前言
本例演示如何设计一个带加强筋的注塑零件。
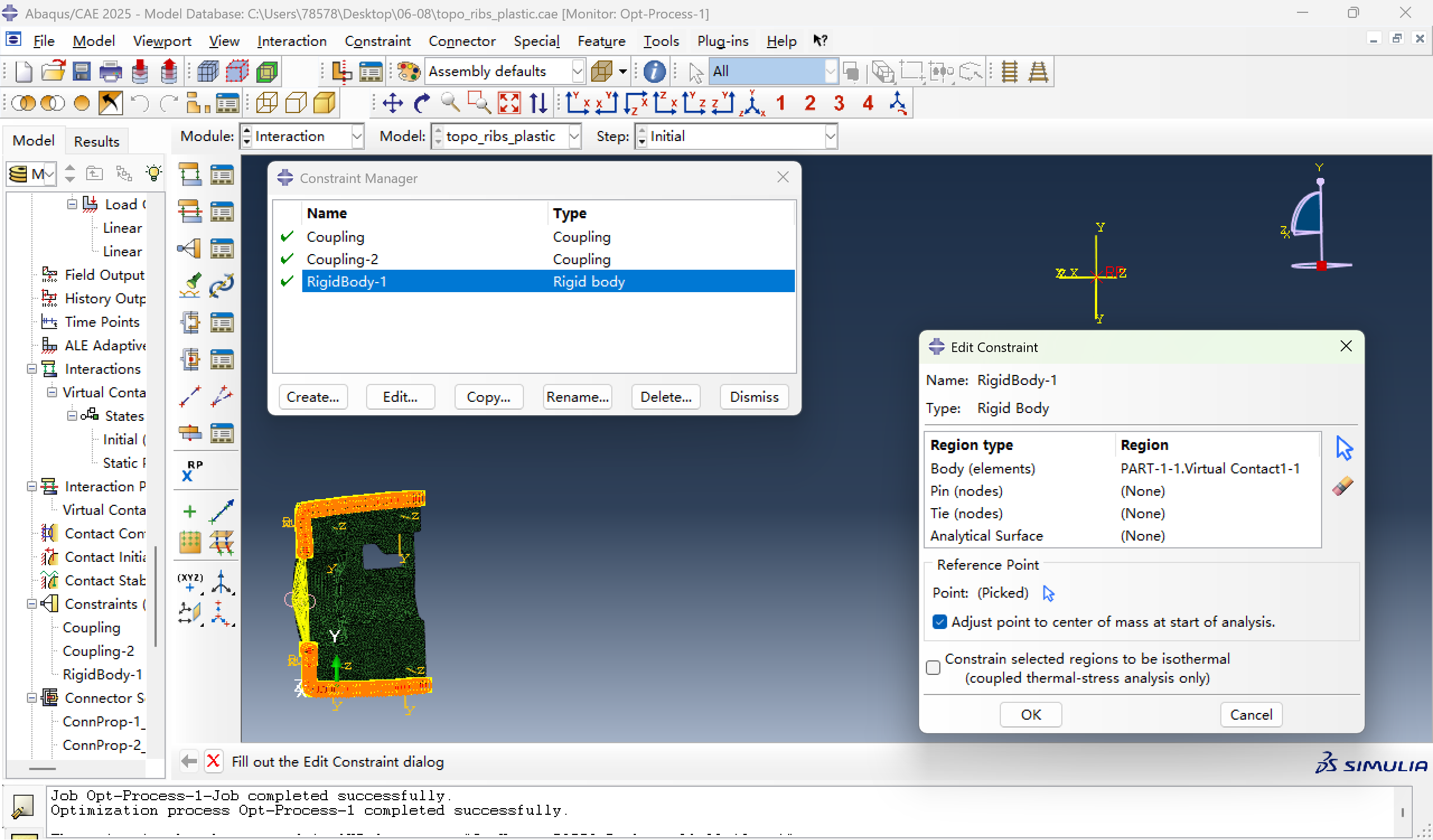
约束:两个耦合约束,用于施加载荷,一个刚体约束,用于施加固定约束。
