前言
本示例展示了铰链基于灵敏度的拓扑优化的基本工作流程。
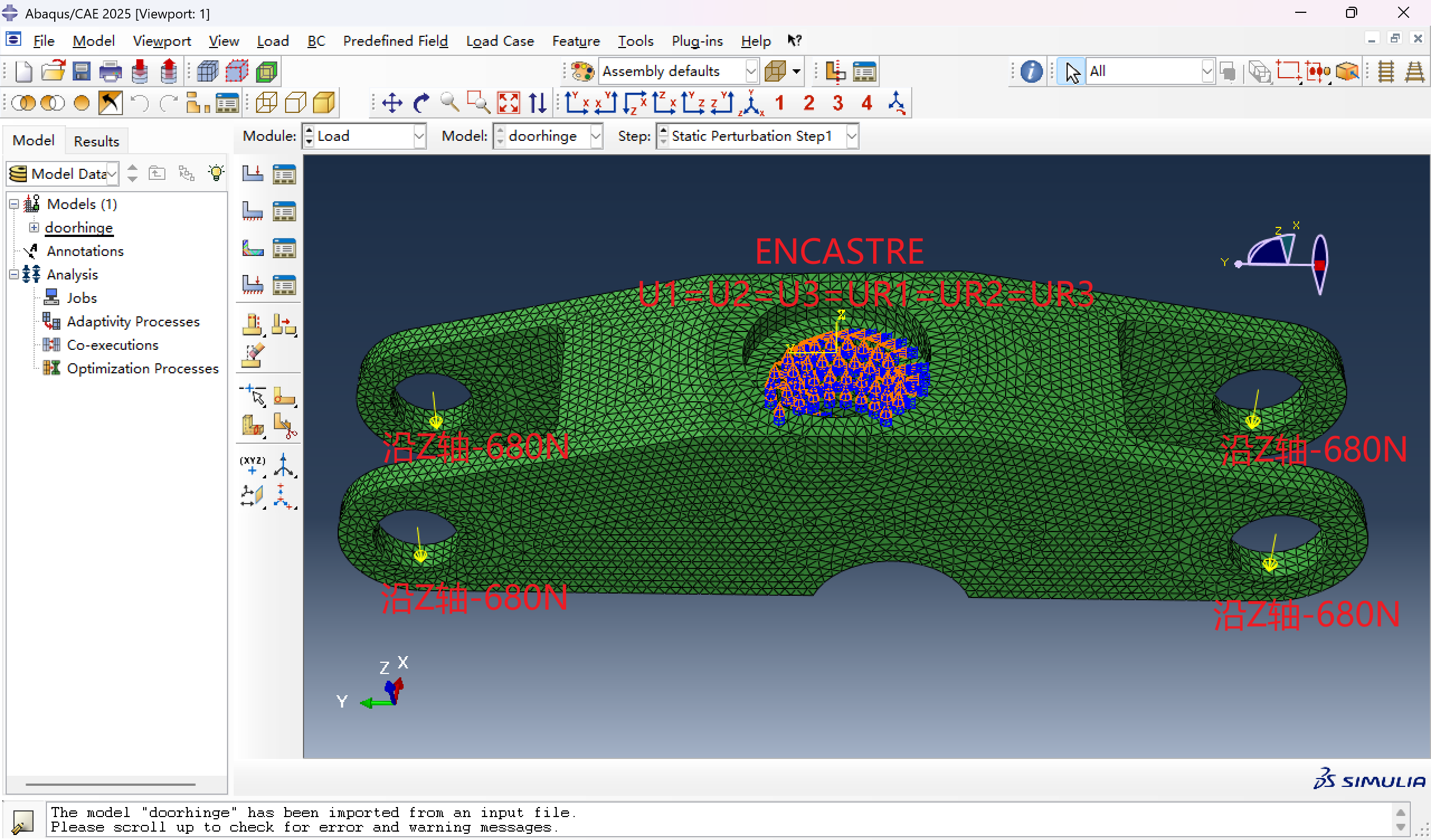
该示例模型是鸥翼式汽车车门开启机构的一部分,如下图所示。模型中心孔为全固定约束,载荷施加在四个外侧轴承孔上。