矩阵可逆
矩阵可逆
定义:如果一个 n×nn × nn×n的 矩阵AAA是可逆的invertible,那么肯定有一个 n×nn × nn×n的矩阵CCC满足 AC=In=CAAC =I_{n}= CAAC=In=CA 那么矩阵C就是矩阵A的逆形式,记作A−1A^{-1}A−1
1.如果矩阵AAA invertible so linear equation Ax=bAx=bAx=bhas unique solution 也即矩阵A的每一列都是 pivot column
proof: Ax⃗=bA\vec x=bAx =b then have A−1Ax⃗=A−1bA^{-1}A\vec x=A^{-1}bA−1Ax =A−1b then x⃗=A−1b\vec x=A^{-1}bx =A−1b 因为矩阵的可逆形式是唯一的 所以这个解x⃗\vec xx 也是唯一的
二维矩阵
A=(abcd)A=\begin{pmatrix} a&b\\ c&d \end{pmatrix}A=(acbd)
对于二维矩阵的可逆形式,我们可以用1/(ad−bc)∗(d−b−ca)1/(ad-bc)* \begin{pmatrix} d&-b\\-c&a\end{pmatrix} 1/(ad−bc)∗(d−c−ba)表示
proof:假设B=A−1......B=(x1x2x3x4)B=A^{-1} ......B=\begin{pmatrix}x_1&x_2\\x_3&x_4\end{pmatrix}B=A−1......B=(x1x3x2x4)
AB=(ax1+bx3ax2+bx4cx1+dx3cx2+dx4)=In=(1001)AB=\begin{pmatrix}ax_1+bx_3&ax_2+bx_4\\cx_1+dx_3&cx_2+dx_4\end{pmatrix}=I_n=\begin{pmatrix}1&0\\0&1\end{pmatrix}AB=(ax1+bx3cx1+dx3ax2+bx4cx2+dx4)=In=(1001)
那么有ax1+bx3=1,ax2+bx4=0,cx1+dx3=0,cx2+dx4=1ax_1+bx_3=1,ax_2+bx_4=0,cx_1+dx_3=0,cx_2+dx_4=1 ax1+bx3=1,ax2+bx4=0,cx1+dx3=0,cx2+dx4=1式1d-式3 a有(ad−bc)x2=−b(ad-bc)x_2=-b(ad−bc)x2=−b同理我们可以获得x1(ad−cb)=dx_1(ad-cb)=dx1(ad−cb)=d ... x2(ad−bc)=−bx_2(ad-bc)=-bx2(ad−bc)=−b ... x3(bc−ad)=cx_3(bc-ad)=cx3(bc−ad)=c ... x4(bc−ad)=−ax_4(bc-ad)=-ax4(bc−ad)=−a提取(ad-bc)最后得到的矩阵是B=1/(ad−bc)(d−c−ba)B=1/(ad-bc)\begin{pmatrix}d&-c\\-b&a\end{pmatrix}B=1/(ad−bc)(d−b−ca)