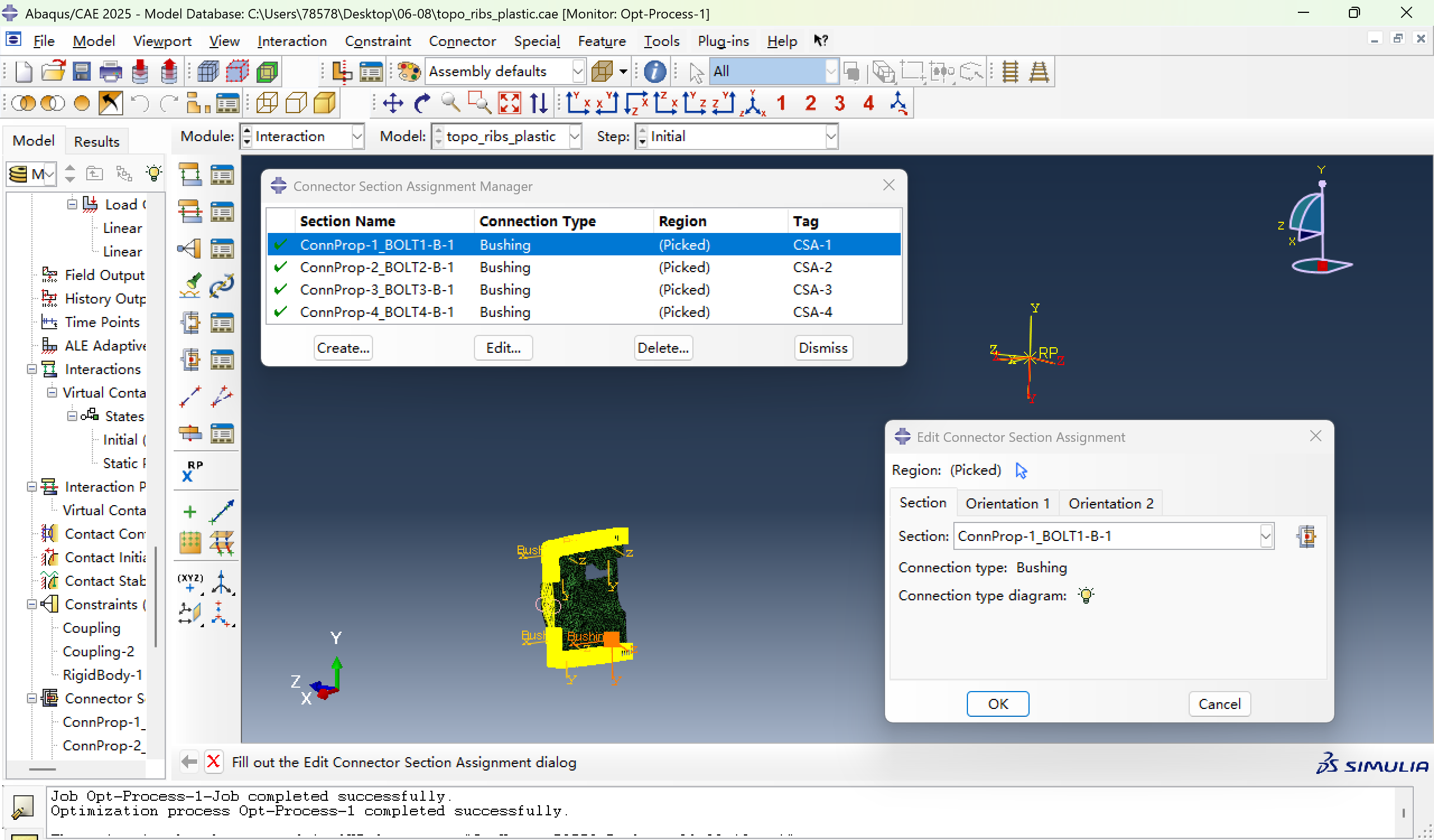
在螺钉孔处施加衬套约束:
本页讨论
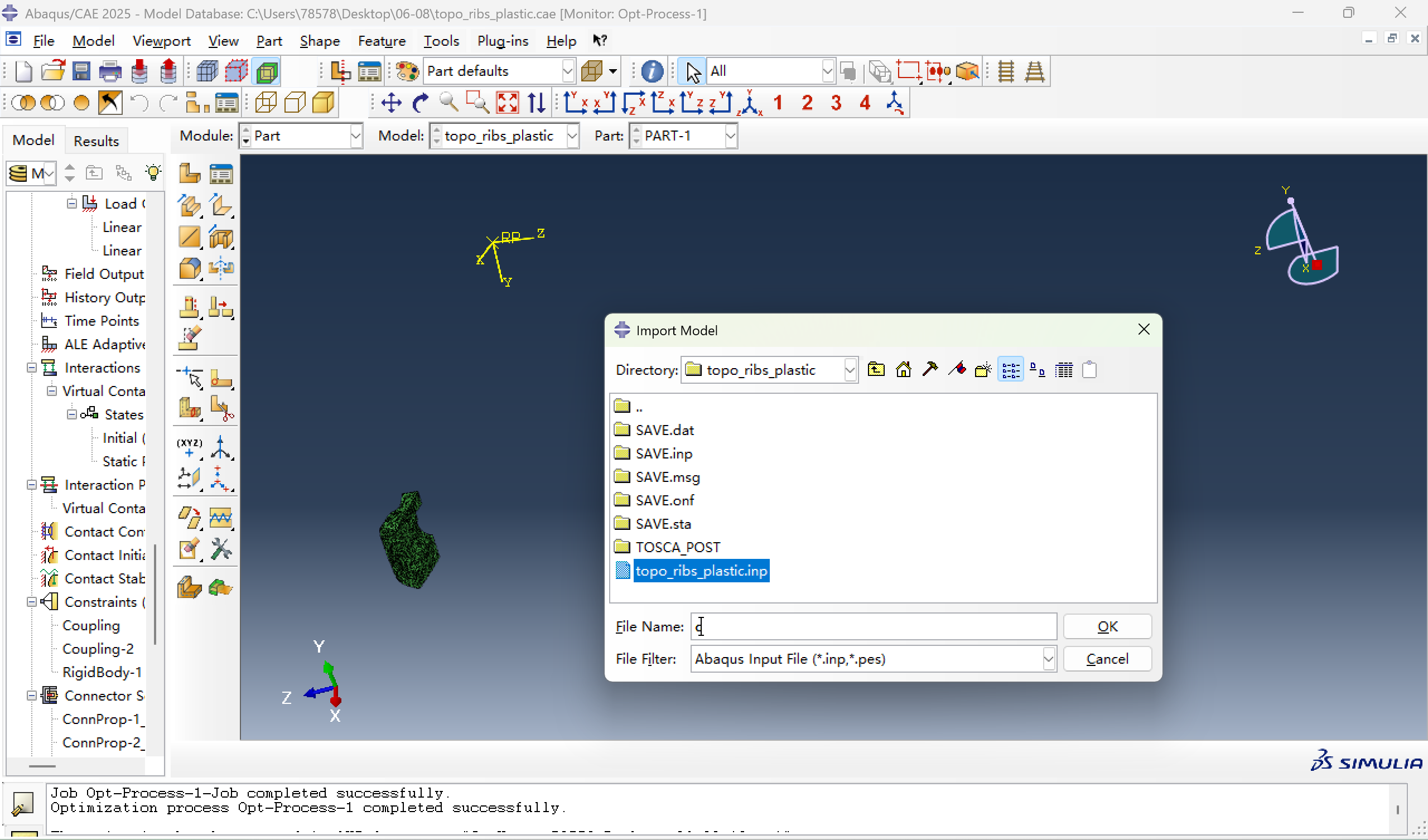
一、导入topo_ribs_plastic.inp文件
二、设置优化
