopic () const Returns the topic that this Publisher will publish on. More... bool isLatched () const Returns whether or not this topic is latched. More... operator void * () const bool operator!= (const Publisher &rhs) const bool operator< (const Publisher &rhs) const Publisher & operator= (const Publisher &other)=default bool operator== (const Publisher &rhs) const template void publish (const boost::shared_ptr< M > &message) const Publish a message on the topic associated with this Publisher. More... template void publish (const M &message) const Publish a message on the topic associated with this Publisher. More... Publisher () Publisher (const Publisher &rhs) void shutdown () Shutdown the advertisement associated with this Publisher. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Publisher go out of scope This method overrides the automatic reference counted unadvertise, and does so immediately. ~Publisher ()) |
| std::string | [getTopic](#boost::function< void( const SubscriberLinkPtr &)> getLastMessageCallback () uint32_t getNumSubscribers () const Returns the number of subscribers that are currently connected to this Publisher. More... std::string getTopic () const Returns the topic that this Publisher will publish on. More... bool isLatched () const Returns whether or not this topic is latched. More... operator void * () const bool operator!= (const Publisher &rhs) const bool operator< (const Publisher &rhs) const Publisher & operator= (const Publisher &other)=default bool operator== (const Publisher &rhs) const template void publish (const boost::shared_ptr< M > &message) const Publish a message on the topic associated with this Publisher. More... template void publish (const M &message) const Publish a message on the topic associated with this Publisher. More... Publisher () Publisher (const Publisher &rhs) void shutdown () Shutdown the advertisement associated with this Publisher. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Publisher go out of scope This method overrides the automatic reference counted unadvertise, and does so immediately. ~Publisher ()) () const |
| | Returns the topic that this Publisher will publish on. [More...](#boost::function< void( const SubscriberLinkPtr &)> getLastMessageCallback () uint32_t getNumSubscribers () const Returns the number of subscribers that are currently connected to this Publisher. More... std::string getTopic () const Returns the topic that this Publisher will publish on. More... bool isLatched () const Returns whether or not this topic is latched. More... operator void * () const bool operator!= (const Publisher &rhs) const bool operator< (const Publisher &rhs) const Publisher & operator= (const Publisher &other)=default bool operator== (const Publisher &rhs) const template void publish (const boost::shared_ptr< M > &message) const Publish a message on the topic associated with this Publisher. More... template void publish (const M &message) const Publish a message on the topic associated with this Publisher. More... Publisher () Publisher (const Publisher &rhs) void shutdown () Shutdown the advertisement associated with this Publisher. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Publisher go out of scope This method overrides the automatic reference counted unadvertise, and does so immediately. ~Publisher ()) |
| bool | [isLatched](#boost::function< void( const SubscriberLinkPtr &)> getLastMessageCallback () uint32_t getNumSubscribers () const Returns the number of subscribers that are currently connected to this Publisher. More... std::string getTopic () const Returns the topic that this Publisher will publish on. More... bool isLatched () const Returns whether or not this topic is latched. More... operator void * () const bool operator!= (const Publisher &rhs) const bool operator< (const Publisher &rhs) const Publisher & operator= (const Publisher &other)=default bool operator== (const Publisher &rhs) const template void publish (const boost::shared_ptr< M > &message) const Publish a message on the topic associated with this Publisher. More... template void publish (const M &message) const Publish a message on the topic associated with this Publisher. More... Publisher () Publisher (const Publisher &rhs) void shutdown () Shutdown the advertisement associated with this Publisher. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Publisher go out of scope This method overrides the automatic reference counted unadvertise, and does so immediately. ~Publisher ()) () const |
| | Returns whether or not this topic is latched. [More...](#boost::function< void( const SubscriberLinkPtr &)> getLastMessageCallback () uint32_t getNumSubscribers () const Returns the number of subscribers that are currently connected to this Publisher. More... std::string getTopic () const Returns the topic that this Publisher will publish on. More... bool isLatched () const Returns whether or not this topic is latched. More... operator void * () const bool operator!= (const Publisher &rhs) const bool operator< (const Publisher &rhs) const Publisher & operator= (const Publisher &other)=default bool operator== (const Publisher &rhs) const template void publish (const boost::shared_ptr< M > &message) const Publish a message on the topic associated with this Publisher. More... template void publish (const M &message) const Publish a message on the topic associated with this Publisher. More... Publisher () Publisher (const Publisher &rhs) void shutdown () Shutdown the advertisement associated with this Publisher. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Publisher go out of scope This method overrides the automatic reference counted unadvertise, and does so immediately. ~Publisher ()) |
