WSL 系统下免费使用 SpireCV-Pro 教程
本教程将带你从零开始,在 Windows 的 WSL2 环境中搭建 SpireCV-Pro 智能感知平台,并运行一个 YOLO11 目标检测可视化示例。
1. 安装 WSL2 + Ubuntu 22.04
1.1 启用 WSL
以管理员身份打开 PowerShell,执行:
powershell
wsl --install该命令会自动启用 WSL2 并安装默认的 Ubuntu 发行版。安装完成后重启电脑。
如果已安装过旧版 WSL,先升级到 WSL2:
powershellwsl --update wsl --set-default-version 2
1.2 安装 Ubuntu 22.04
如果上一步没有自动安装 Ubuntu 22.04,手动安装:
powershell
wsl --install -d Ubuntu-22.04安装过程中会提示创建用户名和密码(牢记此密码,后续 sudo 需要)。
1.3 进入 WSL
在 PowerShell 中输入:
powershell
wsl即可进入 Ubuntu 22.04 终端。后续所有操作都在此终端中进行。
2. 安装 WSL 版 CUDA
WSL2 支持直接使用 Windows 宿主机的 NVIDIA 驱动,无需在 WSL 内安装显卡驱动。
2.1 确认 Windows 端已安装 NVIDIA 驱动
在 Windows 的 PowerShell 中执行:
powershell
nvidia-smi如果显示 GPU 信息,说明驱动已就绪。如果没有,请从 NVIDIA 官网 下载安装。
2.2 在 WSL 内安装 CUDA Toolkit
回到 WSL 终端,执行以下命令安装 CUDA 12.6(WSL 专用版本):
bash
wget https://developer.download.nvidia.com/compute/cuda/repos/wsl-ubuntu/x86_64/cuda-wsl-ubuntu.pin
sudo mv cuda-wsl-ubuntu.pin /etc/apt/preferences.d/cuda-repository-pin-600
wget https://developer.download.nvidia.com/compute/cuda/12.8.2/local_installers/cuda-repo-wsl-ubuntu-12-8-local_12.8.2-1_amd64.deb
sudo dpkg -i cuda-repo-wsl-ubuntu-12-8-local_12.8.2-1_amd64.deb
sudo cp /var/cuda-repo-wsl-ubuntu-12-8-local/cuda-*-keyring.gpg /usr/share/keyrings/
sudo apt-get update
sudo apt-get -y install cuda-toolkit-12-82.3 配置环境变量
bash
echo 'export PATH=/usr/local/cuda-12.8/bin:$PATH' >> ~/.bashrc
echo 'export LD_LIBRARY_PATH=/usr/local/cuda-12.8/lib64:$LD_LIBRARY_PATH' >> ~/.bashrc
source ~/.bashrc验证安装:
bash
nvcc --version3. 安装 Python 3.10
Ubuntu 22.04 默认 Python 版本为 3.10,确认版本:
bash
python3 --version如果未安装或版本不对:
bash
sudo apt update
sudo apt install -y python3.10 python3.10-venv python3.10-dev python3-pip建议创建虚拟环境:
bash
python3.10 -m venv ~/spirecv_env
source ~/spirecv_env/bin/activate4. 安装 PyTorch(CUDA 版)
bash
pip install torch torchvision --index-url https://download.pytorch.org/whl/cu128
# 如果速度慢,可以添加镜像源
# -i https://repo.huaweicloud.com/repository/pypi/simple验证 PyTorch 能否使用 CUDA:
bash
python3 -c "import torch; print('CUDA available:', torch.cuda.is_available())"输出 CUDA available: True 即表示成功。
5. 安装 SpireMS
SpireMS 是 SpireCV-Pro 的通信框架,需要先安装。
bash
sudo apt update
sudo apt install -y build-essential cmake git python3-pip libcurl4-openssl-dev libeigen3-dev libssl-dev libncurses-dev
cd ~
git clone https://gitee.com/spirecv/spirecv-pro.git
cd spirecv-pro/scripts/spirecv2/
./opencv4110-install.sh
pip install opencv-python==4.11.0.86 opencv-contrib-python==4.11.0.86 yacs
cd ~
wget https://spireai.top/download/spirems/spirems-0.8.1_ubuntu_x86_64.deb
sudo dpkg -i spirems-0.8.1_ubuntu_x86_64.deb
# 注意如果自己的Python版本不是3.10,则修改下面命令中的cp310即可,支持cp38-cp313
wget https://spireai.top/download/spirems/spirems-0.8.1-cp310-cp310-linux_x86_64.whl
pip install spirems-0.8.1-cp310-cp310-linux_x86_64.whl
# 如果 sms ls 命令不能正常使用,再次用sudo安装一遍
# sudo pip install spirems-0.8.1-cp310-cp310-linux_x86_64.whl
# 如果安装较慢,可以添加以下命令,换成华为云的服务器
# -i https://repo.huaweicloud.com/repository/pypi/simple验证安装:
bash
python3 -c "import spirems; print(spirems.__version__)"6. 安装 SpireCV-Pro
6.1 进入SpireCV-Pro仓库
bash
cd ~/spirecv-pro6.2 安装依赖
bash
pip install ultralytics
pip install -e .