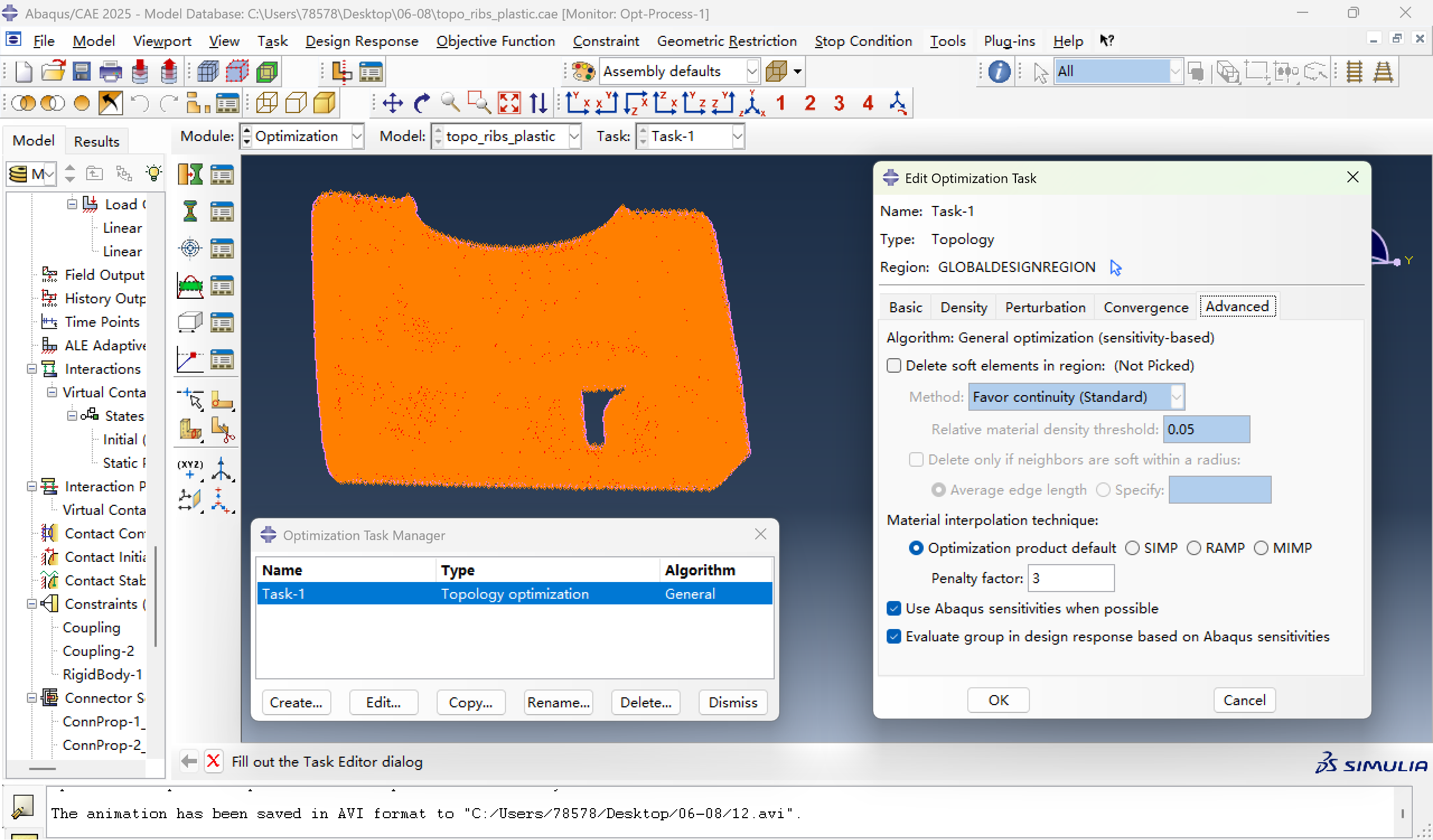
1.创建优化任务
在OPTIMIZATION模块,创建基于灵敏度的拓扑优化任务Task-1。
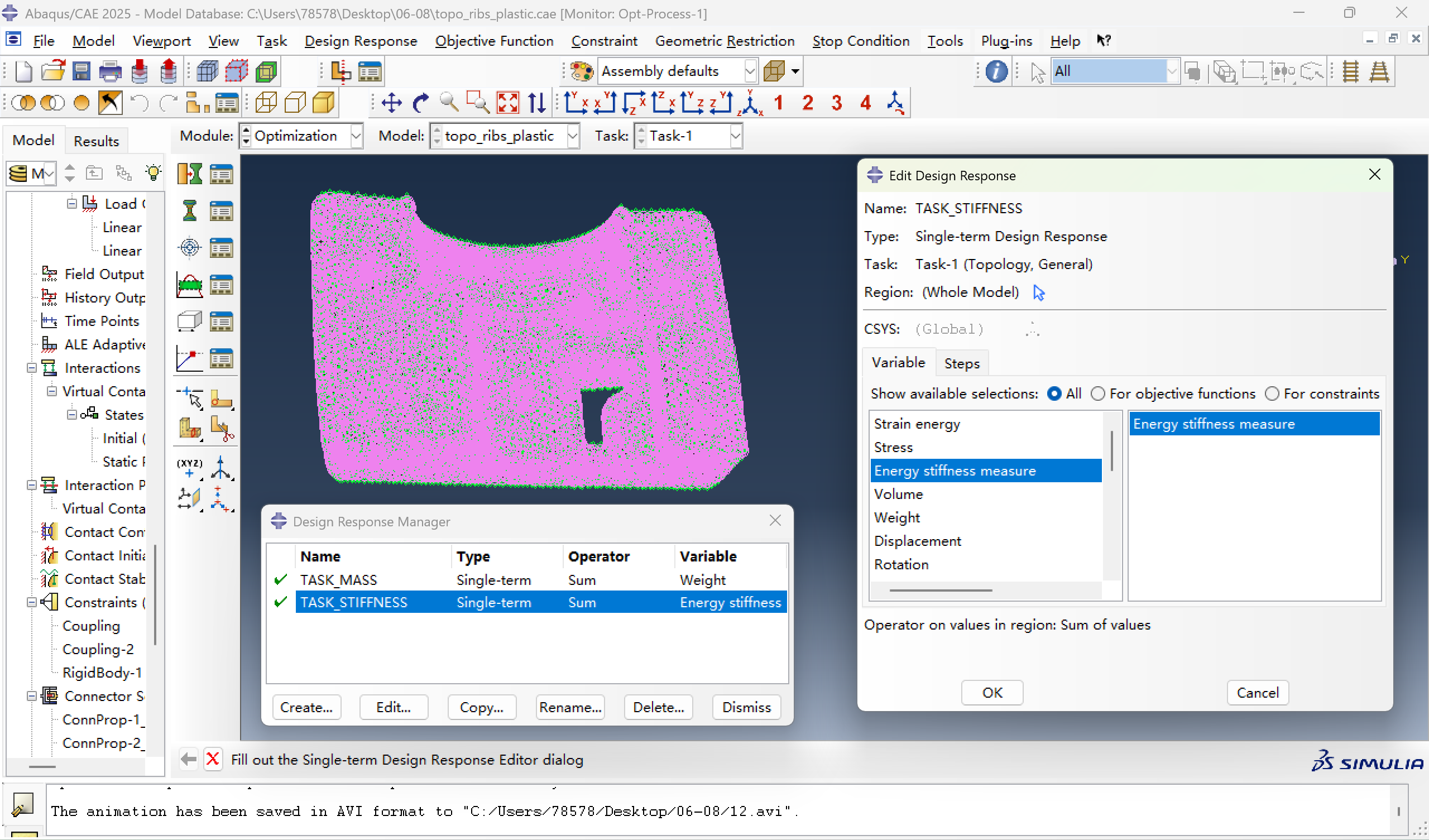