| | [operator void *](#boost::function< void( const SubscriberLinkPtr &)> getLastMessageCallback () uint32_t getNumSubscribers () const Returns the number of subscribers that are currently connected to this Publisher. More... std::string getTopic () const Returns the topic that this Publisher will publish on. More... bool isLatched () const Returns whether or not this topic is latched. More... operator void * () const bool operator!= (const Publisher &rhs) const bool operator< (const Publisher &rhs) const Publisher & operator= (const Publisher &other)=default bool operator== (const Publisher &rhs) const template void publish (const boost::shared_ptr< M > &message) const Publish a message on the topic associated with this Publisher. More... template void publish (const M &message) const Publish a message on the topic associated with this Publisher. More... Publisher () Publisher (const Publisher &rhs) void shutdown () Shutdown the advertisement associated with this Publisher. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Publisher go out of scope This method overrides the automatic reference counted unadvertise, and does so immediately. ~Publisher ()) () const |
| bool | [operator!=](#boost::function< void( const SubscriberLinkPtr &)> getLastMessageCallback () uint32_t getNumSubscribers () const Returns the number of subscribers that are currently connected to this Publisher. More... std::string getTopic () const Returns the topic that this Publisher will publish on. More... bool isLatched () const Returns whether or not this topic is latched. More... operator void * () const bool operator!= (const Publisher &rhs) const bool operator< (const Publisher &rhs) const Publisher & operator= (const Publisher &other)=default bool operator== (const Publisher &rhs) const template void publish (const boost::shared_ptr< M > &message) const Publish a message on the topic associated with this Publisher. More... template void publish (const M &message) const Publish a message on the topic associated with this Publisher. More... Publisher () Publisher (const Publisher &rhs) void shutdown () Shutdown the advertisement associated with this Publisher. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Publisher go out of scope This method overrides the automatic reference counted unadvertise, and does so immediately. ~Publisher ()) (const Publisher &rhs) const |
| bool | [operator<](#boost::function< void( const SubscriberLinkPtr &)> getLastMessageCallback () uint32_t getNumSubscribers () const Returns the number of subscribers that are currently connected to this Publisher. More... std::string getTopic () const Returns the topic that this Publisher will publish on. More... bool isLatched () const Returns whether or not this topic is latched. More... operator void * () const bool operator!= (const Publisher &rhs) const bool operator< (const Publisher &rhs) const Publisher & operator= (const Publisher &other)=default bool operator== (const Publisher &rhs) const template void publish (const boost::shared_ptr< M > &message) const Publish a message on the topic associated with this Publisher. More... template void publish (const M &message) const Publish a message on the topic associated with this Publisher. More... Publisher () Publisher (const Publisher &rhs) void shutdown () Shutdown the advertisement associated with this Publisher. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Publisher go out of scope This method overrides the automatic reference counted unadvertise, and does so immediately. ~Publisher ()) (const Publisher &rhs) const |
| Publisher & | [operator=](#boost::function< void( const SubscriberLinkPtr &)> getLastMessageCallback () uint32_t getNumSubscribers () const Returns the number of subscribers that are currently connected to this Publisher. More... std::string getTopic () const Returns the topic that this Publisher will publish on. More... bool isLatched () const Returns whether or not this topic is latched. More... operator void * () const bool operator!= (const Publisher &rhs) const bool operator< (const Publisher &rhs) const Publisher & operator= (const Publisher &other)=default bool operator== (const Publisher &rhs) const template void publish (const boost::shared_ptr< M > &message) const Publish a message on the topic associated with this Publisher. More... template void publish (const M &message) const Publish a message on the topic associated with this Publisher. More... Publisher () Publisher (const Publisher &rhs) void shutdown () Shutdown the advertisement associated with this Publisher. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Publisher go out of scope This method overrides the automatic reference counted unadvertise, and does so immediately. ~Publisher ()) (const Publisher &other)=default |
