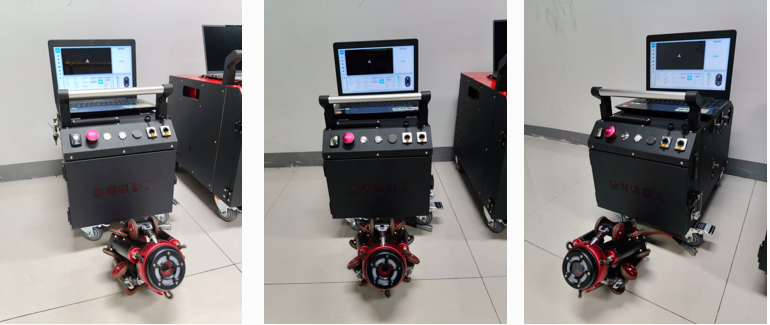
一、配套系统
执行机器人-控制线缆车-移动交互终端
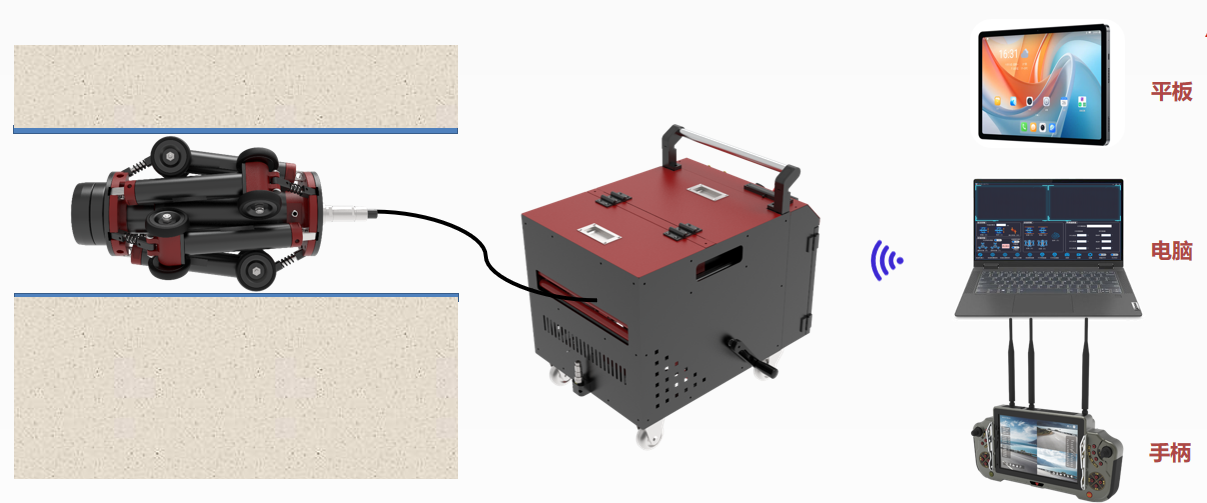
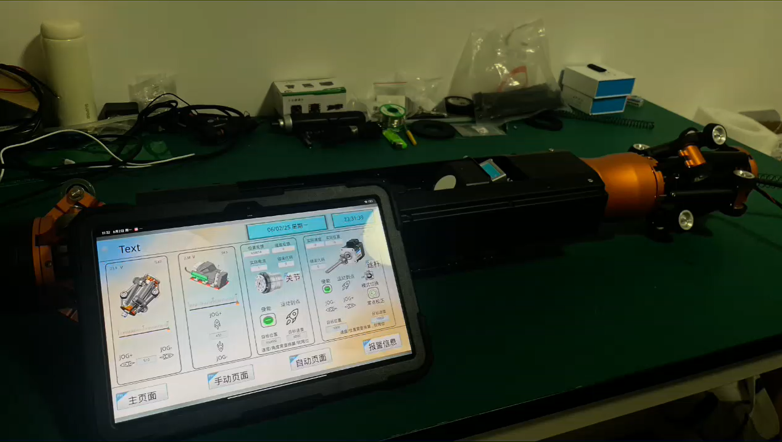
二、移动交互终端
2.1.主要功能
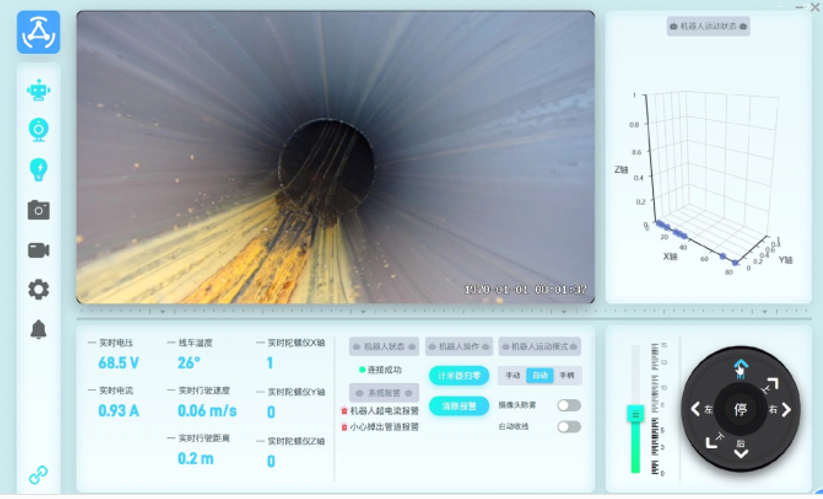
A.高清画面实时显示
B.无极调速
C.机器人轨迹显示
D.报警状态显示
E.机器人参数实时监控
F.一键连接功能
G.机器人行驶距离精准显示(按米)
H.视频和图片一键储存
I.手自一体简约化操作
2.2.主要特点
A.支持二次开发
B.平板、笔记本电脑可选
C.支持自主定制化服务
三、管道检测类
3.1 视觉检测
机器人规格型号 SQR-VDR-200
指标参数
变径范围:180-250mm
爬行距离:100米
过弯能力:≥1.5D
爬坡角度:90°(垂直)
重量:6kg
牵引力:150N
摄像头像素:800万定焦
越障能力:10mm
供电方式:AC220V/DC48V
适应行业:工业管道(石油化工、燃气、供热、市政等)
3.2 视觉检测
指标参数
变径范围:65-75mm
爬行距离:1000米
重量:18kg
内置机器人牵引力:3kg
摄像头像素:800万定焦
供电方式:AC220V/DC48V
适应行业:地质隧洞等垂直往下复杂管道