# 如果 smsrun ls 命令不能正常使用,再次用sudo安装一遍
# sudo pip install -e .
./build_spirecv2_x86_cuda.shpip install -e . 会以开发模式安装 SpireCV-Pro,同时注册 smsrun 命令行工具。
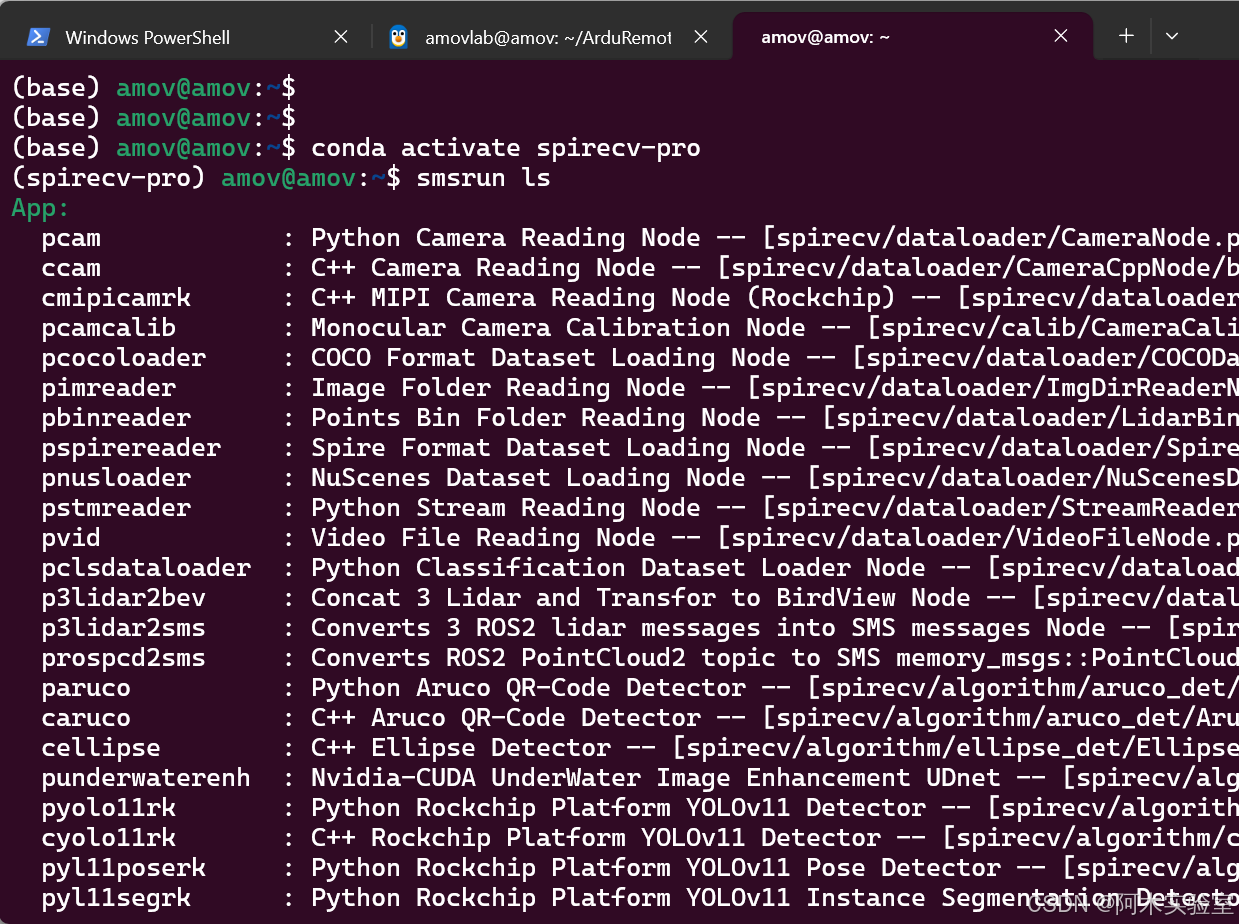
6.3 验证安装
bash
smsrun ls如果看到节点列表和 Launch 列表,说明安装成功。显示结果如下:
7. 运行示例
以下两个示例均使用内置视频文件,无需摄像头。
7.1 启动 SpireMS Core
打开一个 WSL 终端,激活虚拟环境后启动 Core:
bash
source ~/spirecv_env/bin/activate
smscore保持此终端运行,Core 是所有节点通信的中心。
7.2 示例一:YOLO11 目标检测可视化
打开另一个 WSL 终端,执行:
bash
source ~/spirecv_env/bin/activate
smsrun viddet_yolo11_vis_cuda这个 Launch 文件会自动启动三个节点:
| 节点 | 作用 |
|---|---|
pvid |
读取内置无人机航拍视频(自动下载) |
pyolo11cuda |
使用 YOLO11 模型进行目标检测(CUDA 加速) |
pdetvis |
将检测结果绘制到图像上并弹出窗口显示 |
预期效果 :弹出 OpenCV 窗口,画面中的车辆、行人等目标被红色框标出,显示类别名称和置信度。按 q 键或 Ctrl+C 退出。
自定义参数:
bash
smsrun viddet_yolo11_vis_cuda confidence=0.3 pt_model=sms::yolo11m.pt| 参数 | 说明 | 默认值 |
|---|---|---|
confidence |
检测置信度阈值 | 0.2 |
pt_model |
模型(sms:: 前缀自动下载) |
sms::visdrone2019_det-yolo11s... |
imgsz |
推理图像尺寸 | 1280 |
7.3 示例二:ArUco 二维码检测与位姿估计
bash
source ~/spirecv_env/bin/activate
cd ~/spirecv-pro