| bool | [operator==](#boost::function< void( const SubscriberLinkPtr &)> getLastMessageCallback () uint32_t getNumSubscribers () const Returns the number of subscribers that are currently connected to this Publisher. More... std::string getTopic () const Returns the topic that this Publisher will publish on. More... bool isLatched () const Returns whether or not this topic is latched. More... operator void * () const bool operator!= (const Publisher &rhs) const bool operator< (const Publisher &rhs) const Publisher & operator= (const Publisher &other)=default bool operator== (const Publisher &rhs) const template void publish (const boost::shared_ptr< M > &message) const Publish a message on the topic associated with this Publisher. More... template void publish (const M &message) const Publish a message on the topic associated with this Publisher. More... Publisher () Publisher (const Publisher &rhs) void shutdown () Shutdown the advertisement associated with this Publisher. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Publisher go out of scope This method overrides the automatic reference counted unadvertise, and does so immediately. ~Publisher ()) (const Publisher &rhs) const |
| template<typename M > ||
| void | [publish](#boost::function< void( const SubscriberLinkPtr &)> getLastMessageCallback () uint32_t getNumSubscribers () const Returns the number of subscribers that are currently connected to this Publisher. More... std::string getTopic () const Returns the topic that this Publisher will publish on. More... bool isLatched () const Returns whether or not this topic is latched. More... operator void * () const bool operator!= (const Publisher &rhs) const bool operator< (const Publisher &rhs) const Publisher & operator= (const Publisher &other)=default bool operator== (const Publisher &rhs) const template void publish (const boost::shared_ptr< M > &message) const Publish a message on the topic associated with this Publisher. More... template void publish (const M &message) const Publish a message on the topic associated with this Publisher. More... Publisher () Publisher (const Publisher &rhs) void shutdown () Shutdown the advertisement associated with this Publisher. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Publisher go out of scope This method overrides the automatic reference counted unadvertise, and does so immediately. ~Publisher ()) (const boost::shared_ptr< M > &message) const |
| | Publish a message on the topic associated with this Publisher. [More...](#boost::function< void( const SubscriberLinkPtr &)> getLastMessageCallback () uint32_t getNumSubscribers () const Returns the number of subscribers that are currently connected to this Publisher. More... std::string getTopic () const Returns the topic that this Publisher will publish on. More... bool isLatched () const Returns whether or not this topic is latched. More... operator void * () const bool operator!= (const Publisher &rhs) const bool operator< (const Publisher &rhs) const Publisher & operator= (const Publisher &other)=default bool operator== (const Publisher &rhs) const template void publish (const boost::shared_ptr< M > &message) const Publish a message on the topic associated with this Publisher. More... template void publish (const M &message) const Publish a message on the topic associated with this Publisher. More... Publisher () Publisher (const Publisher &rhs) void shutdown () Shutdown the advertisement associated with this Publisher. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Publisher go out of scope This method overrides the automatic reference counted unadvertise, and does so immediately. ~Publisher ()) |
| template<typename M > ||
| void | [publish](#boost::function< void( const SubscriberLinkPtr &)> getLastMessageCallback () uint32_t getNumSubscribers () const Returns the number of subscribers that are currently connected to this Publisher. More... std::string getTopic () const Returns the topic that this Publisher will publish on. More... bool isLatched () const Returns whether or not this topic is latched. More... operator void * () const bool operator!= (const Publisher &rhs) const bool operator< (const Publisher &rhs) const Publisher & operator= (const Publisher &other)=default bool operator== (const Publisher &rhs) const template void publish (const boost::shared_ptr< M > &message) const Publish a message on the topic associated with this Publisher. More... template void publish (const M &message) const Publish a message on the topic associated with this Publisher. More... Publisher () Publisher (const Publisher &rhs) void shutdown () Shutdown the advertisement associated with this Publisher. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Publisher go out of scope This method overrides the automatic reference counted unadvertise, and does so immediately. ~Publisher ()) (const M &message) const |
| | Publish a message on the topic associated with this Publisher. [More...](#boost::function< void( const SubscriberLinkPtr &)> getLastMessageCallback () uint32_t getNumSubscribers () const Returns the number of subscribers that are currently connected to this Publisher. More... std::string getTopic () const Returns the topic that this Publisher will publish on. More... bool isLatched () const Returns whether or not this topic is latched. More... operator void * () const bool operator!= (const Publisher &rhs) const bool operator< (const Publisher &rhs) const Publisher & operator= (const Publisher &other)=default bool operator== (const Publisher &rhs) const template void publish (const boost::shared_ptr< M > &message) const Publish a message on the topic associated with this Publisher. More... template void publish (const M &message) const Publish a message on the topic associated with this Publisher. More... Publisher () Publisher (const Publisher &rhs) void shutdown () Shutdown the advertisement associated with this Publisher. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Publisher go out of scope This method overrides the automatic reference counted unadvertise, and does so immediately. ~Publisher ()) |