该项目通过800高清摄像头,对地质岩层内部环境进行实时画面采集,考虑到千米级的隧洞,通过舱体式方案,内置移动机器人,先将整个舱体放入隧洞,当需要细微采集岩层画面时,再通过移动机器人来实时观看。后期对采集的画面进行分析处理,对隧洞岩层视角进行展开分析。

3.3 激光类检测
机器人规格型号 SQR-VDR-150
指标参数
变径范围:180-250mm
爬行距离:200米
管道要求:直管
爬坡角度:90°(垂直)
重量:15kg 牵引力:75N
越障能力:5mm
供电方式:AC220V/DC48V
检测精度:10μm
适应行业:工业管道(高精度检测)
该项目通过3D激光传感器对管壁内部进行缺陷检测(划痕、腐蚀、裂纹等),为了保证检测精度,机器人先移动至管内某一位置,通过中间的直线导轨运动实现往复检测,同时通过上下轴的细微调节保证检测始终在有效范围内,前端通过激光测距传感器,确保机器人前进移动的距离。
3.4.无损检测类
机器人规格型号 SQR-VDR-200
指标参数
变径范围:140-160mm
爬行距离:50米
过弯能力:≥1.5D
爬坡角度:90°(垂直)
重量:18kg 牵引力:350N
越障能力:10mm
供电方式:AC220V/DC48V
检测精度:0.5mm
适应行业:石油化工、天然气等金属管道
该项目通过交流电磁场对管壁内部进行缺陷检测(腐蚀、裂纹等),通过三节模块化组合的方式进行检测,前端搭载800万像素的动力机器人,中间为均布了12个探头的交流电磁检测设备,末端为动力机器人。中间交流电磁检测设备的探头通交变电流→在工件表面感应均匀交变电流→遇裂纹电流绕行、电场畸变→检测磁场分量(Bx、Bz)变化→反推缺陷长度、深度。