2、创建设计响应
- 定义基于能量的刚度指标的设计响应TASK_STIFFNESS:两种载荷工况下设计区域中所有单元的能量刚度指标总和。
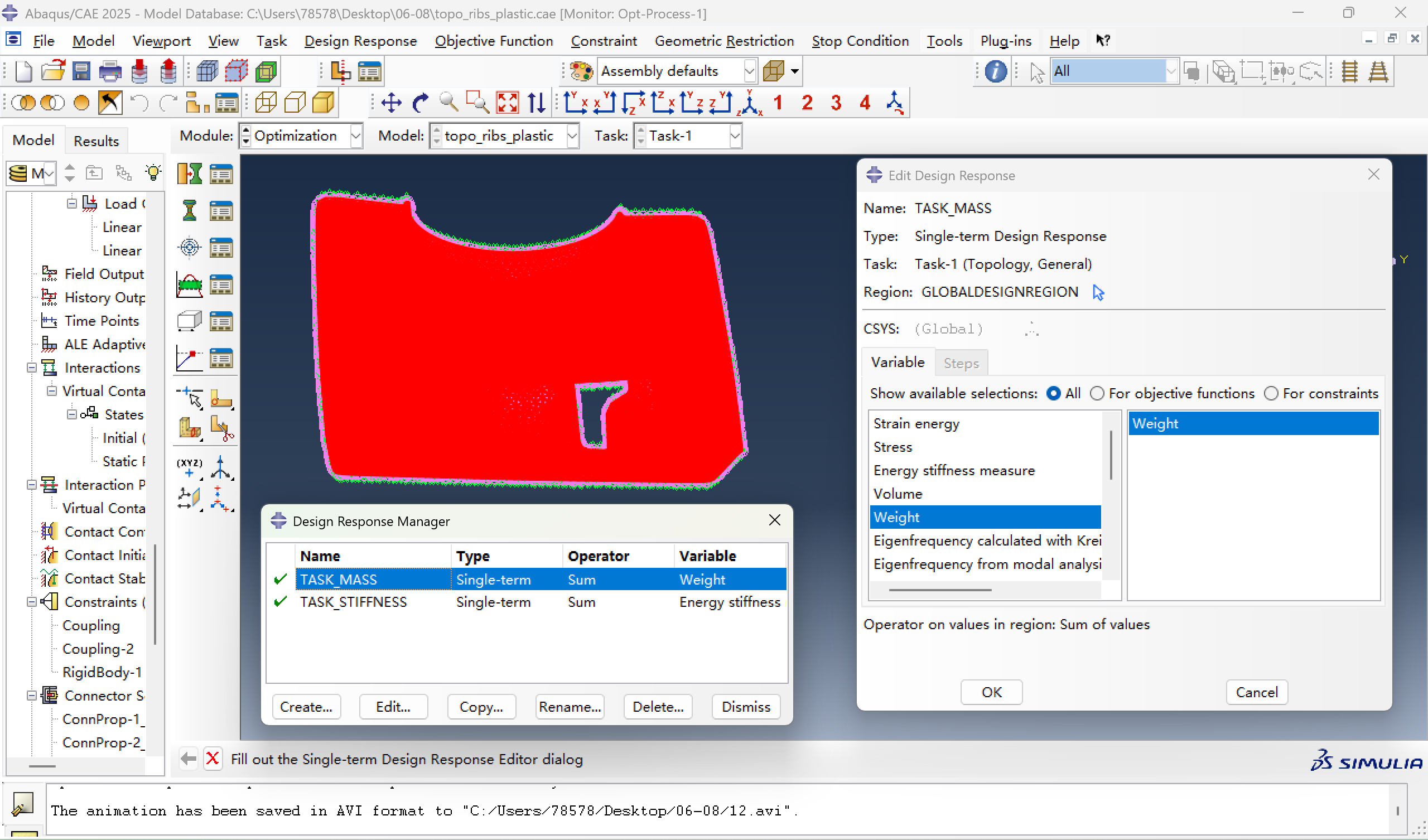