优化目标为:在将整体质量降低至约 32.5% 的同时,最大化结构刚度。
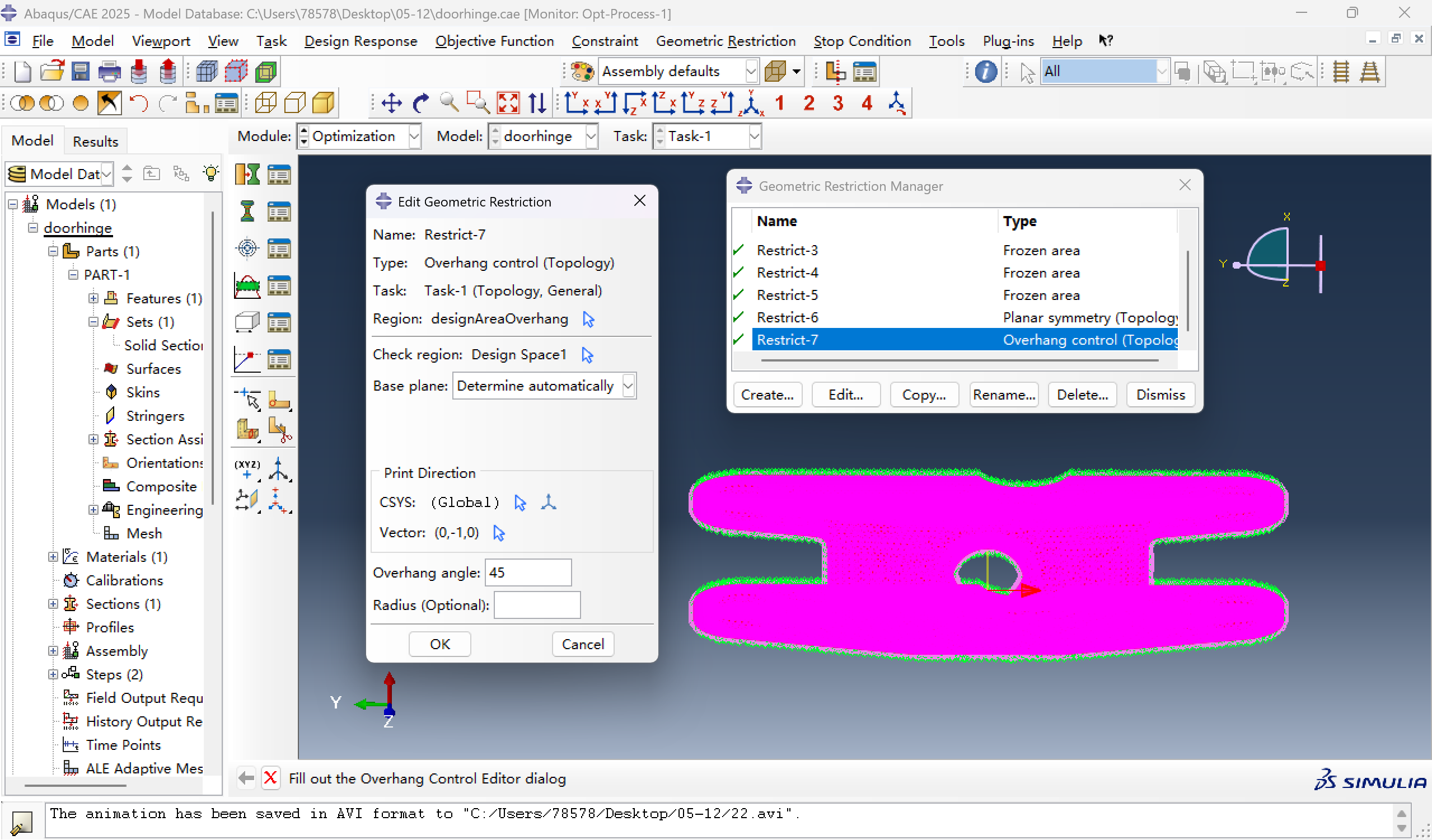
由于模型需采用增材制造工艺生产,设置中包含悬垂约束,限制所选打印方向上的悬垂结构角度不超过约 45°。此外,优化还包含平面对称约束以及五个冻结区域。