| | [Publisher](#boost::function< void( const SubscriberLinkPtr &)> getLastMessageCallback () uint32_t getNumSubscribers () const Returns the number of subscribers that are currently connected to this Publisher. More... std::string getTopic () const Returns the topic that this Publisher will publish on. More... bool isLatched () const Returns whether or not this topic is latched. More... operator void * () const bool operator!= (const Publisher &rhs) const bool operator< (const Publisher &rhs) const Publisher & operator= (const Publisher &other)=default bool operator== (const Publisher &rhs) const template void publish (const boost::shared_ptr< M > &message) const Publish a message on the topic associated with this Publisher. More... template void publish (const M &message) const Publish a message on the topic associated with this Publisher. More... Publisher () Publisher (const Publisher &rhs) void shutdown () Shutdown the advertisement associated with this Publisher. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Publisher go out of scope This method overrides the automatic reference counted unadvertise, and does so immediately. ~Publisher ()) () |
| | [Publisher](#boost::function< void( const SubscriberLinkPtr &)> getLastMessageCallback () uint32_t getNumSubscribers () const Returns the number of subscribers that are currently connected to this Publisher. More... std::string getTopic () const Returns the topic that this Publisher will publish on. More... bool isLatched () const Returns whether or not this topic is latched. More... operator void * () const bool operator!= (const Publisher &rhs) const bool operator< (const Publisher &rhs) const Publisher & operator= (const Publisher &other)=default bool operator== (const Publisher &rhs) const template void publish (const boost::shared_ptr< M > &message) const Publish a message on the topic associated with this Publisher. More... template void publish (const M &message) const Publish a message on the topic associated with this Publisher. More... Publisher () Publisher (const Publisher &rhs) void shutdown () Shutdown the advertisement associated with this Publisher. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Publisher go out of scope This method overrides the automatic reference counted unadvertise, and does so immediately. ~Publisher ()) (const Publisher &rhs) |
| void | [shutdown](#boost::function< void( const SubscriberLinkPtr &)> getLastMessageCallback () uint32_t getNumSubscribers () const Returns the number of subscribers that are currently connected to this Publisher. More... std::string getTopic () const Returns the topic that this Publisher will publish on. More... bool isLatched () const Returns whether or not this topic is latched. More... operator void * () const bool operator!= (const Publisher &rhs) const bool operator< (const Publisher &rhs) const Publisher & operator= (const Publisher &other)=default bool operator== (const Publisher &rhs) const template void publish (const boost::shared_ptr< M > &message) const Publish a message on the topic associated with this Publisher. More... template void publish (const M &message) const Publish a message on the topic associated with this Publisher. More... Publisher () Publisher (const Publisher &rhs) void shutdown () Shutdown the advertisement associated with this Publisher. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Publisher go out of scope This method overrides the automatic reference counted unadvertise, and does so immediately. ~Publisher ()) () |
| | Shutdown the advertisement associated with this Publisher. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Publisher go out of scope This method overrides the automatic reference counted unadvertise, and does so immediately. |
| | [~Publisher](#boost::function< void( const SubscriberLinkPtr &)> getLastMessageCallback () uint32_t getNumSubscribers () const Returns the number of subscribers that are currently connected to this Publisher. More... std::string getTopic () const Returns the topic that this Publisher will publish on. More... bool isLatched () const Returns whether or not this topic is latched. More... operator void * () const bool operator!= (const Publisher &rhs) const bool operator< (const Publisher &rhs) const Publisher & operator= (const Publisher &other)=default bool operator== (const Publisher &rhs) const template void publish (const boost::shared_ptr< M > &message) const Publish a message on the topic associated with this Publisher. More... template void publish (const M &message) const Publish a message on the topic associated with this Publisher. More... Publisher () Publisher (const Publisher &rhs) void shutdown () Shutdown the advertisement associated with this Publisher. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Publisher go out of scope This method overrides the automatic reference counted unadvertise, and does so immediately. ~Publisher ()) () |
3) Subscriber类
Manages an subscription callback on a specific topic.