- 定义重量的设计响应TASK_MASS:设计区域中所有单元的重量总和。
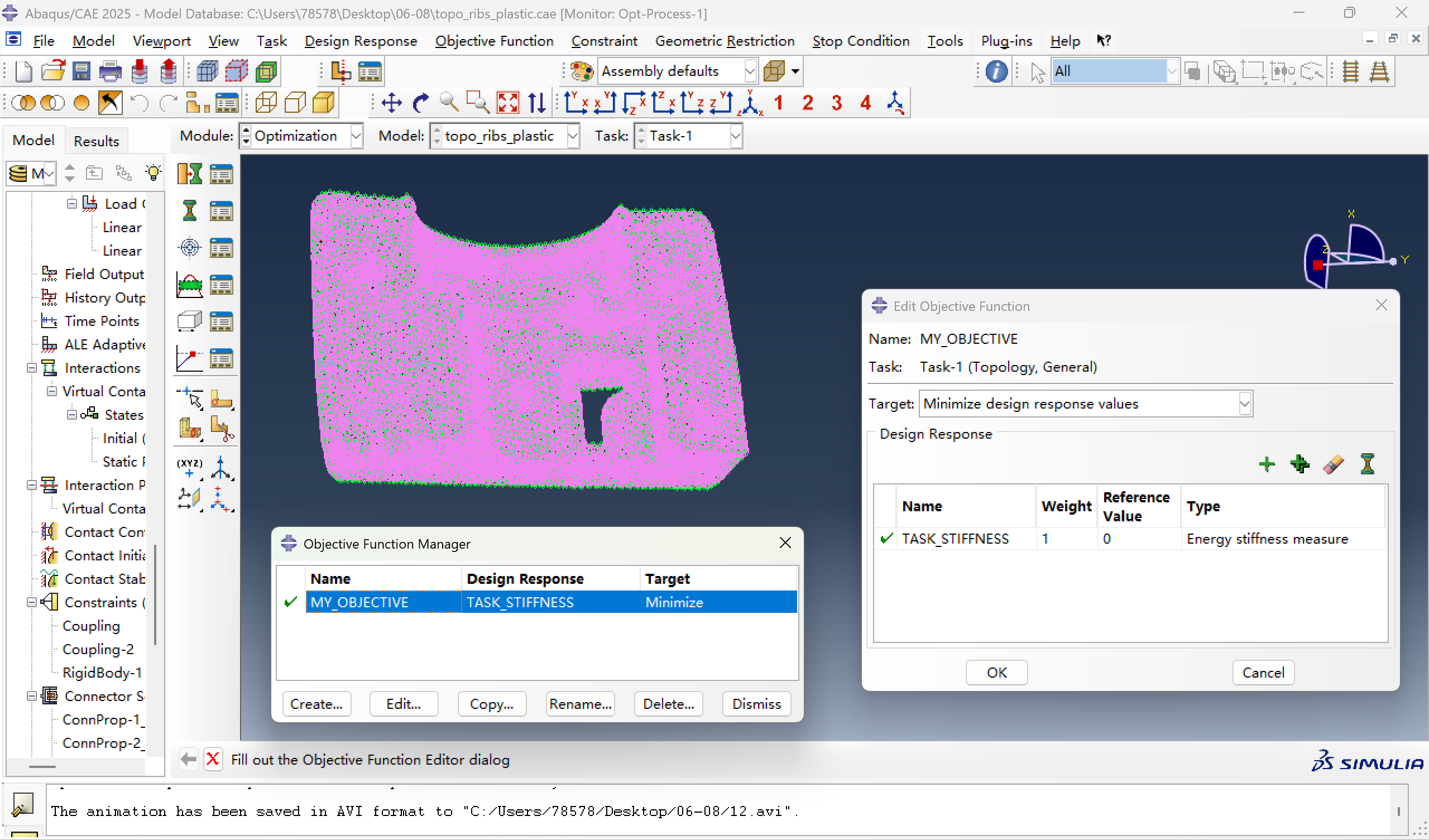
3、创建目标函数
- 最小化基于能量的刚度指标的设计响应TASK_STIFFNESS。