本页讨论
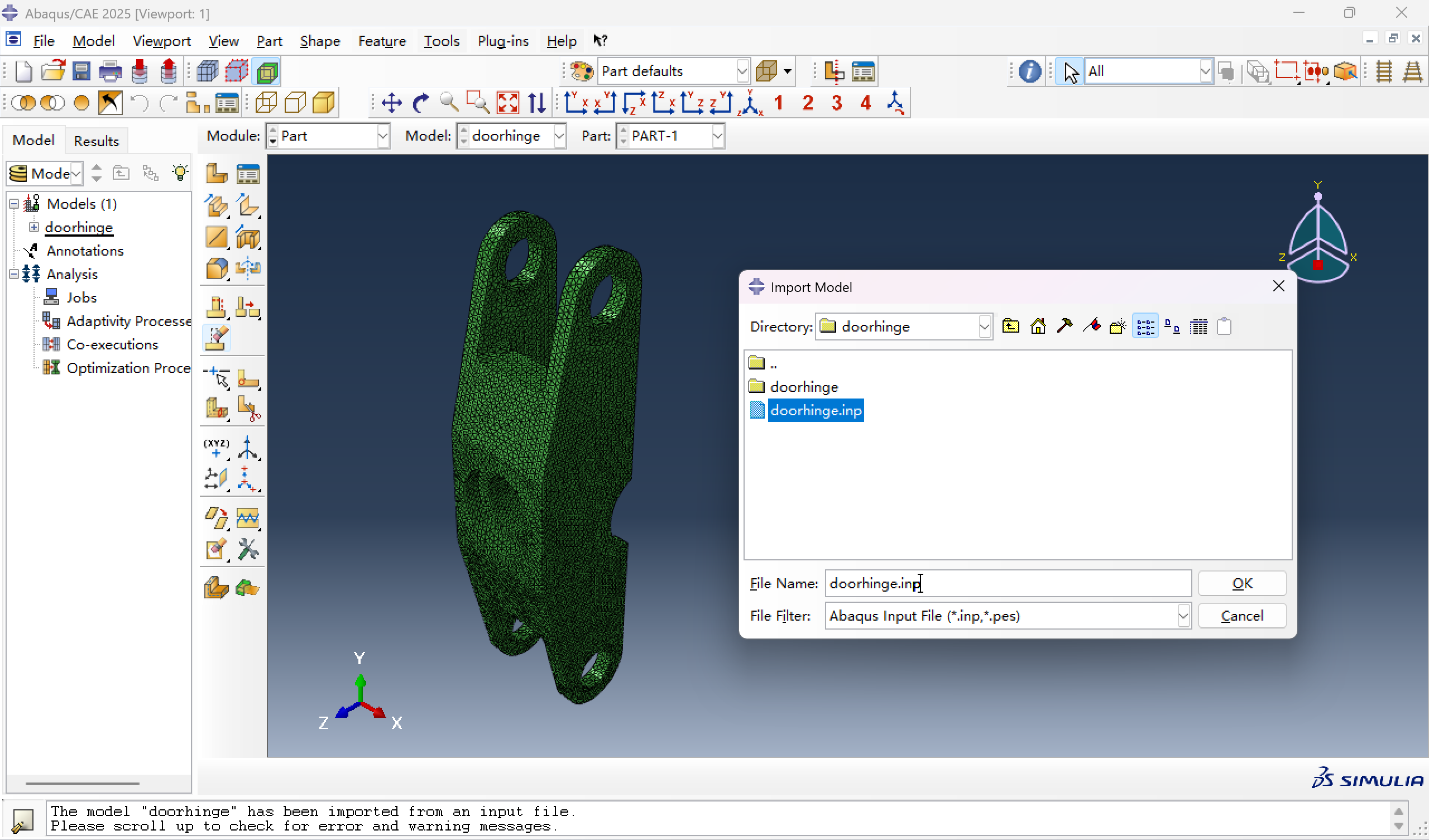
一、导入doorhinge.inp文件
二、设置优化
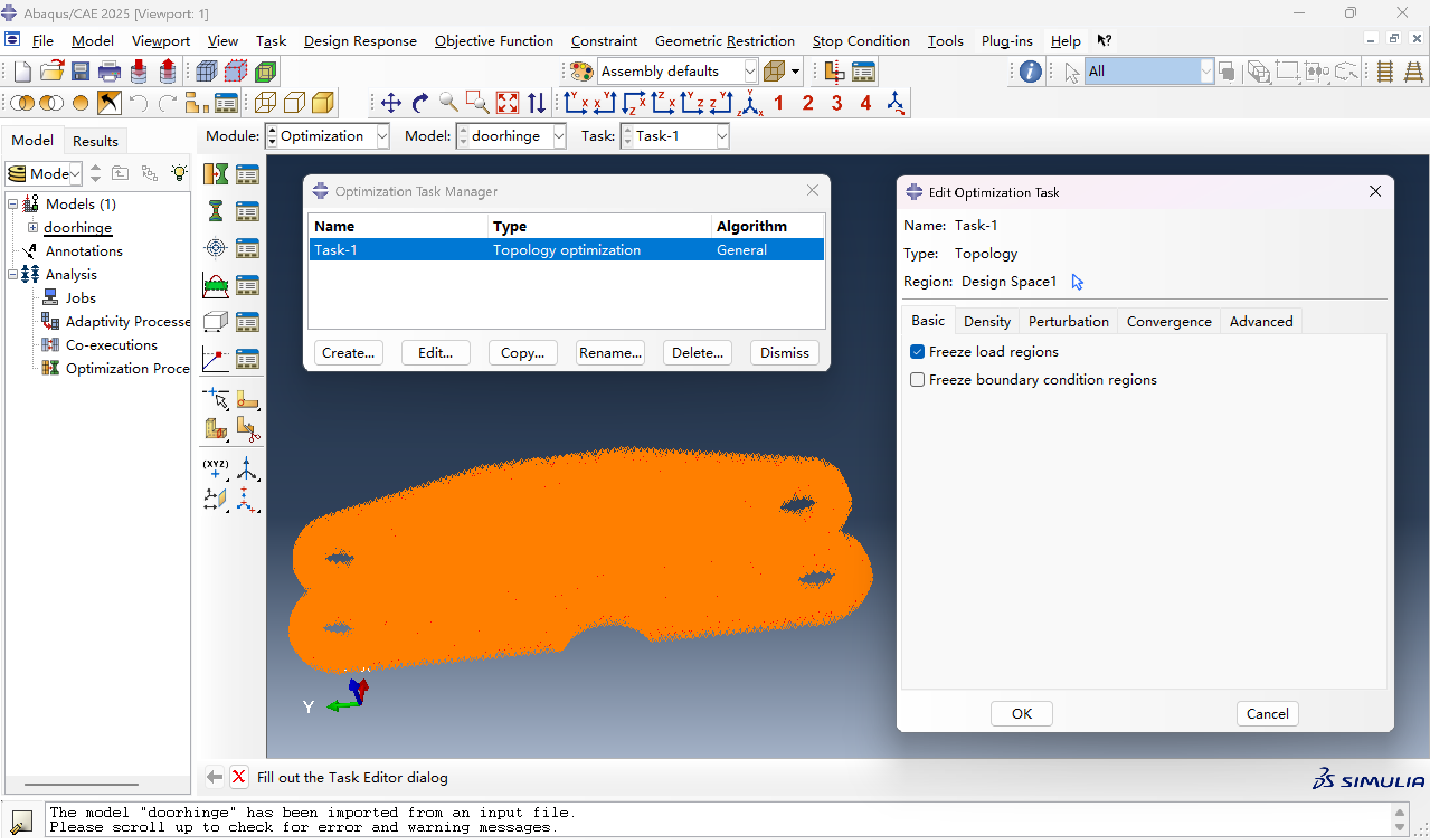
1.创建优化任务