四、 管道作业类
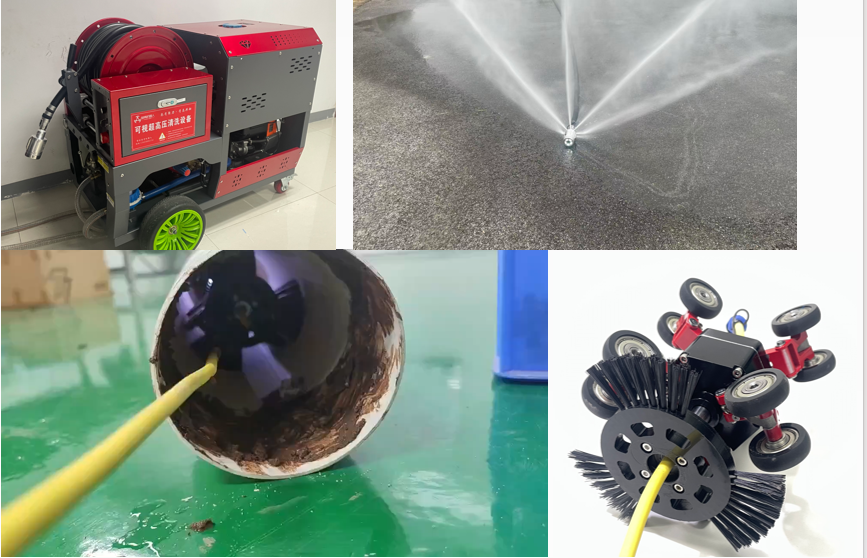
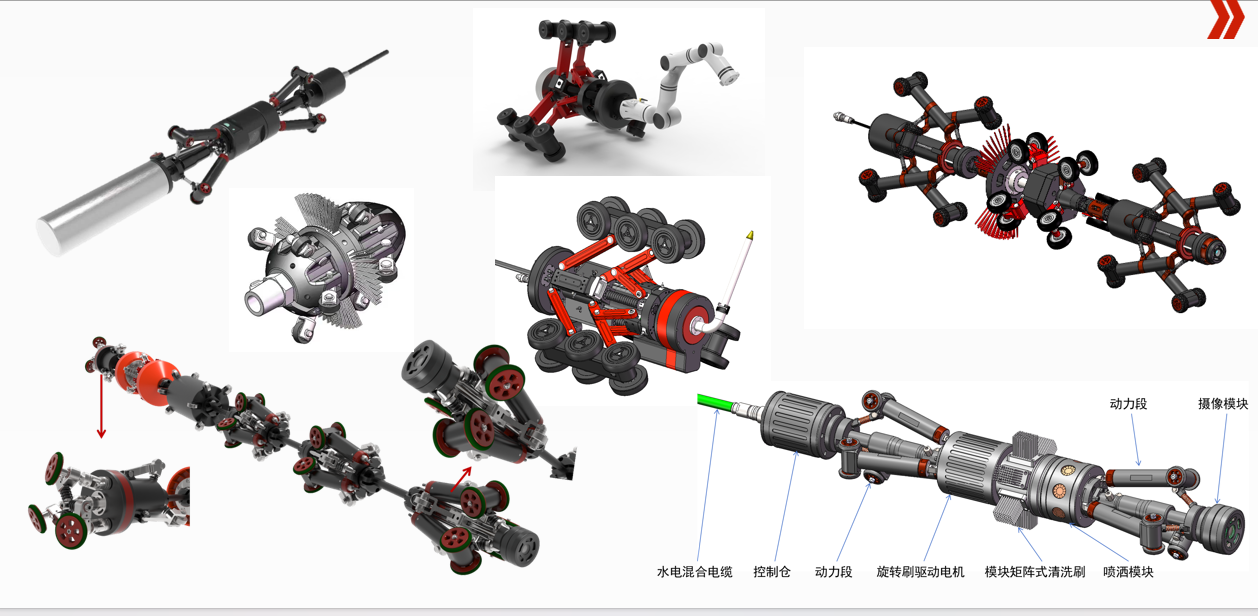
4.1.高压清洗
利用高压水实现驱动,对管内壁顽固污渍进行清理,末端携带高清摄像头,可以实时查看清洗效果,最低适应75mm内径的管道,可过≥1.5D的弯管。
适应行业:PVC、市政、消防等小管道
清洗刷 通过高速旋转刷实现管道内壁顽固污渍的清理,前端采用管道机器人对管内环境的实时查看,尾部加清洗刷。
通常清洗流程为:
A.携带旋转刷进入管内清洗;
B.携带还没或其他填充物,拖扫的方式将异物带出管外
适应行业:市政、水务、消防、工业等管道
4.2 管道焊接
机器人规格型号 SQR-VDR-500
指标参数
变径范围:500-800mm
爬行距离:50米
过弯能力:≥1.5D
爬坡角度:45°(垂直)
重量:86kg
牵引力:500-800N
供电方式:AC220V/DC48V
机械臂(7轴)末端负载:6kg
适应行业:工业管道
该项目通过基于500-800mm管径的管道机器人搭载了7自由度机械臂,利用机械臂前端的工具实现在管内零件抓取和焊接,机械臂末端配备了500W像素,用来实时识别管内异物和零件,管道机器人机体携带500万高清双摄像头,用于观察管内的环境。