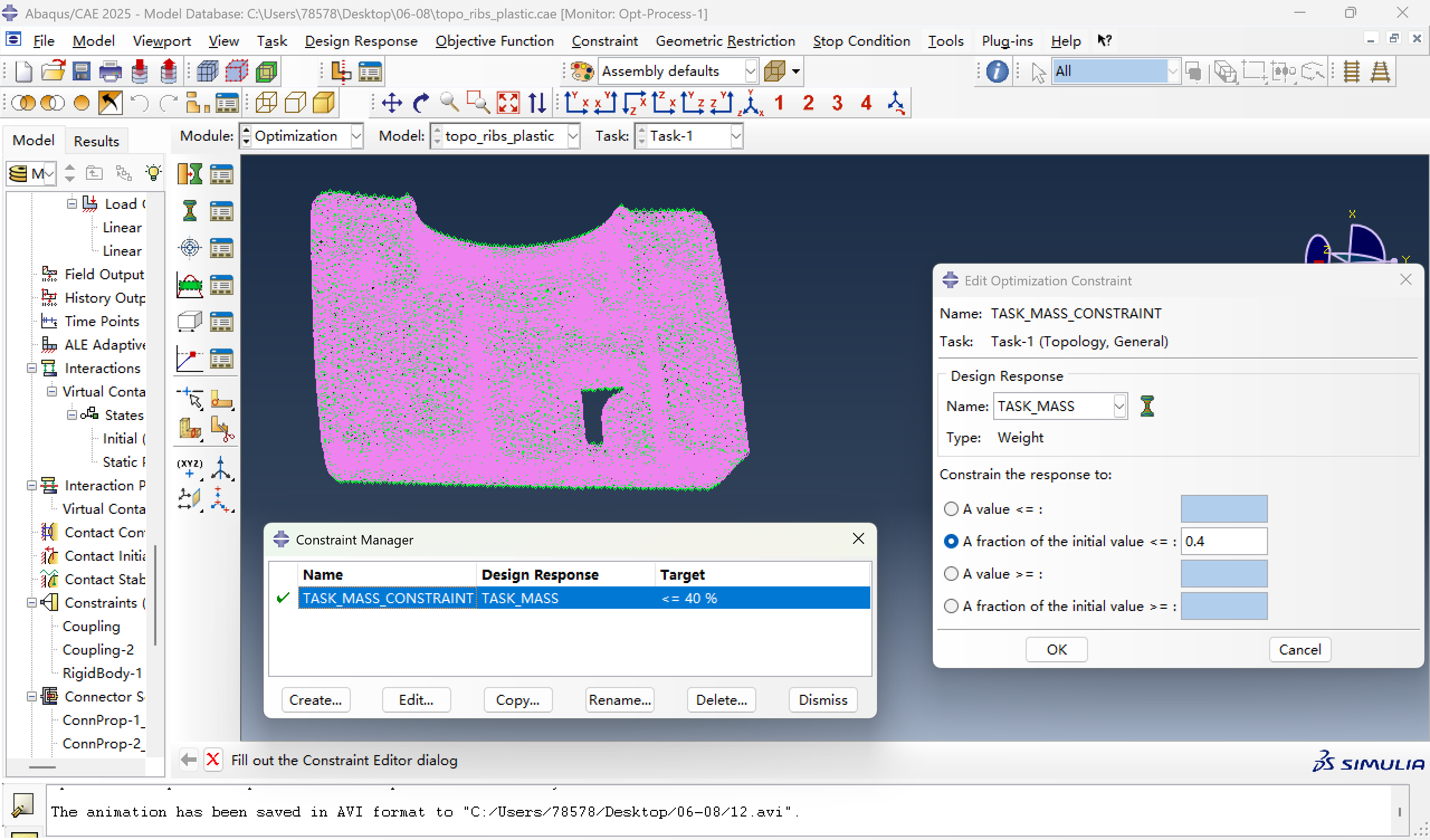
4、创建约束
- 限制优化后重量的设计响应TASK_MASS≤40%初始模型重量。
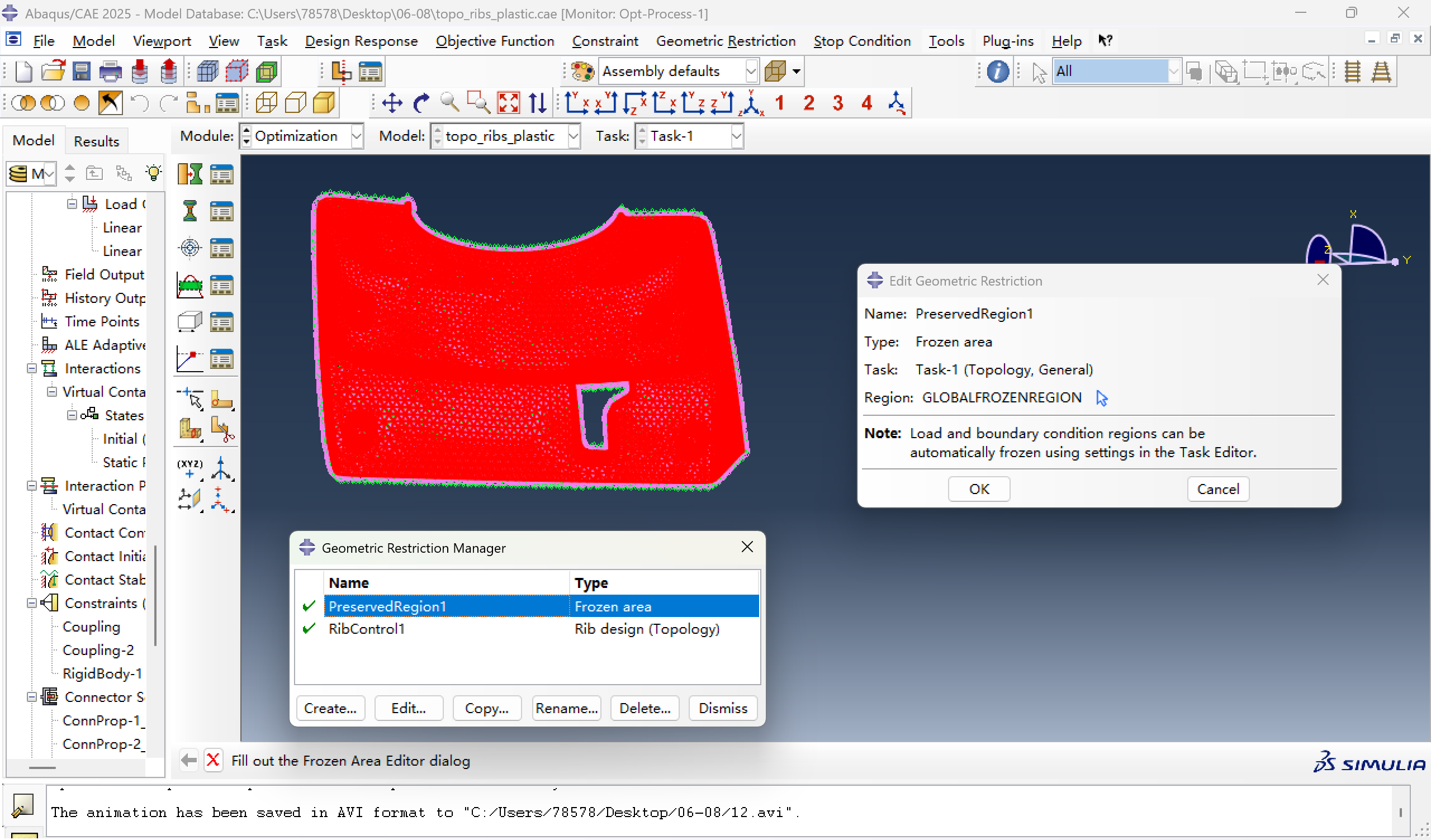