在OPTIMIZATION模块,创建基于灵敏度的拓扑优化任务Task-1。
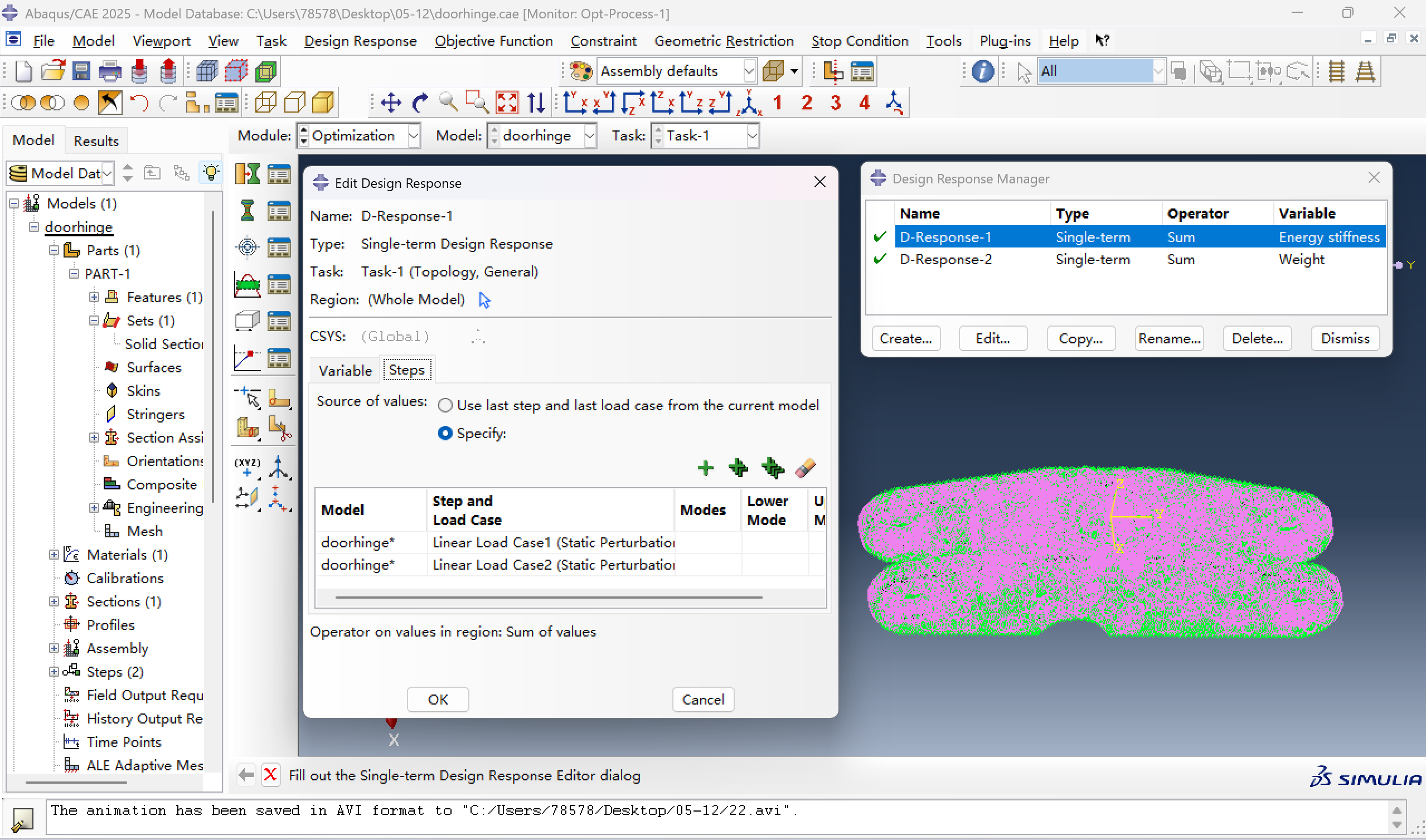
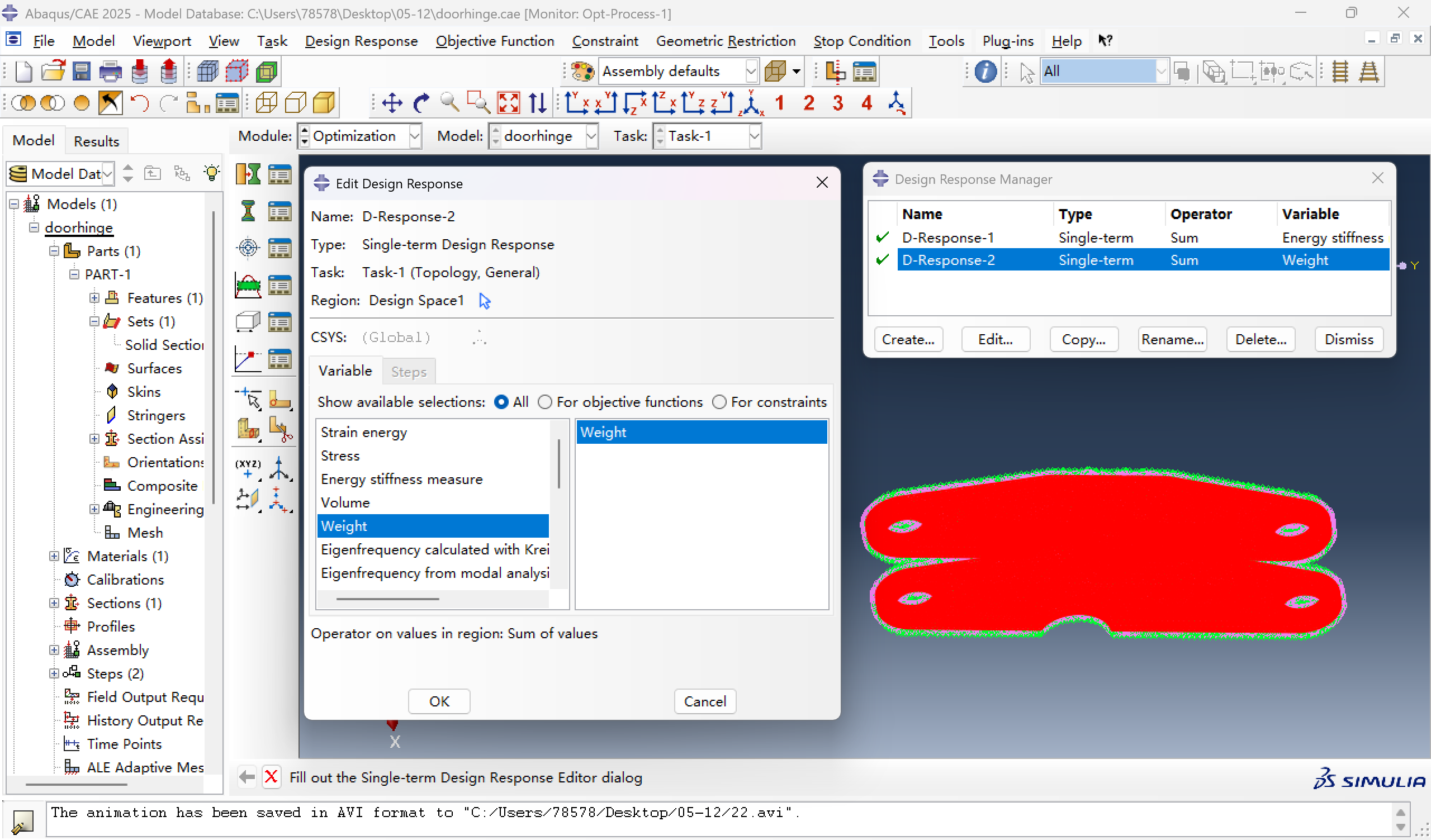
2、创建设计响应
- 