五、综合类
5.1 管道检测+异物抓取
机器人规格型号 SQR-VDR-300/1200
指标参数
变径范围:300-1200mm
爬行距离:400米
过弯能力:≥1.5D
爬坡角度:45°(垂直)
重量:50kg
牵引力:300N
越障能力:20mm
供电方式:AC220V/DC48V
检测精度:1mm
适应行业:市政、工业管道
该项目通过基于300-1200mm管径的管道机器人搭载了6自由度机械臂,同时集成了激光雷达、位姿角度传感器,内置AI智能算法盒子。管道机器人机体搭载了2自由度500万,10倍光学变径的云台,对管内全方位视角进行观看。通过更换连杆实现管径大范围的跨越,当<550mm时,主要用于管内的检测,当>550mm时,搭载机械臂,同时机械臂末端可搭载摄像头和夹爪等工具,对管内异物进行抓取和识别。

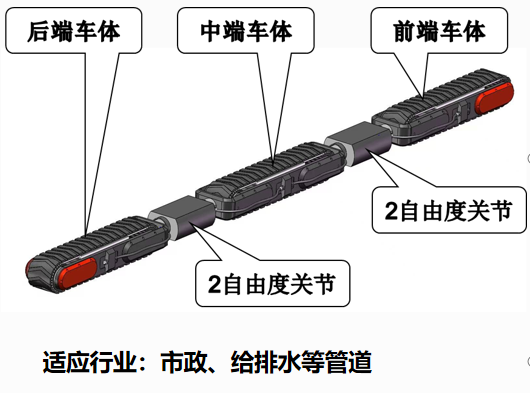
5.2 平台类
该平台主要用于排水管网运维,解决痛点在于机器人通过检查井时,无法直接跨越,此款产品利用串联履带式结构直接跨越检查井,同时该平台上面可以携带多种检测模块和工具,以及可以对机体进行串联和并联使用,当过小管径时串联使用,类似蛇形机器人,当遇到大管径时可以采用并联使用。
视频1
六、售前案例

七、售前仿真视频
1-1仿真视频2
仿真视频2
1-2仿真视频2
【声明:文章图片仅作展示参考。如存在异议,请联系小编,原创整理不易,感谢理解与支持!