smsrun viddet_aruco_det启动的节点:
| 节点 | 作用 |
|---|---|
pvid |
读取内置二维码视频(自动下载) |
paruco |
检测 ArUco 二维码并估计 3D 位姿 |
pdetvis |
绘制检测框和坐标轴,弹出窗口显示 |
预期效果 :弹出 OpenCV 窗口,二维码被绿色框标出,并绘制 3D 坐标轴(红X/绿Y/蓝Z),显示二维码 ID。按 q 键或 Ctrl+C 退出。
自定义参数:
bash
smsrun viddet_aruco_det marker_lengths=[0.05] dictionary_id=4| 参数 | 说明 | 默认值 |
|---|---|---|
marker_lengths |
二维码实际边长(米),用于位姿估计 | [0.039] |
dictionary_id |
ArUco 字典 ID(10=DICT_6X6_250) | 10 |
8. 常见问题
Q: smsrun ls 看不到 CUDA 节点?
确认 PyTorch CUDA 可用:
bash
python3 -c "import torch; print(torch.cuda.is_available())"如果返回 False,检查 Windows NVIDIA 驱动是否安装,WSL 版本是否为 WSL2。
Q: 提示 spirems 找不到?
确认已激活虚拟环境并安装了 spirems:
bash
source ~/spirecv_env/bin/activate
pip install spiremsQ: 如何查看所有可用的 Launch 和节点?
bash
smsrun ls # 查看当前平台可用的节点和 Launch
smsrun ls -a # 查看所有节点(包括不兼容当前平台的)9. 下一步
-
查看 SpireCV-Pro 使用手册 了解更多功能
-
查看 SpireMS 使用手册 了解通信框架
remsQ: 如何查看所有可用的 Launch 和节点?
bashsmsrun ls # 查看当前平台可用的节点和 Launch smsrun ls -a # 查看所有节点(包括不兼容当前平台的)
9. 下一步
- 查看 SpireCV-Pro 使用手册 了解更多功能
- 查看 SpireMS 使用手册 了解通信框架
- 尝试其他 Launch 文件,如多目标跟踪、RTSP 推流等