定义基于能量的刚度度量:设计区域中所有单元所有分析步的能量刚度度量总和D-Response-1。
- 定义结构重量的设计响应:设计区域中所有单元的重量总和D-Response-2。
3、创建目标函数
最小化模型的能量刚度度量:设计区域中所有单元所有分析步的能量刚度度量总和D-Response-1。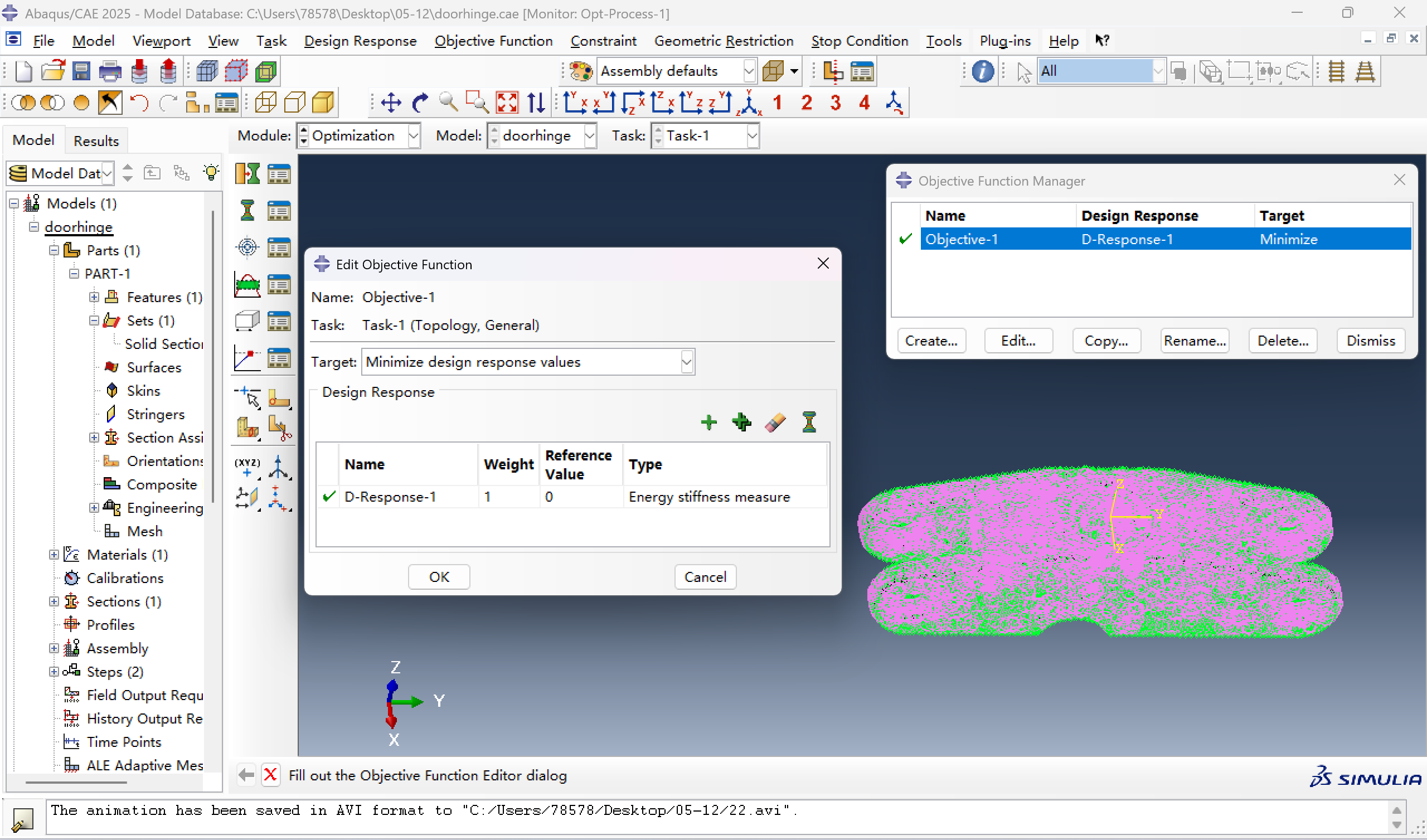
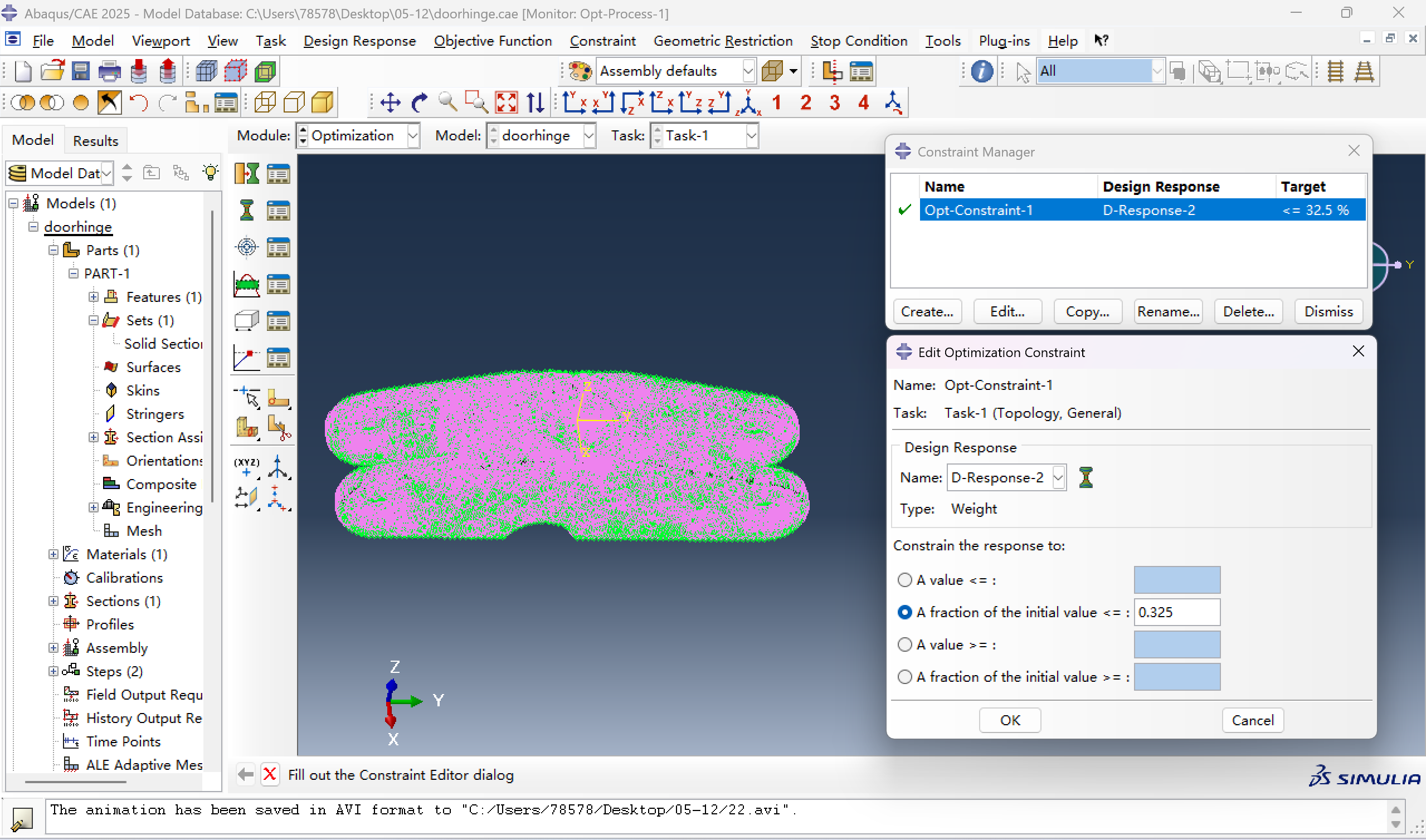
4、创建约束
限制优化后模型重量应包含原始模型体积的32.5%。
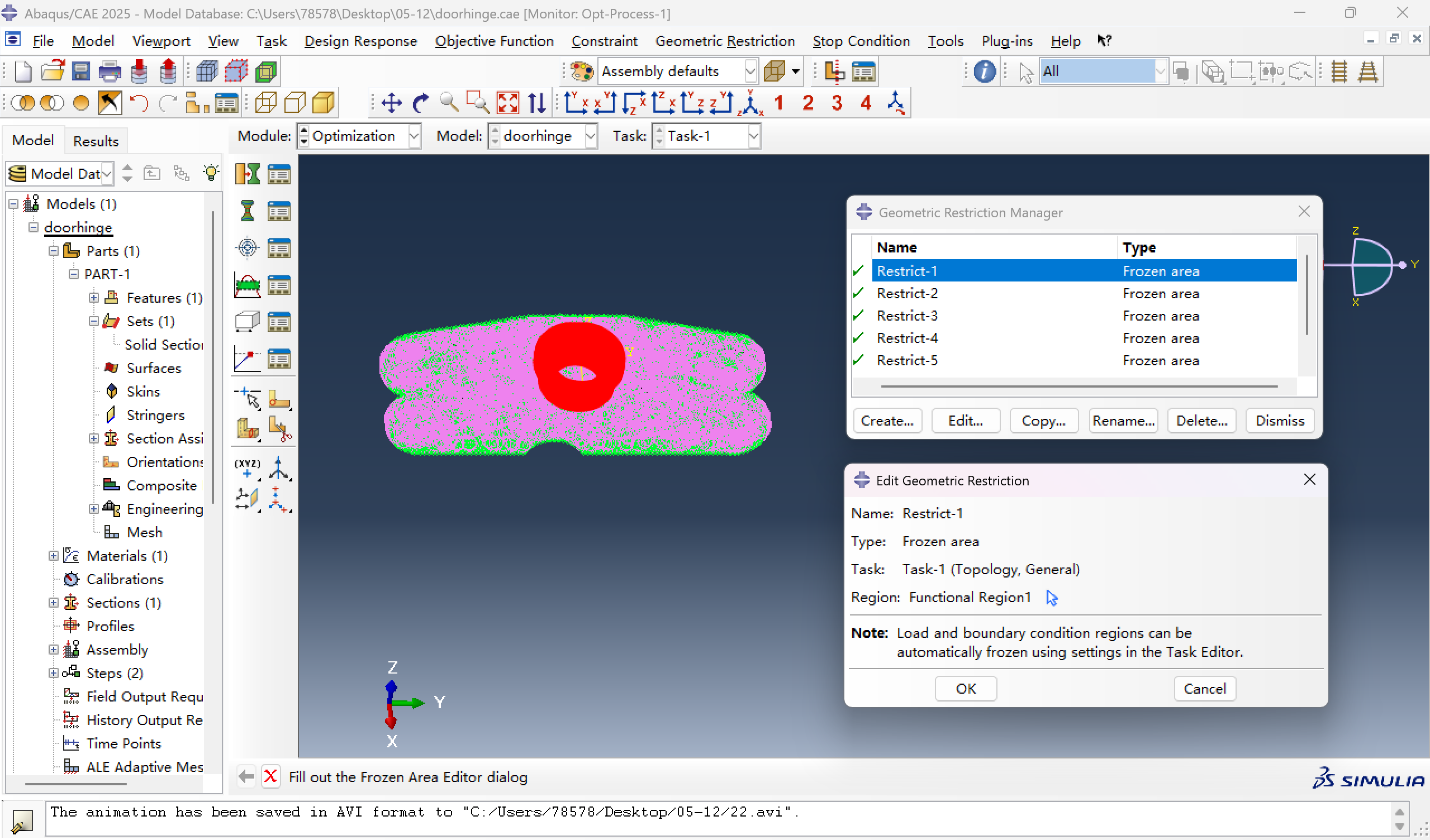
