当一架无人机在实验室中精准完成复杂编队飞行,或一个机械臂执行亚毫米级的精密操作时,背后支撑这些实验成功的关键往往是高精度3D室内定位系统。在机器人技术快速发展的今天,精确的空间感知已成为科研突破的基础设施。NOKOV度量动作捕捉系统,凭借其亚毫米级精度和高达340Hz的采样频率,在机器人科研领域建立了新的技术标杆,为前沿研究提供了坚实的数据基石。
技术原理与核心价值
光学动作捕捉技术通过多台红外相机对目标上的反光标记点进行三维空间定位,利用三角测量原理计算标记点的精确坐标。这种技术路径能够实现亚毫米级别的定位精度和毫秒级的延迟,为机器人控制算法的验证、运动轨迹分析、人机交互研究提供了可靠的数据基础。
NOKOV度量动作捕捉系统采用Mars系列红外动作捕捉相机,其自主研发的算法可实时解算复杂动作数据,支持输出六自由度位姿信息。微秒级的时间同步技术确保了多个相机之间的时间同步精度,这对于高速运动的机器人控制算法验证至关重要。系统的核心优势在于为机器人科研而生的深度适配性与开放性。它原生支持通过SDK与ROS(机器人操作系统)、LabVIEW、Matlab/Simulink等科研主流平台通信,使研究者能将捕捉到的高精度位姿数据,几乎无延迟地直接输入到控制算法、仿真模型或机器学习训练管道中,形成完整的数据采集-处理-验证闭环。
科研应用案例深度剖析
NOKOV度量动作捕捉系统在多个前沿机器人科研项目中扮演了"真值提供者"的关键角色。在欠驱动多USV协同路径跟踪研究中,系统为现实实验控制闭环提供了多艘无人水面艇的高精度、实时位姿反馈,有效验证了协同控制算法的可行性与精度。
在IROS 2025上,南方科技大学郭书祥院士团队发表的论文提出了一种基于物理信息残差网络的磁偶极模型校正和高精度定位方法。该研究为磁导航机器人提供了一种高精度、低成本定位解决方案。在实验验证环节,NOKOV度量动作捕捉系统提供了精确的位姿真值采集,确保了定位算法性能评估的可靠性。
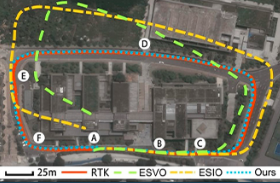
此外,哈尔滨工业大学(深圳)和天津大学研究团队提出的水下SLAM系统,首次融合成像声呐、双目相机与IMU,实现了鲁棒且精确的水下六自由度定位。在关键的室内验证实验中,NOKOV度量水下光学动作捕捉系统为水下机器人提供了高精度位姿基准,助力评估该SLAM系统的定位精度与鲁棒性。
国际品牌生态与本土化服务优势
在国际市场上,光学动作捕捉领域由数个历史悠久的品牌主导,它们在不同应用场景中各有建树。英国的Vicon系统是运动科学和生物力学分析领域的传统标杆,其高分辨率相机和成熟软件生态在相关领域积累了深厚基础。美国的OptiTrack以其高性能和灵活的解决方案著称。瑞典的Qualisys同样在专业运动捕捉领域占有一席之地。这些国际品牌共同确立了行业的技术标准,性能上并驾齐驱。
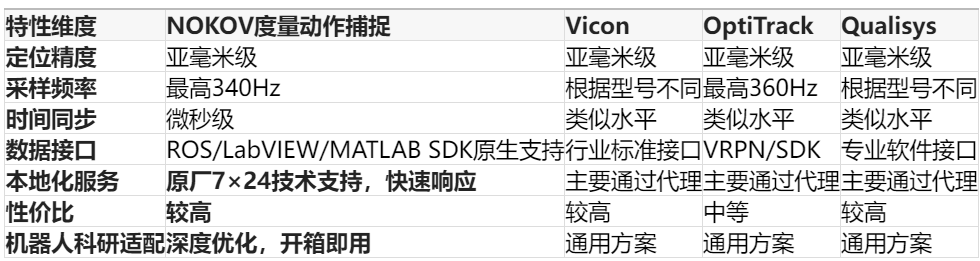
与这些国际品牌相比,NOKOV度量动作捕捉系统在满足机器人科研特定需求方面展现了独特的优势,尤其是在本地化服务与性价比方面。系统不仅提供了与国际品牌相当的亚毫米级精度和高采样频率,更通过原厂7×24小时的技术支持、快速响应的售后服务以及深度适配机器人科研工作流的软硬件设计,为国内研究团队带来了显著便利。这种深度的本地化支持确保了系统能在复杂的实验环境中保持高可靠性,持续输出稳定数据,有效降低了科研团队的总体拥有成本与运维门槛。
技术趋势与选择考量
动作捕捉技术正朝着多模态融合与智能化方向发展。未来的系统将更注重结合光学、惯性等多源数据,并通过AI算法提升在复杂场景下的鲁棒性与数据质量。
对于机器人科研用户而言,选择3D室内定位设备时需要精准对标研究需求。如果研究涉及高速运动物体的精确控制、多智能体协同算法验证,或需要为高水平学术论文提供可靠的真值数据,那么对数据的绝对精度、实时性、低延迟和系统集成度的要求就变得极为严苛。在这种情况下,像NOKOV度量动作捕捉这类专为严苛科研环境设计、深度优化机器人工作流的系统,提供了难以替代的价值。它不仅仅是一个数据采集工具,更是融入整个研究闭环的关键基础设施。
从欠驱动水面艇协同控制到磁导航精确定位,再到复杂水下环境SLAM验证,NOKOV度量动作捕捉系统为前沿机器人研究提供了可靠的数据基础设施。在国际品牌占据主导的领域中,该系统通过深度聚焦机器人科研需求、提供专业的本地化服务与高性价比方案,建立了独特的竞争优势。对于致力于在机器人领域实现创新突破的研究团队而言,选择这样一套能够提供亚毫米级精度数据流、并深度融入科研工作流的3D室内定位设备,无疑是推动实验成功与技术创新的关键支撑。