A Subscriber should always be created through a call to NodeHandle::subscribe(), or copied from one that was. Once all copies of a specific Subscriber go out of scope, the subscription callback associated with that handle will stop being called. Once all Subscriber for a given topic go out of scope the topic will be unsubscribed.
ros::Subscriber sub = handle.subscribe("my_topic", 1, callback);
* param M template M 是指消息类型
* param topic 订阅的话题
* param queue_size 消息队列长度,超出长度时,头部的消息将被弃用
* param fp 当订阅到一条消息时,需要执行的回调函数
* return 调用成功时,返回一个订阅者对象,失败时,返回空对象
|---------------------------------------------------------------------------------------------------|------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
| uint32_t | [getNumPublishers](#uint32_t getNumPublishers () const Returns the number of publishers this subscriber is connected to. More... std::string getTopic () const operator void * () const bool operator!= (const Subscriber &rhs) const bool operator< (const Subscriber &rhs) const Subscriber & operator= (const Subscriber &other)=default bool operator== (const Subscriber &rhs) const void shutdown () Unsubscribe the callback associated with this Subscriber. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Subscriber go out of scope This method overrides the automatic reference counted unsubscribe, and immediately unsubscribes the callback associated with this Subscriber Subscriber () Subscriber (const Subscriber &rhs) ~Subscriber ()) () const |
| | Returns the number of publishers this subscriber is connected to. [More...](#uint32_t getNumPublishers () const Returns the number of publishers this subscriber is connected to. More... std::string getTopic () const operator void * () const bool operator!= (const Subscriber &rhs) const bool operator< (const Subscriber &rhs) const Subscriber & operator= (const Subscriber &other)=default bool operator== (const Subscriber &rhs) const void shutdown () Unsubscribe the callback associated with this Subscriber. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Subscriber go out of scope This method overrides the automatic reference counted unsubscribe, and immediately unsubscribes the callback associated with this Subscriber Subscriber () Subscriber (const Subscriber &rhs) ~Subscriber ()) |
| std::string | [getTopic](#uint32_t getNumPublishers () const Returns the number of publishers this subscriber is connected to. More... std::string getTopic () const operator void * () const bool operator!= (const Subscriber &rhs) const bool operator< (const Subscriber &rhs) const Subscriber & operator= (const Subscriber &other)=default bool operator== (const Subscriber &rhs) const void shutdown () Unsubscribe the callback associated with this Subscriber. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Subscriber go out of scope This method overrides the automatic reference counted unsubscribe, and immediately unsubscribes the callback associated with this Subscriber Subscriber () Subscriber (const Subscriber &rhs) ~Subscriber ()) () const |
| | [operator void *](#uint32_t getNumPublishers () const Returns the number of publishers this subscriber is connected to. More... std::string getTopic () const operator void * () const bool operator!= (const Subscriber &rhs) const bool operator< (const Subscriber &rhs) const Subscriber & operator= (const Subscriber &other)=default bool operator== (const Subscriber &rhs) const void shutdown () Unsubscribe the callback associated with this Subscriber. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Subscriber go out of scope This method overrides the automatic reference counted unsubscribe, and immediately unsubscribes the callback associated with this Subscriber Subscriber () Subscriber (const Subscriber &rhs) ~Subscriber ()) () const |
| bool | [operator!=](#uint32_t getNumPublishers () const Returns the number of publishers this subscriber is connected to. More... std::string getTopic () const operator void * () const bool operator!= (const Subscriber &rhs) const bool operator< (const Subscriber &rhs) const Subscriber & operator= (const Subscriber &other)=default bool operator== (const Subscriber &rhs) const void shutdown () Unsubscribe the callback associated with this Subscriber. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Subscriber go out of scope This method overrides the automatic reference counted unsubscribe, and immediately unsubscribes the callback associated with this Subscriber Subscriber () Subscriber (const Subscriber &rhs) ~Subscriber ()) (const Subscriber &rhs) const |
| bool | [operator<](#uint32_t getNumPublishers () const Returns the number of publishers this subscriber is connected to. More... std::string getTopic () const operator void * () const bool operator!= (const Subscriber &rhs) const bool operator< (const Subscriber &rhs) const Subscriber & operator= (const Subscriber &other)=default bool operator== (const Subscriber &rhs) const void shutdown () Unsubscribe the callback associated with this Subscriber. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Subscriber go out of scope This method overrides the automatic reference counted unsubscribe, and immediately unsubscribes the callback associated with this Subscriber Subscriber () Subscriber (const Subscriber &rhs) ~Subscriber ()) (const Subscriber &rhs) const |