5、创建几何约束
分别设置受力和约束的5个圆孔Functional Region1~Functional Region5为冻结区域。
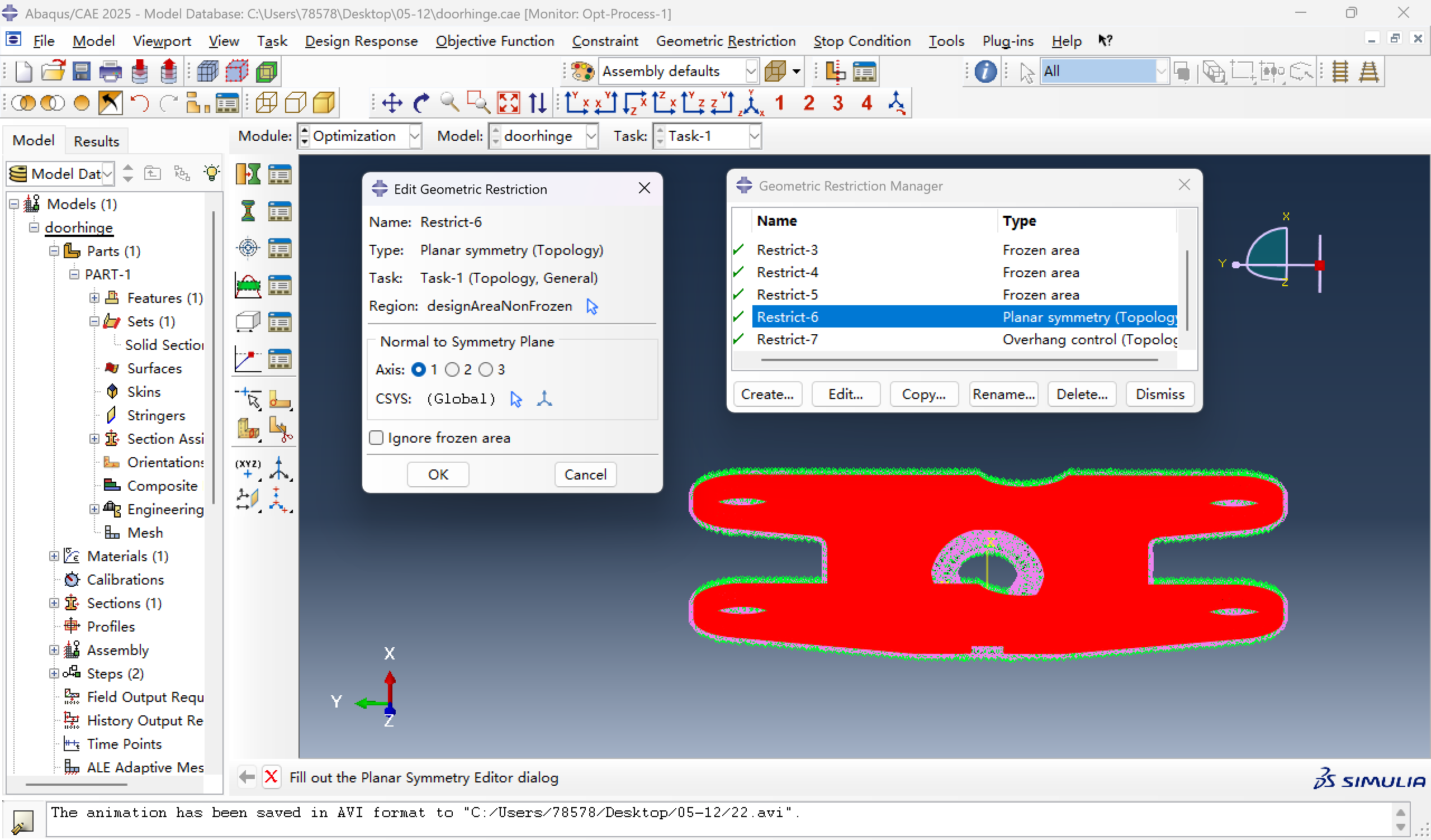
创建平面对称约束Restrict-6:坐标系选择默认,轴选择1。