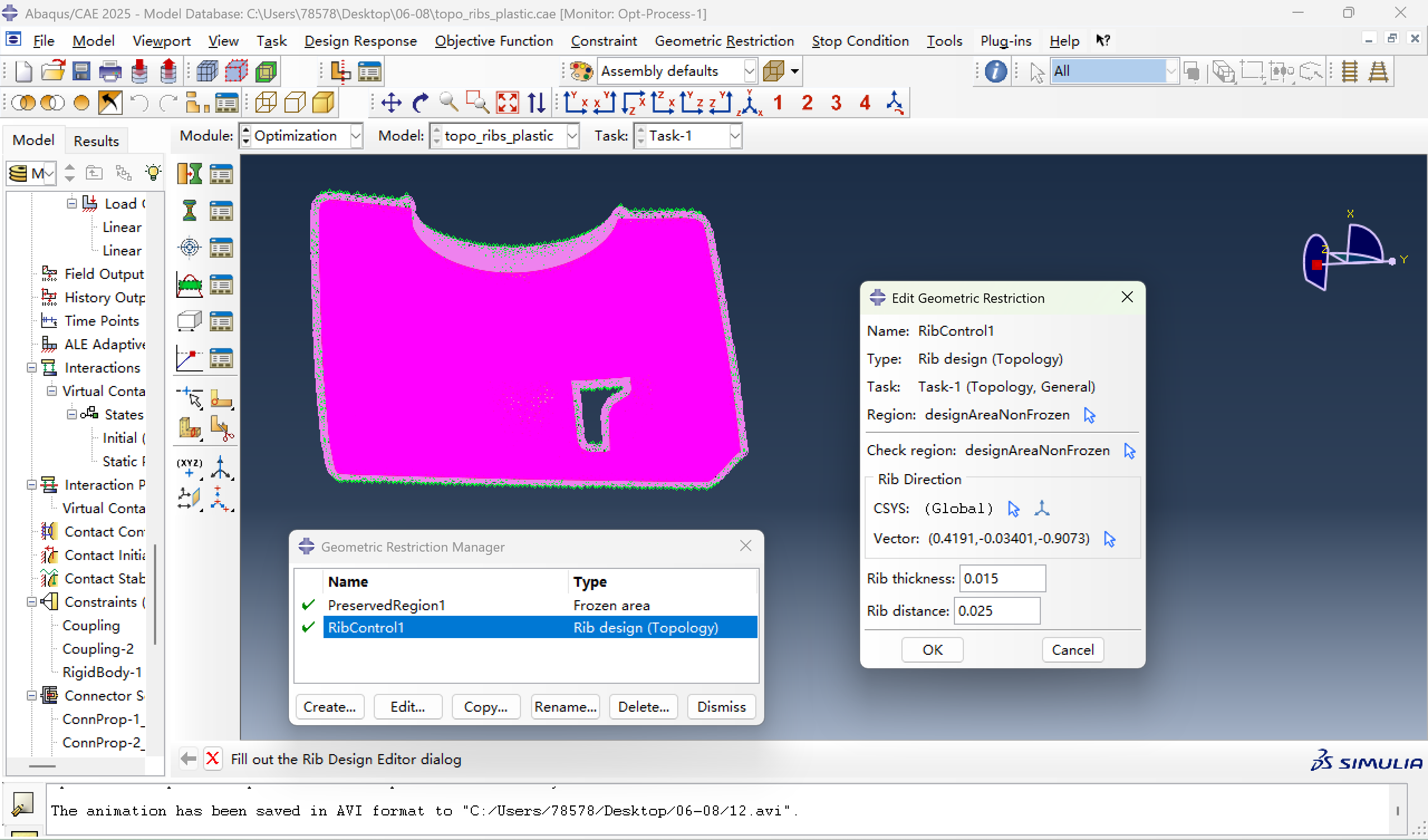
5、几何约束
- 限制GLOBALFROZENREGION为冻结区域;
- 限制加强筋厚度0.015,间距0.025,