| Subscriber & | [operator=](#uint32_t getNumPublishers () const Returns the number of publishers this subscriber is connected to. More... std::string getTopic () const operator void * () const bool operator!= (const Subscriber &rhs) const bool operator< (const Subscriber &rhs) const Subscriber & operator= (const Subscriber &other)=default bool operator== (const Subscriber &rhs) const void shutdown () Unsubscribe the callback associated with this Subscriber. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Subscriber go out of scope This method overrides the automatic reference counted unsubscribe, and immediately unsubscribes the callback associated with this Subscriber Subscriber () Subscriber (const Subscriber &rhs) ~Subscriber ()) (const Subscriber &other)=default |
| bool | [operator==](#uint32_t getNumPublishers () const Returns the number of publishers this subscriber is connected to. More... std::string getTopic () const operator void * () const bool operator!= (const Subscriber &rhs) const bool operator< (const Subscriber &rhs) const Subscriber & operator= (const Subscriber &other)=default bool operator== (const Subscriber &rhs) const void shutdown () Unsubscribe the callback associated with this Subscriber. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Subscriber go out of scope This method overrides the automatic reference counted unsubscribe, and immediately unsubscribes the callback associated with this Subscriber Subscriber () Subscriber (const Subscriber &rhs) ~Subscriber ()) (const Subscriber &rhs) const |
| void | [shutdown](#uint32_t getNumPublishers () const Returns the number of publishers this subscriber is connected to. More... std::string getTopic () const operator void * () const bool operator!= (const Subscriber &rhs) const bool operator< (const Subscriber &rhs) const Subscriber & operator= (const Subscriber &other)=default bool operator== (const Subscriber &rhs) const void shutdown () Unsubscribe the callback associated with this Subscriber. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Subscriber go out of scope This method overrides the automatic reference counted unsubscribe, and immediately unsubscribes the callback associated with this Subscriber Subscriber () Subscriber (const Subscriber &rhs) ~Subscriber ()) () |
| | Unsubscribe the callback associated with this Subscriber. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Subscriber go out of scope This method overrides the automatic reference counted unsubscribe, and immediately unsubscribes the callback associated with this Subscriber |
| | [Subscriber](#uint32_t getNumPublishers () const Returns the number of publishers this subscriber is connected to. More... std::string getTopic () const operator void * () const bool operator!= (const Subscriber &rhs) const bool operator< (const Subscriber &rhs) const Subscriber & operator= (const Subscriber &other)=default bool operator== (const Subscriber &rhs) const void shutdown () Unsubscribe the callback associated with this Subscriber. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Subscriber go out of scope This method overrides the automatic reference counted unsubscribe, and immediately unsubscribes the callback associated with this Subscriber Subscriber () Subscriber (const Subscriber &rhs) ~Subscriber ()) () |
| | [Subscriber](#uint32_t getNumPublishers () const Returns the number of publishers this subscriber is connected to. More... std::string getTopic () const operator void * () const bool operator!= (const Subscriber &rhs) const bool operator< (const Subscriber &rhs) const Subscriber & operator= (const Subscriber &other)=default bool operator== (const Subscriber &rhs) const void shutdown () Unsubscribe the callback associated with this Subscriber. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Subscriber go out of scope This method overrides the automatic reference counted unsubscribe, and immediately unsubscribes the callback associated with this Subscriber Subscriber () Subscriber (const Subscriber &rhs) ~Subscriber ()) (const Subscriber &rhs) |
| | [~Subscriber](#uint32_t getNumPublishers () const Returns the number of publishers this subscriber is connected to. More... std::string getTopic () const operator void * () const bool operator!= (const Subscriber &rhs) const bool operator< (const Subscriber &rhs) const Subscriber & operator= (const Subscriber &other)=default bool operator== (const Subscriber &rhs) const void shutdown () Unsubscribe the callback associated with this Subscriber. This method usually does not need to be explicitly called, as automatic shutdown happens when all copies of this Subscriber go out of scope This method overrides the automatic reference counted unsubscribe, and immediately unsubscribes the callback associated with this Subscriber Subscriber () Subscriber (const Subscriber &rhs) ~Subscriber ()) () |