定义悬空限制约束:向量选择0,-1,0,基准平面自动生成,悬垂角度45。
6、创建并提交优化进程
在JOB模块,创建优化进程Opt-Process-1。
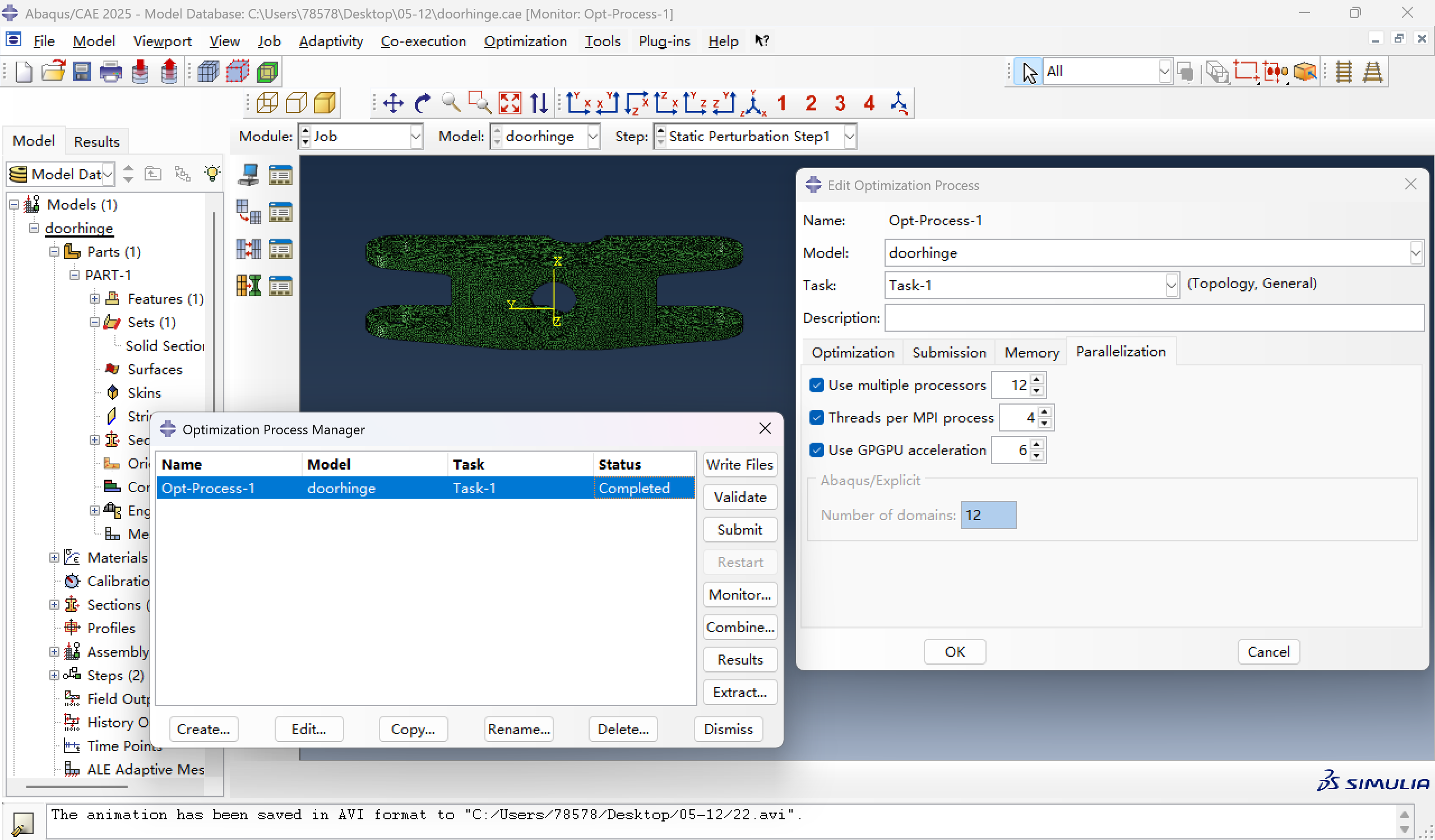
7、优化结果