向量为0.4191, -0.03401, -0.9073。
6、创建并提交优化进程
在JOB模块,创建优化进程Opt-Process-1。
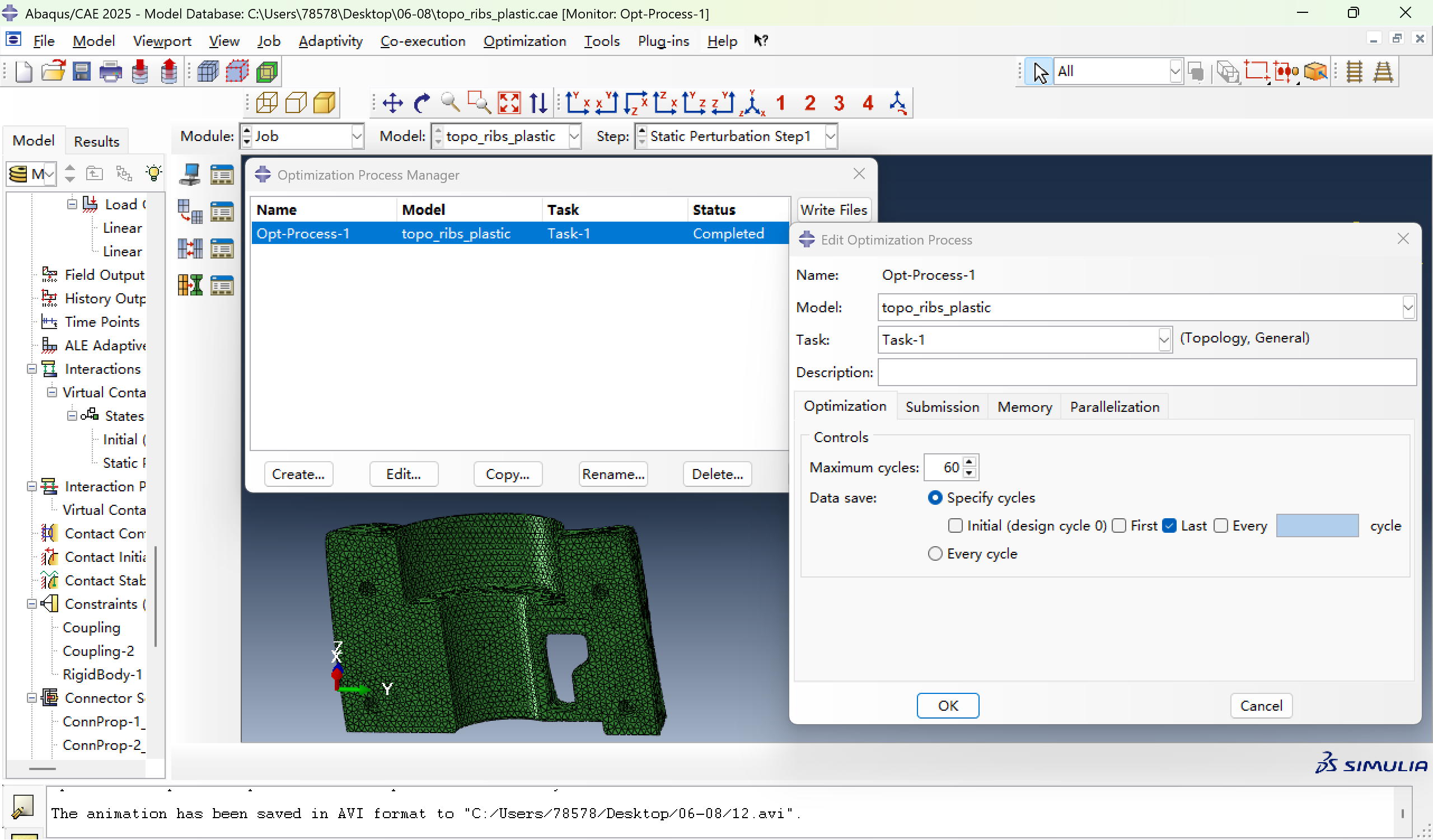
7、优化结果