多维矩阵
1.初等矩阵是指通过对单位矩阵执行一次初等行变换而得到的矩阵
I=(1001).E1=(0110).E2=(2001).E3=(1401)I=\begin{pmatrix}1&0\\0&1\end{pmatrix}.E_1=\begin{pmatrix}0&1\\1&0\end{pmatrix}.E_2=\begin{pmatrix}2&0\\0&1\end{pmatrix}.E_3=\begin{pmatrix}1&4\\0&1\end{pmatrix}I=(1001).E1=(0110).E2=(2001).E3=(1041)
E2−1=(1/2001)E_2^{-1}=\begin{pmatrix}1/2&0\\0&1\end{pmatrix}E2−1=(1/2001)
这里分别运用了三种初等行变换形成三个初等矩阵
E_1= R_1 R_2interchange ... E2=2R1E_2=2R_1E2=2R1 ... E3=R1+4R2E_3=R_1+4R_2E3=R1+4R2
多维矩阵的逆矩阵
那么通过这个例子我们也可以得到,初等矩阵可以通过一定方式得到单位矩阵。假设我们如果一个 n×nn × nn×n的矩阵InI_nIn经过一系列初等行变化
(你可以拿二维矩阵算一下,发现E2AE_2AE2A得到的就是R1:2R1R_1:2R_1R1:2R1,所以与这种矩阵相乘和直接进行初等行变化的结果一致)
令变化后的矩阵为A
E1E2E3....EkIn=AE_1E_2E_3....E_kI_n=AE1E2E3....EkIn=A
因为我们知道E1E1−1=InE_1E_1^{-1}=I_nE1E1−1=In 所以对A进行一系列变化
E1−1E2−1...Ek−1A=E1−1E2−1...Ek−1E1E2E3....EkIn=I1I2...IkIn=InE_1^{-1}E_2^{-1}...E_k^{-1}A=E_1^{-1}E_2^{-1}...E_k^{-1}E_1E_2E_3....E_kI_n=I_1I_2...I_kI_n=I_nE1−1E2−1...Ek−1A=E1−1E2−1...Ek−1E1E2E3....EkIn=I1I2...IkIn=In
所以我们就可以获得矩阵A的逆矩阵A−1=E1−1E2−1...Ek−1AA^{-1}=E_1^{-1}E_2^{-1}...E_k^{-1}AA−1=E1−1E2−1...Ek−1A
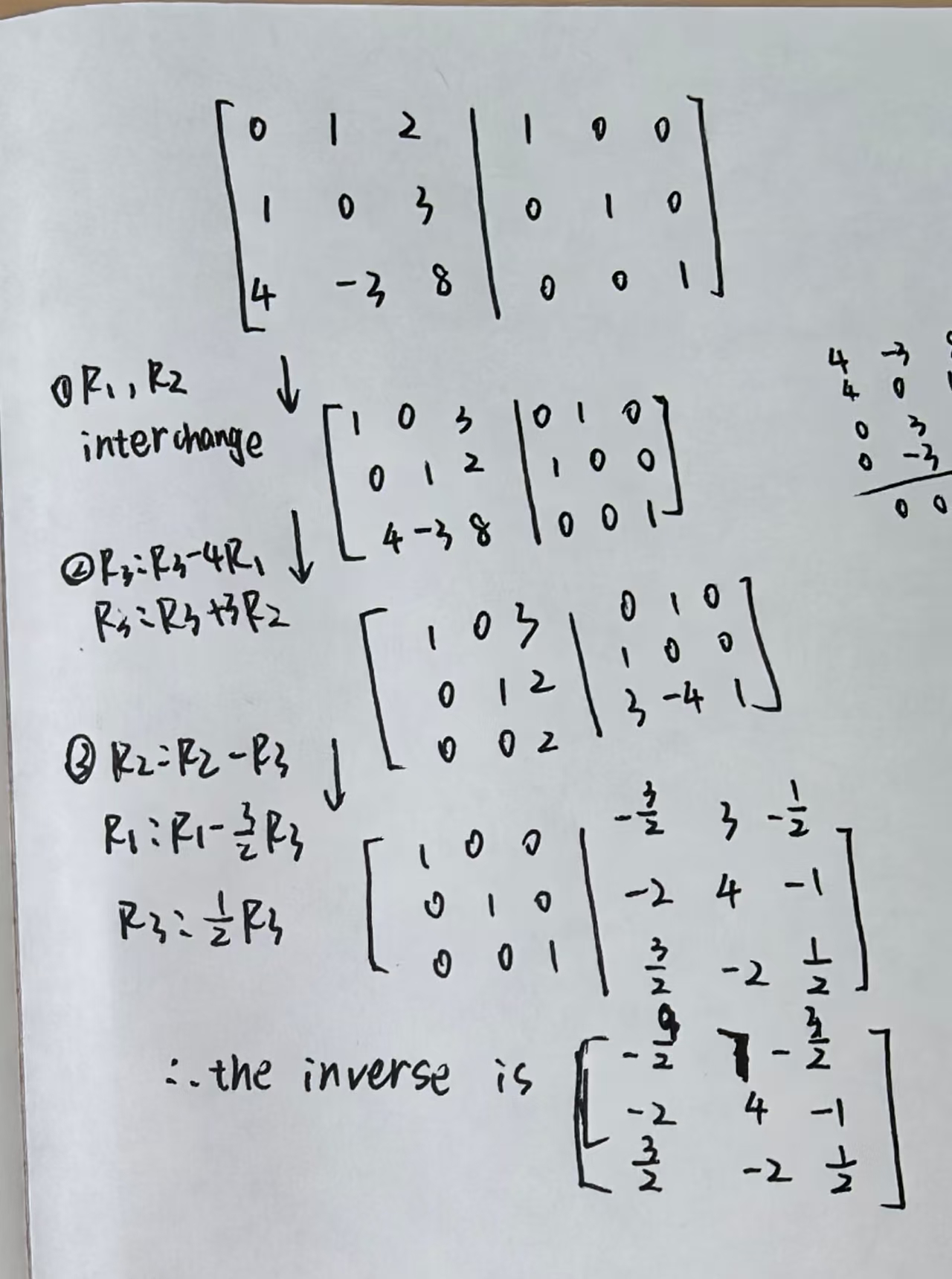
这就是多维矩阵逆矩阵的求法,后续计算过程中我们就可以直接借助A和I同时运算得到A−1A^{-1}A−1
1.
定义有:行约简增广矩阵A∣IA \|IA∣I。若A行等价于I,则A∣IA\| IA∣I行等价于I∣A−1I \|A\^{−1}I∣A−1。否则,A不可逆。
2.
矩阵AAA可逆,当且仅当他和单位矩阵InI_nIn是行等价时
例题